| 第1章 | 回到目录 | 第3章 |
|---|
第2章-一类多智能体系统的领导-跟随一致性
- 2.1 引言
- 2.2 问题描述
- 2.3 无时滞的多智能体系统领导-跟随一致性
- 2.3.1 固定拓扑结构
- 2.3.2 切换拓扑结构
- 2.4 通信时滞的多智能体领导-跟随一致性
- 2.5 领导-跟随一致性仿真
- 2.6 本章小结
本章所编写程序已经上传网络,请自行 下载~
2.1 引言
2.2 问题描述
每个跟随者的动态模型为
x
˙
i
(
t
)
=
x
i
(
t
)
u
i
(
t
)
,
i
=
1
,
2
,
⋯
,
n
(2-1)
dot{x}_i(t) = red{x_i(t)}u_i(t), i=1,2,cdots, n tag{2-1}
x˙i(t)=xi(t)ui(t),i=1,2,⋯,n(2-1)
假定领导者是静态的,其系统为
x
˙
1
(
t
)
=
0
(2-2)
dot{x}_1(t) = 0 tag{2-2}
x˙1(t)=0(2-2)
2.3 无时滞的多智能体系统领导-跟随一致性
2.3.1 固定拓扑结构
控制协议:
u
i
(
t
)
=
∑
v
j
∈
N
i
a
i
j
(
x
j
(
t
)
−
x
i
(
t
)
)
−
b
i
(
x
i
(
t
)
−
x
~
)
,
i
∈
I
.
(2-3)
u_i(t) = sum_{v_j in N_i} a_{ij}(x_j(t) - x_i(t)) - b_i(x_i(t)-red{tilde{x}}),quad iin I. tag{2-3}
ui(t)=vj∈Ni∑aij(xj(t)−xi(t))−bi(xi(t)−x~),i∈I.(2-3)
