UP目录
一、理论基础
二、核心程序
三、测试结果
一、理论基础
Flocking(有时也称为是warming或herding),拥有4项简单的规则,把它们组合在一起时,为自治主体群给出一个类似于鸟群、鱼群的群体行为的逼真形式。多智能体集群运动控制技术,是未来大规模无人机集群搜索、大规模自主编队表演技术、超远距无人机集群中继通信等一系列应用场景的技术基石。如何让分布式集群拥有超强避障能力,更是现有研究中的重点。现有的比较成熟的方案是以建模生物体集群运动为核心出发的,通过将障碍物比作虚拟的智能体来实现避障,这种方案又被称为Flocking算法。
在本方案中,考虑由N个α-智能体组成的智能群体, 其动态方程为:


在Flocking算法中,定向行为规则可以分为分离原则、列队原则、聚合原则、躲避原则
分离原则:定向时要避免与本地flock同伴拥挤。即定时检测邻近同伴,避免拥挤;
列队原则:驶向本地flock同伴的平均航向。即检测邻近同伴航向、速度,获取平均值并调整自己;
聚合原则:定向时朝着本地flock同伴的平均位置移动。即检测邻近同伴,平均位置然后调整其匹配航向;
躲避原则:使避免撞上局部区域内的障碍或敌人。即“向前看一段距离”,遇到障碍物、敌人调整航向、速度进行躲避。
二、核心程序
....................................................
clear;
close all;
clc;
%% Parameters 初始化参数
num_agents = 100;
t_gap=1; % 迭代间隔
queue_gap=15; % 队形间隔
queue_vy=12;
queue_vx=13;
queue_r=40;
r_c=20; % 交互范围(半径)
k=1.2; % 晶格的ratio
d=r_c/k; % 晶格的scale(表示两两智能体之间的距离(论文中公式5))
v_0=2; % 初始速度
v_limit=0; % 最大速度
efs = 1; % sigma-norms parameter
h=0.4; % 设置bump function的分割点(公式10)
d_o = r_c;
r_c_sigma = sigma_norm(r_c,efs); % r_c的σ范数
d_sigma = sigma_norm(d,efs); % d的σ范数
map_width = 400; % width of a squre map
map_res = 0.5; % width of a grid to play obstacles pixel
c1=0.2;c2=0.5;c3=0.2;c4=0.1;c5=10;c6=0.01;
x = zeros(num_agents,2); % current position
x_1 = zeros(num_agents,2); % previous position
v_1 = zeros(num_agents,2); % previous velocity
x_r0= zeros(num_agents,2); % x_r0:用来存储指定的队形信息
v_r_1st_point=300;
path_num = zeros(1000,2,num_agents);
v_r=[1,0];
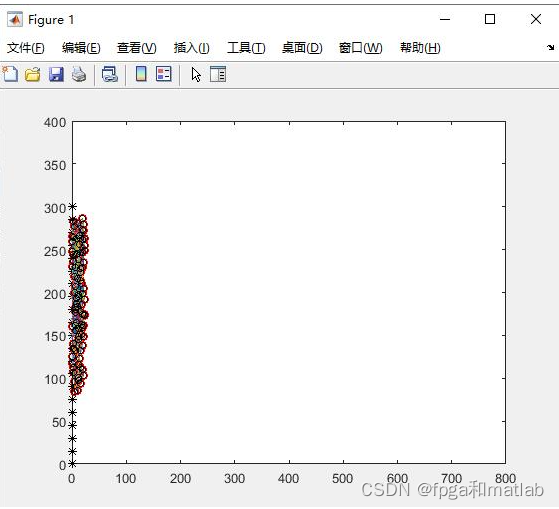
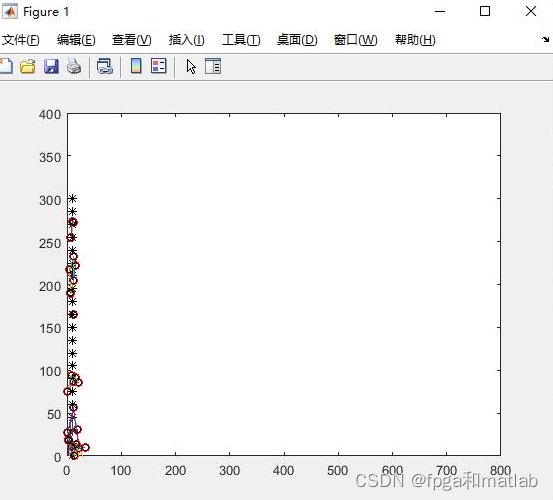
%% 生成不同编队队形的智能体坐标
% % 使α-agent群集呈现竖“一”(指定预期坐标)
for a=1:1:num_agents
b=v_r_1st_point-(a-1)*queue_gap;
x_r1(a,2)=b;
end
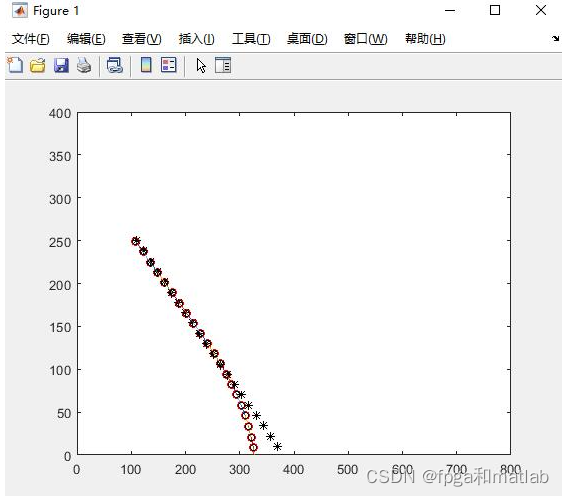
% % 使α-agent群集呈现V字形
for a=1:1:num_agents
queue_vy=12;
b=250-(a-1)*queue_vy;
x_r2(a,2)=b;
if a<=num_agents/2
c=100+queue_vx*(a-1);
x_r2(a,1)=c;
else
c=100+queue_vx*(num_agents-a);
x_r2(a,1)=c;
end
end
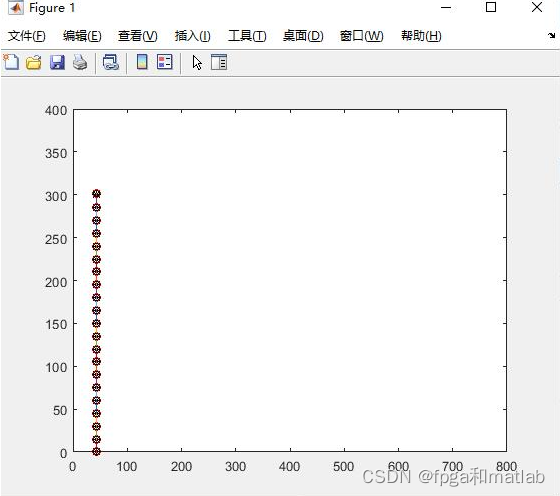