2.3.2 切换拓扑结构
控制协议:
u
i
(
t
)
=
∑
v
j
∈
N
i
a
i
j
(
t
)
[
x
j
(
t
)
−
x
i
(
t
)
]
−
b
i
(
t
)
[
x
i
(
t
)
−
x
~
]
,
t
∈
[
t
l
,
t
l
+
τ
l
)
,
l
=
0
,
1
,
⋯
,
i
∈
I
.
(2-8)
u_i(t) = sum_{v_jin N_i} a_{ij}(t) [x_j(t)-x_i(t)]-b_i(t)[x_i(t)-tilde{x}],\quad tin[t_l, t_l+tau_l), l=0,1,cdots,iin I. tag{2-8}
ui(t)=vj∈Ni∑aij(t)[xj(t)−xi(t)]−bi(t)[xi(t)−x~],t∈[tl,tl+τl),l=0,1,⋯,i∈I.(2-8)
2.4 通信时滞的多智能体领导-跟随一致性
控制协议:
u
i
(
t
)
=
∑
v
j
∈
N
i
a
i
j
(
x
j
(
t
−
τ
i
j
)
−
x
i
(
t
)
)
−
b
i
(
x
i
(
t
)
−
x
~
)
,
i
∈
I
(2-10)
u_i(t) = sum_{v_jin N_i} a_{ij}(x_j(t-tau_{ij})-x_i(t)) - b_i(x_i(t)-tilde{x}), quad iin I tag{2-10}
ui(t)=vj∈Ni∑aij(xj(t−τij)−xi(t))−bi(xi(t)−x~),i∈I(2-10)
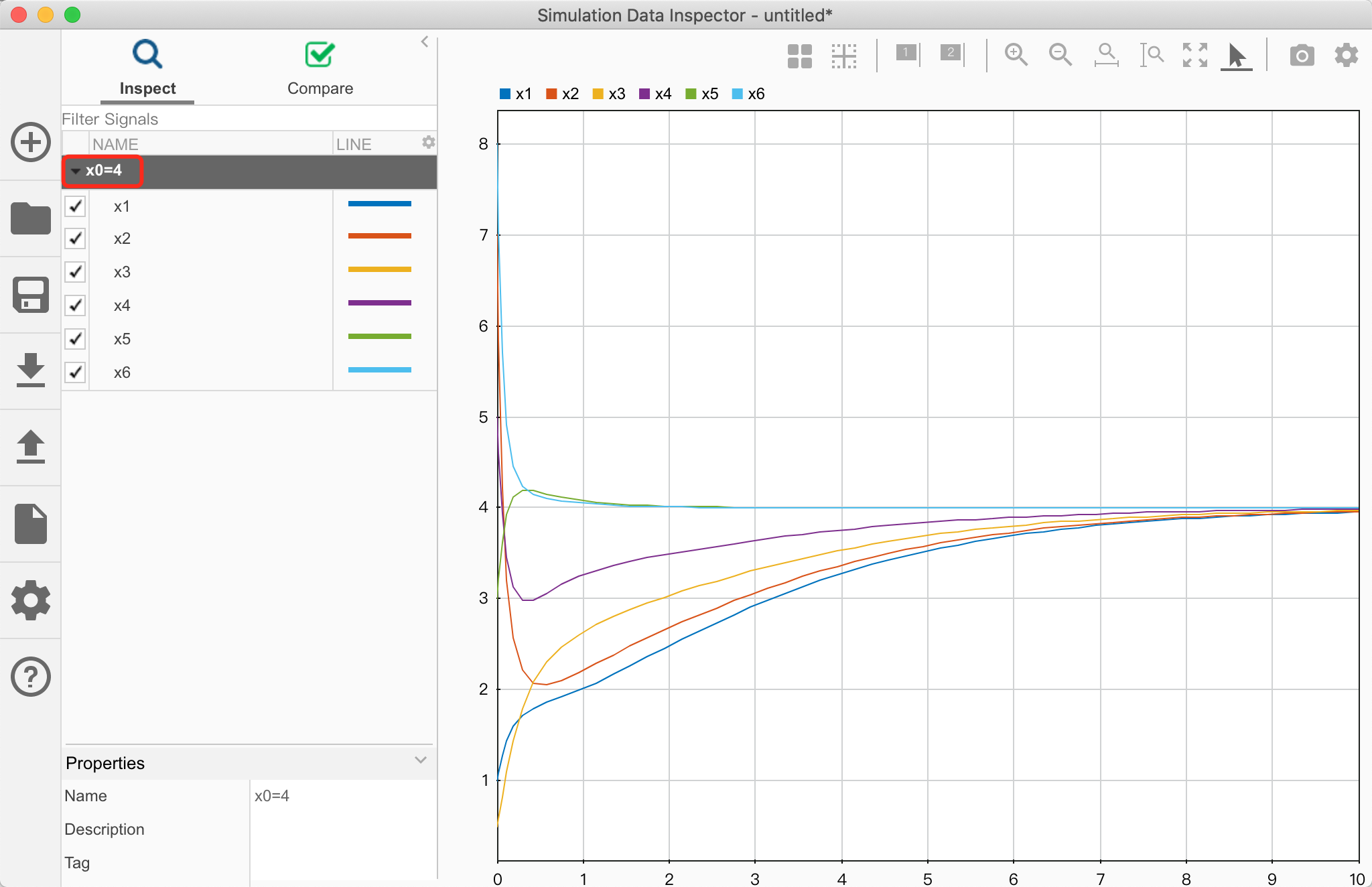