% % 坐标更新后的竖“一”
for a=1:1:num_agents
b=v_r_1st_point-(a-1)*queue_gap;
x_r3(a,2)=b;
x_r3(a,1)=200+queue_vx*ceil(num_agents/2);
end
% % 使α-agent群集呈现倒V字形
for a=1:1:num_agents
b=250-(a-1)*queue_vy;
x_r4(a,2)=b;
if a<=num_agents/2
c=340+queue_vx*ceil(num_agents/2)-queue_vx*(a-1);
x_r4(a,1)=c;
else
c=340+queue_vx*ceil(num_agents/2)-queue_vx*(num_agents-a);
x_r4(a,1)=c;
end
end
% % 使α-agent群集呈现圆形
for a=1:num_agents
theta=2*pi/num_agents;
xo=[450+queue_vx*ceil(num_agents/2),240];
x_r5(a,1)=xo(1)+queue_r*sin(a*theta);
x_r5(a,2)=xo(2)-queue_r*cos(a*theta);
end
% % 坐标再次更新后的横“一”
for a=1:1:num_agents
b=v_r_1st_point-(a-1)*queue_gap;
x_r6(a,2)=b;
x_r6(a,1)=580+2*queue_r;
end
% x_r=[0,150;0,130;0,110];
% %initializing agents 随机生成坐标
x_1(:,1)=20*rand(num_agents,1); % x_1第一列是agent的x初始坐标
x_1(:,2) = map_width/2*rand(num_agents,1)+map_width/4; % x_1第二列是agent的y初始坐标
counter = 0; % 用于记录循环次数
%% main loop 主循环
while(true)
counter=counter+1;
u_alpha=zeros(num_agents,2); % alpha-agents correspond to UAVs 初始化alpha agent
u_gamma=zeros(num_agents,2); % gamma-objects which model the effect of “collective objective” of a group 初始化gamma agent
dist_gap = get_gap(x_1); % 获取间隔距离
dist_2 = squd_norm(dist_gap); % 距离间隔平方和
dist = sqrt(dist_2); % 对距离平方和开方 获得距离
dist_sigma=sigma_norm(dist_gap,efs);
adj = bump_func(dist_sigma/r_c_sigma,h); % 求邻接矩阵
nbr = zeros(num_agents); % 初始化相邻agent矩阵参数
nbr(dist<=r_c) = 1; % 如果两个agent距离小于r_c就算是邻居
nbr = nbr - diag(diag(nbr)); % set diagonal to 0 取中心元素
adj = nbr.*adj; % 得到邻接矩阵
%% 计算过α-agent的控制输入
% % 这个控制输入主要包括两部分
% % 1.目标对α-agent的吸引力
% % 2.α-agent之间的相互作用力
% % 计算γ-agent对每个α-agent的吸引力
% u_gamma=-c1*limit(x_1-repmat(x_r,size(u_gamma,1),1),1)-c2*(v_1-repmat(v_r,size(u_gamma,1),1));
u_gamma=-c1*limit(x_1-x_r0,size(u_gamma,1))-c2*(v_1-repmat(v_r,size(u_gamma,1),1));
% % 计算α-agent之间的相互作用力
for a=1:1:num_agents % 选定一个α-agent
for b=1:num_agents % 通过循环的方式依次计算每个α-agent对选定α-agent的作用力的合力
kk=x_1(b,:)-x_1(a,:);
u_alpha(a,:)=u_alpha(a,:)+c3*adj(a,b)*phi_func(sigma_norm_2(kk,efs)-d_sigma)*sigma_norm_gradient(kk,efs)+c4*adj(a,b)*(v_1(b,:)-v_1(a,:)); % 将选定α-agent受到的合力一次叠加
% u_alpha(a,:)=u_alpha(a,:)+c3*nbr(a,b)*action_function( sigma_norm_2(x_1(a,:)-x_1(b,:),efs),r_c_sigma,d_sigma,h )*sigma_norm_gradient(x_1(b,:)-x_1(a,:),efs)+c4*nbr(a,b)*(v_1(b,:)-v_1(a,:));
end
end
%% 根据gamma和alpha agent得到v和x(卡尔曼滤波),前提在一个运动周期内速度不变。
u=u_gamma+u_alpha; % 计算控制输入
v = v_1 + u*t_gap; % 当前时刻的速度估计 = 前一时刻的速度 + 速度增量
v_1=v; % 不考虑噪声,将估计值直接认为当前时刻的真实值
x(:,1:2) = x_1(:,1:2) + 0.8*v_1*t_gap; % 根据速度计算当前时刻的位置x,x_1表示前一时刻的位置
x_1 = x;
for nn = 1:1:num_agents
path_num(counter,1,nn) = x(nn,1);
path_num(counter,2,nn) = x(nn,2);
end
%% 队形变换
if (counter<100)
x_r1=x_r1+v_r*t_gap;
x_r0=x_r1;
elseif (counter<200)
x_r2=x_r2+v_r*t_gap;
x_r0=x_r2;
elseif counter<300
x_r3=x_r3+v_r*t_gap;
x_r0=x_r3;
elseif counter<400
x_r4=x_r4+v_r*t_gap;
x_r0=x_r4;
elseif counter<500
x_r5=x_r5+v_r*t_gap;
x_r0=x_r5;
else
x_r6=x_r6+v_r*t_gap;
x_r0=x_r6;
end
%% plot
hold off
plot(x(:,1),x(:,2),'ro');
hold on
axis([0 800 0 map_width]);
plot(x_r0(:,1),x_r0(:,2),'k*');
if counter>650
break;
end
hold on
% text(340,150,'★');
%% 通信agent画线
for ii=1:1:num_agents
for jj=1:1:num_agents
if nbr(ii,jj)>0
plot([x(ii,1);x(jj,1)],[x(ii,2);x(jj,2)]);
end
end
end
%%
scatter(x(:,1),x(:,2),20,'black')
% plot(x_r1(:,1),x_r1(:,2),'r*');
pause(0.1);
end
figure(1)
%hold off
for tt = 1:1:num_agents
for t = 1:1:1000
plot(path_num(t,1,tt),path_num(t,2,tt),'k.','MarkerSize',1);
hold on;
end
end
......................................
三、测试结果
使用matlab2021a仿真测试结果如下所示:
up0009
最后
以上就是老实小懒虫最近收集整理的关于基于Flocking算法的多智能体编队matlab仿真一、理论基础二、核心程序三、测试结果的全部内容,更多相关基于Flocking算法内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。






![[论文]一种用于水下机器人分布式编队控制的自适应自组织神经网络方法](https://www.shuijiaxian.com/files_image/reation/bcimg17.png)

发表评论 取消回复