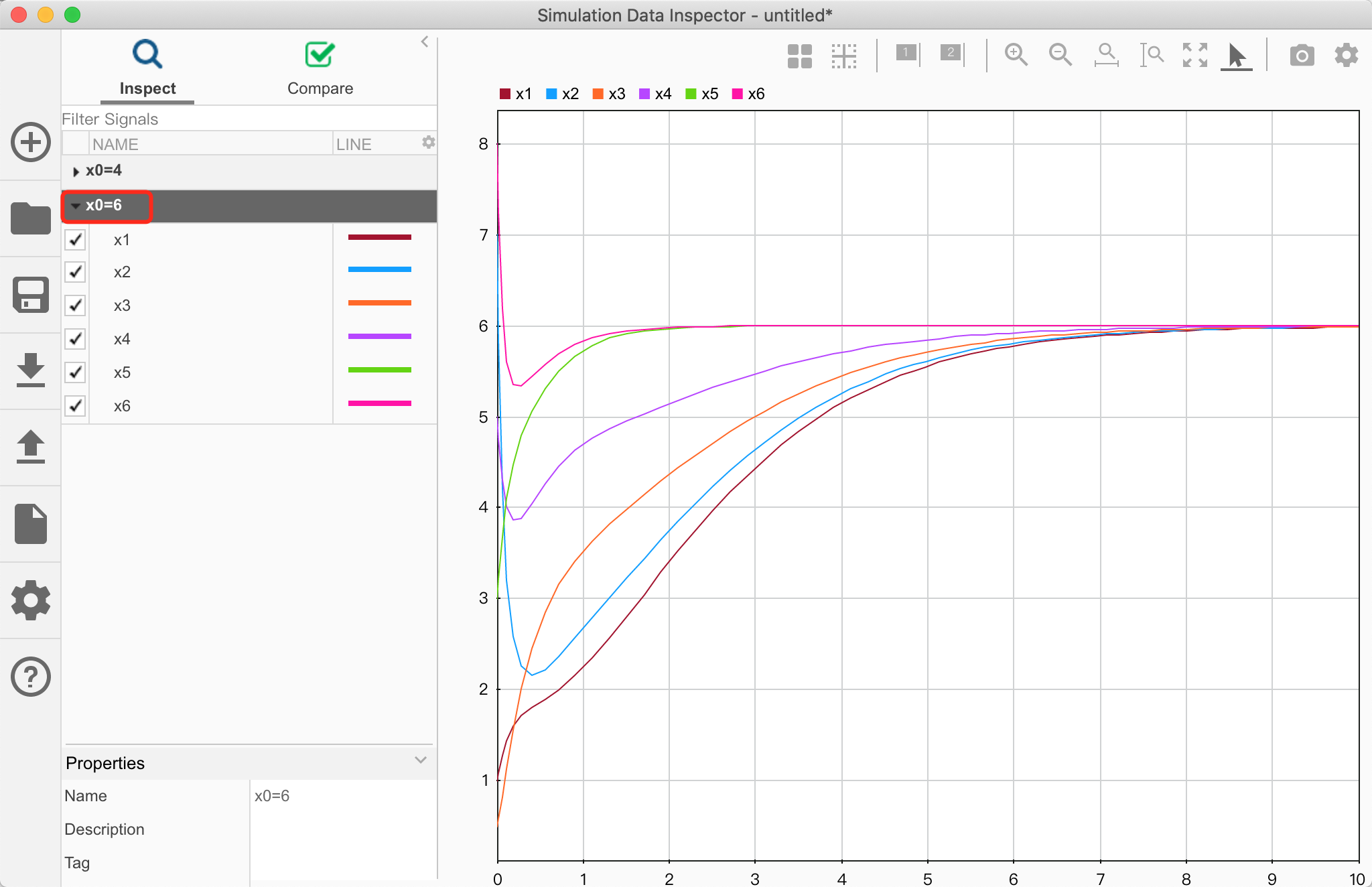
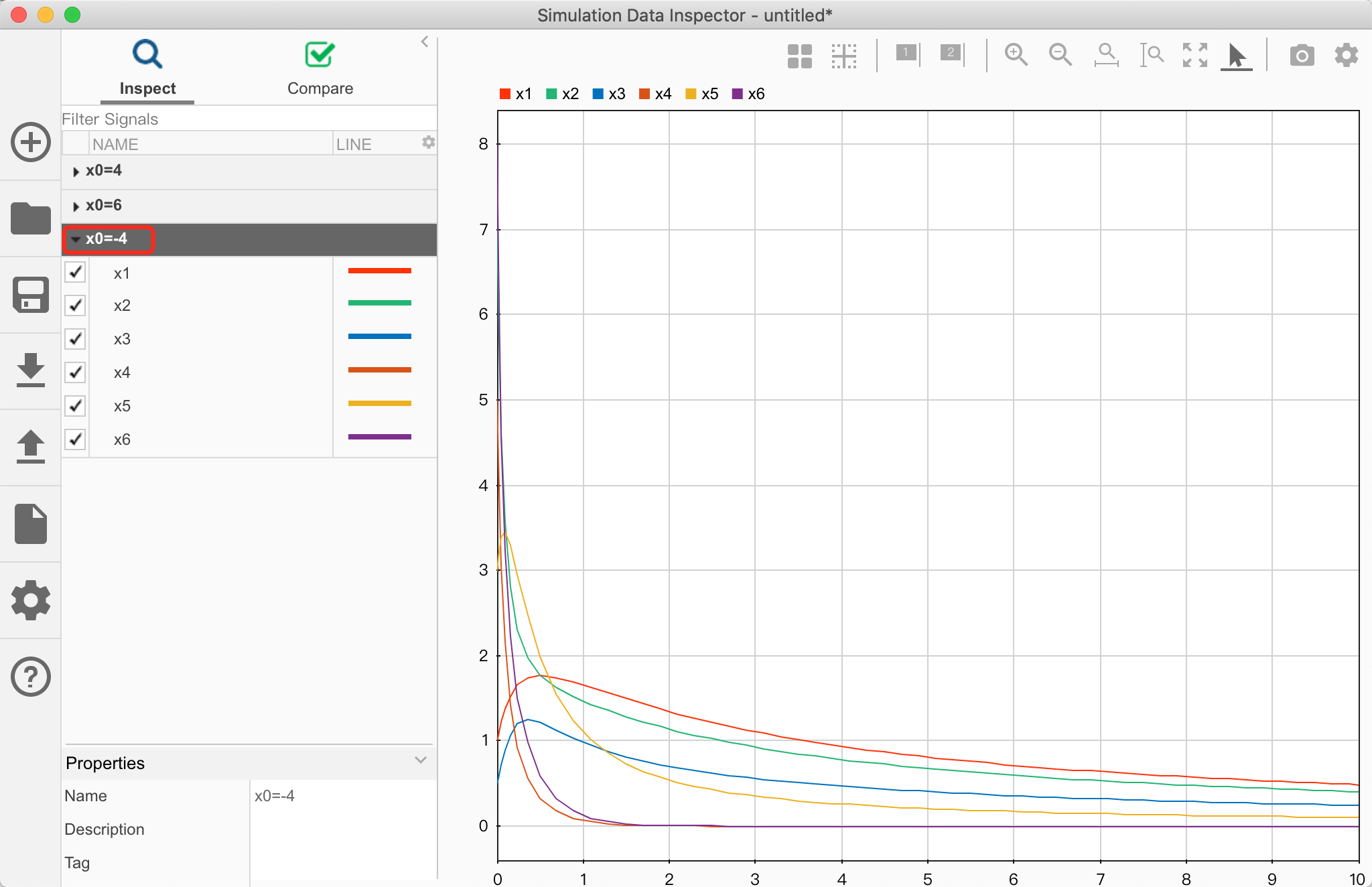
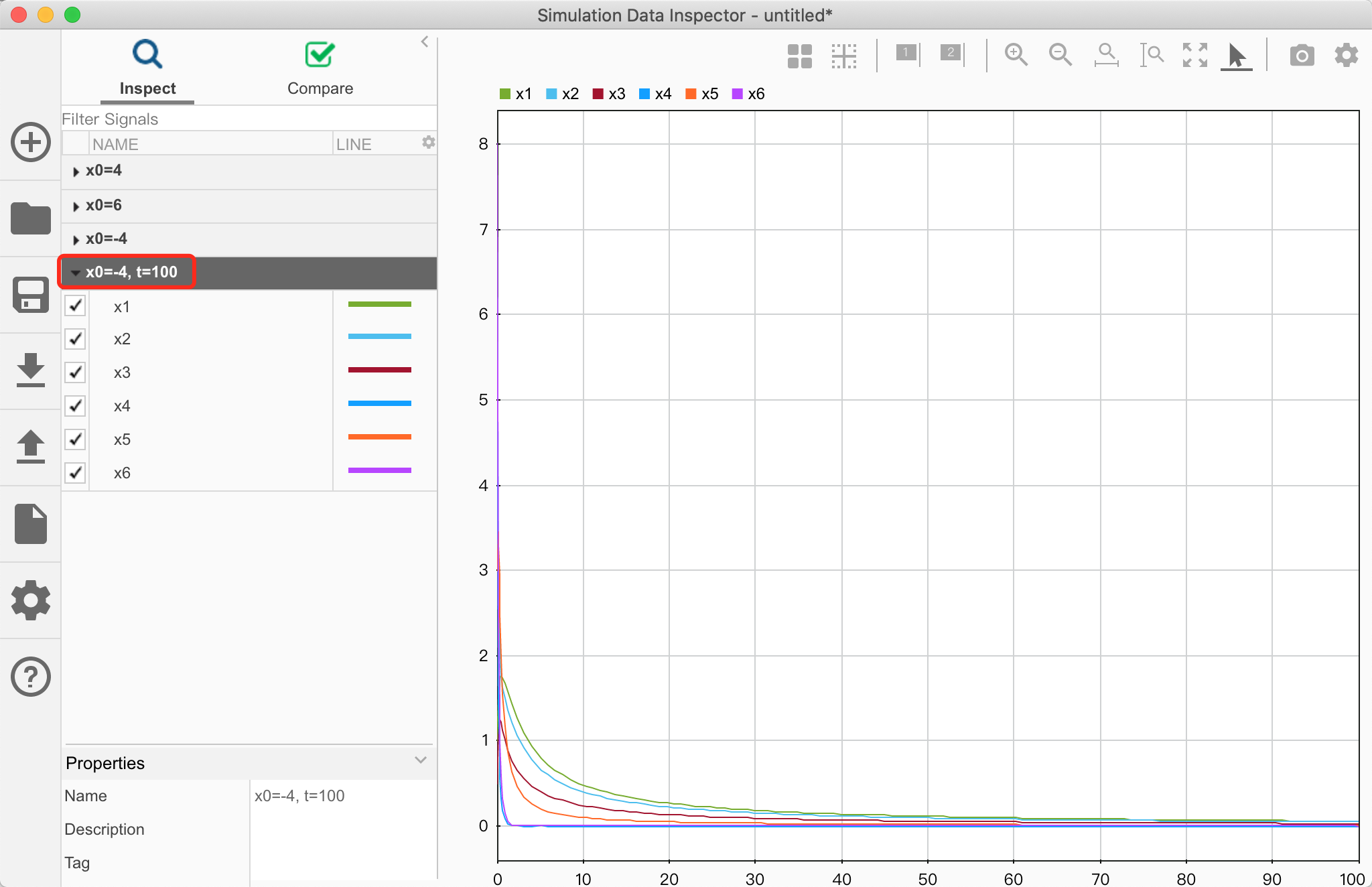
2.5 领导-跟随一致性仿真
模型结构
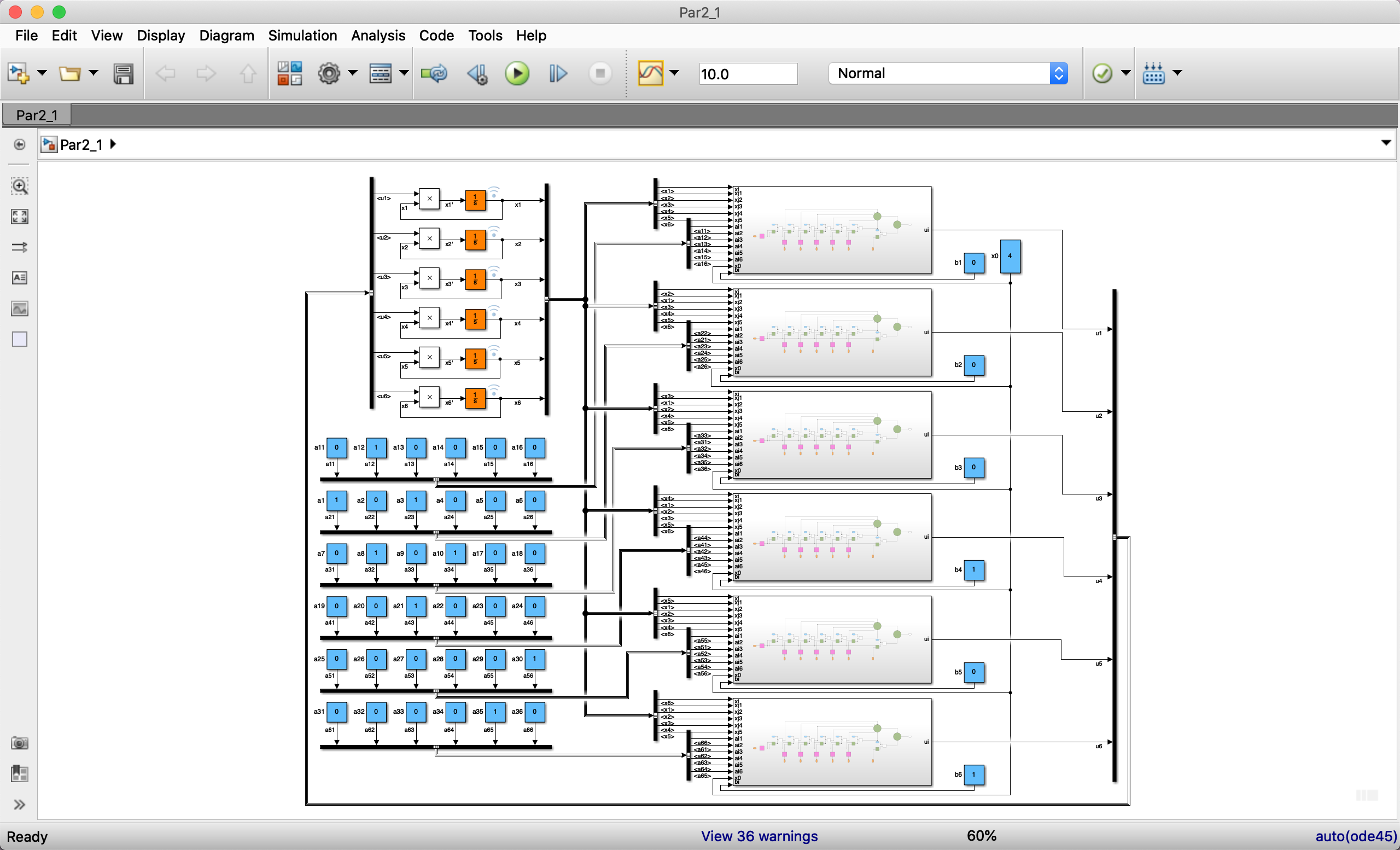
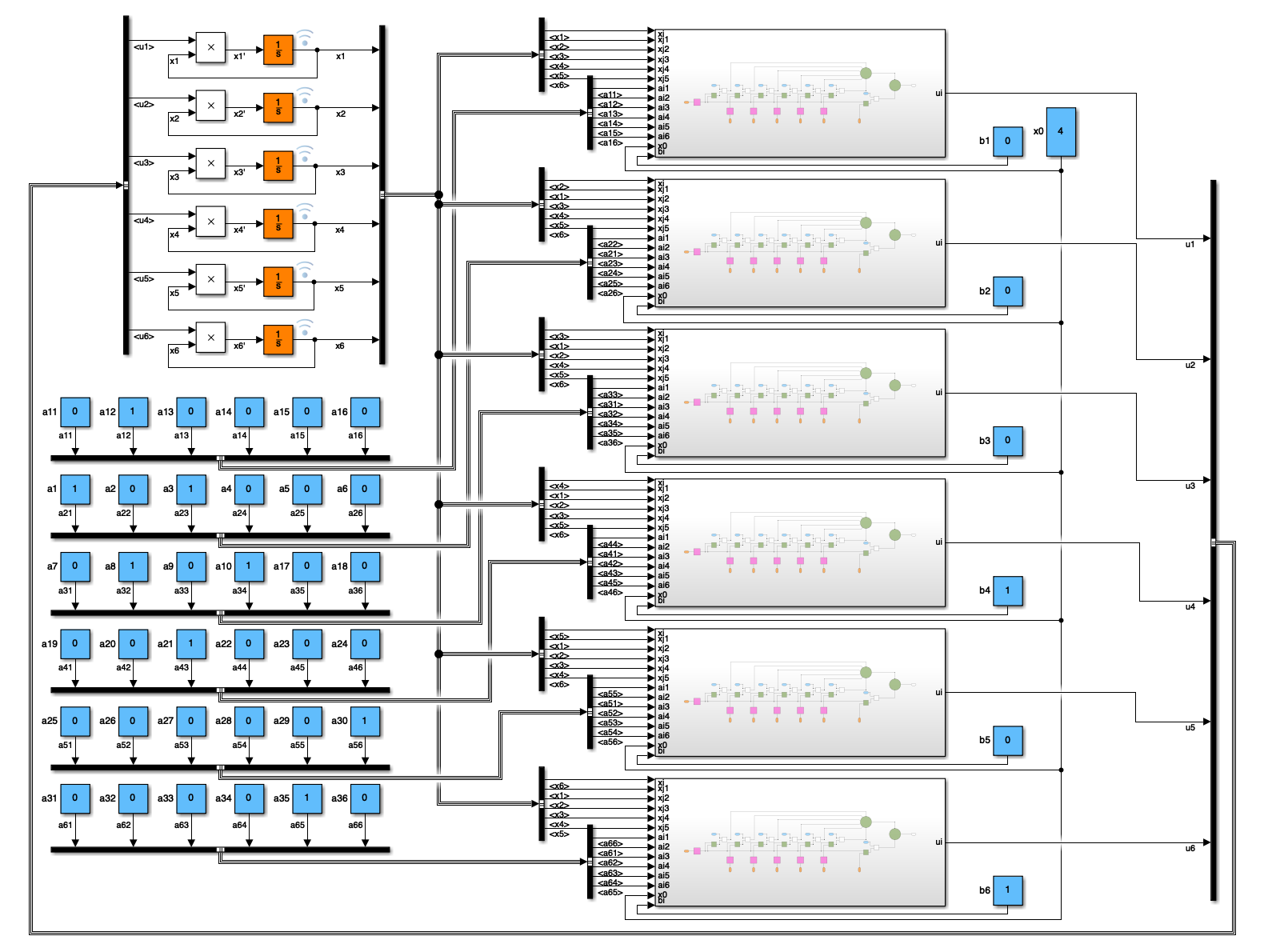
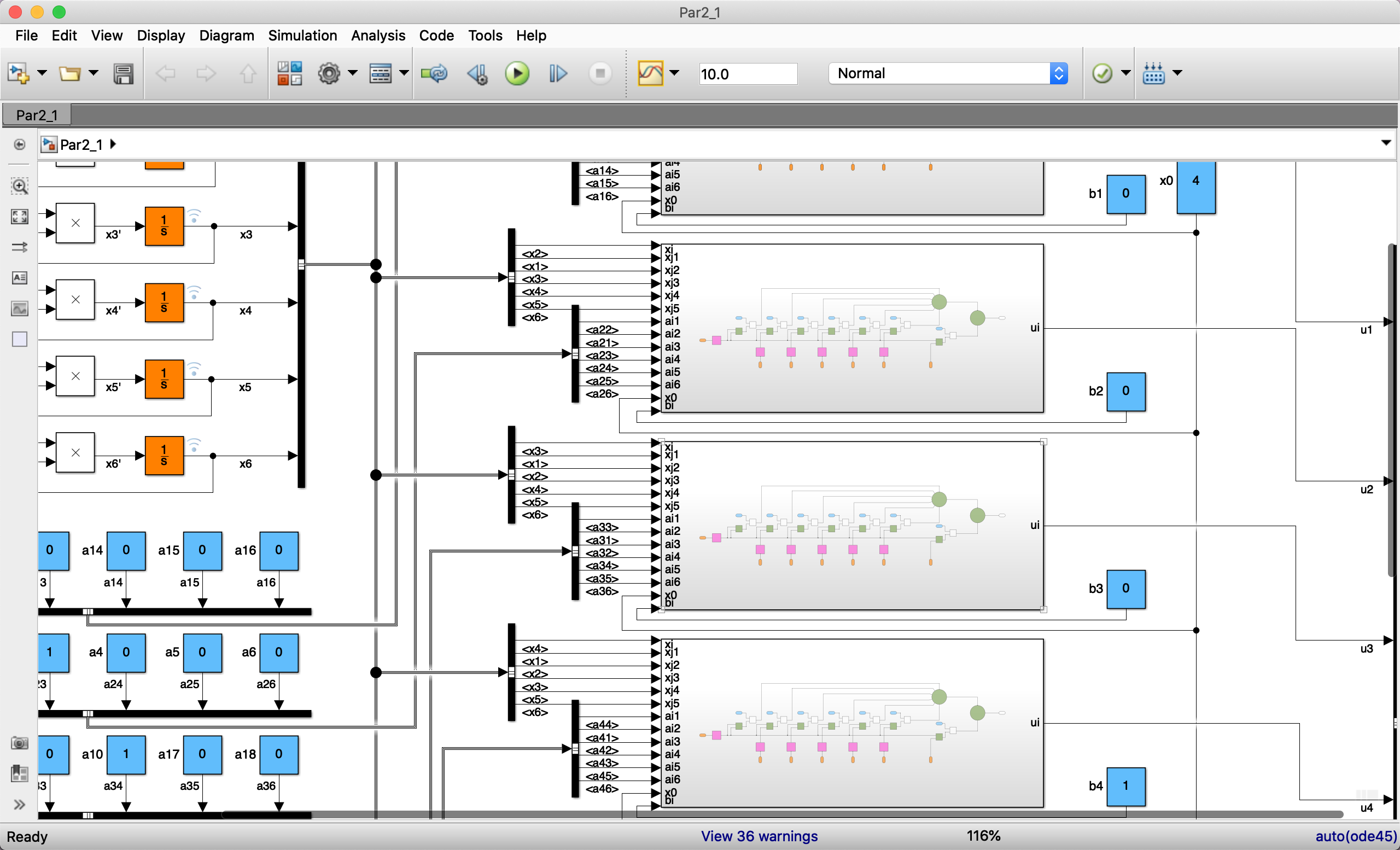
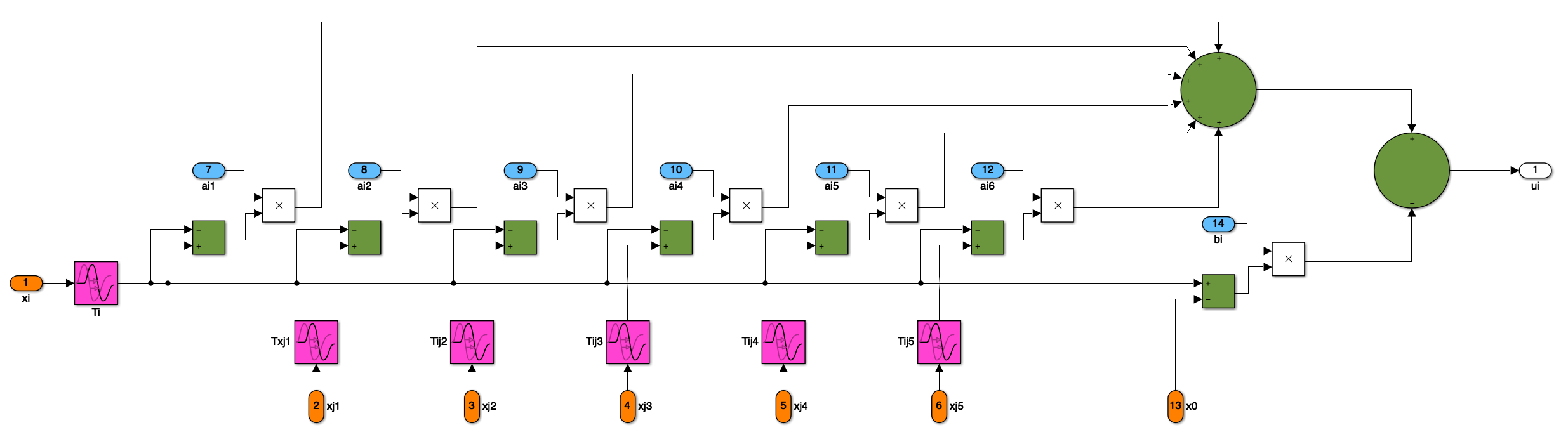
仿真结果
2.6 本章小结
好文章:集群机器人规划与控制–基于simulink
最后
以上就是土豪咖啡最近收集整理的关于【控制】《多智能体系统一致性与复杂网络同步控制》郭凌老师-第2章-一类多智能体系统的领导-跟随一致性的全部内容,更多相关【控制】《多智能体系统一致性与复杂网络同步控制》郭凌老师-第2章-一类多智能体系统内容请搜索靠谱客的其他文章。








发表评论 取消回复