⛄一、Dijkstra算法机器人编队路径规划简介
1 传统Dijkstra算法步骤
Dijkstra算法是一种经典的求解最短路径的算法,用于计算一个节点去往其他各个不相关节点的最小移动代价。本思想是把在图中无论如何出现的所有节点分离为2组,第1组包含被准确认定是最短路径的节点,第2组存放待检查的不确定的节点。根据最小移动代价逐渐增大的顺序,逐个将第2组需要检查的节点加入到第1组中,一直到从起始点出发可以到达的所有节点都包含在第1组中。Dijkstra算法运行的主要特征是以机器人抽象的出发点为中心向外层层延伸,直到延伸到整个区域的末端为止。Dijkstra算法一般能够在最终得到最优的路径,但是这个路径偶尔会出现冗余拐点,由于其遍历节点多,所以有时算法的效率不高。Dijkstra算法流程如图2所示。
分别创建2个表,为:START与FINISH。START表中存放环境中已经生成存在但是未经计算的节点,FINISH表中存放所有经过计算考察的节点。
(1)观测寻找在环境路网中离起始源点近而且是没有被计算过的点,把满足调节的点放在START数组中等待检查。
(2)从START表中找出距离起始点最小的点,然后把该点放进FINISH表中。
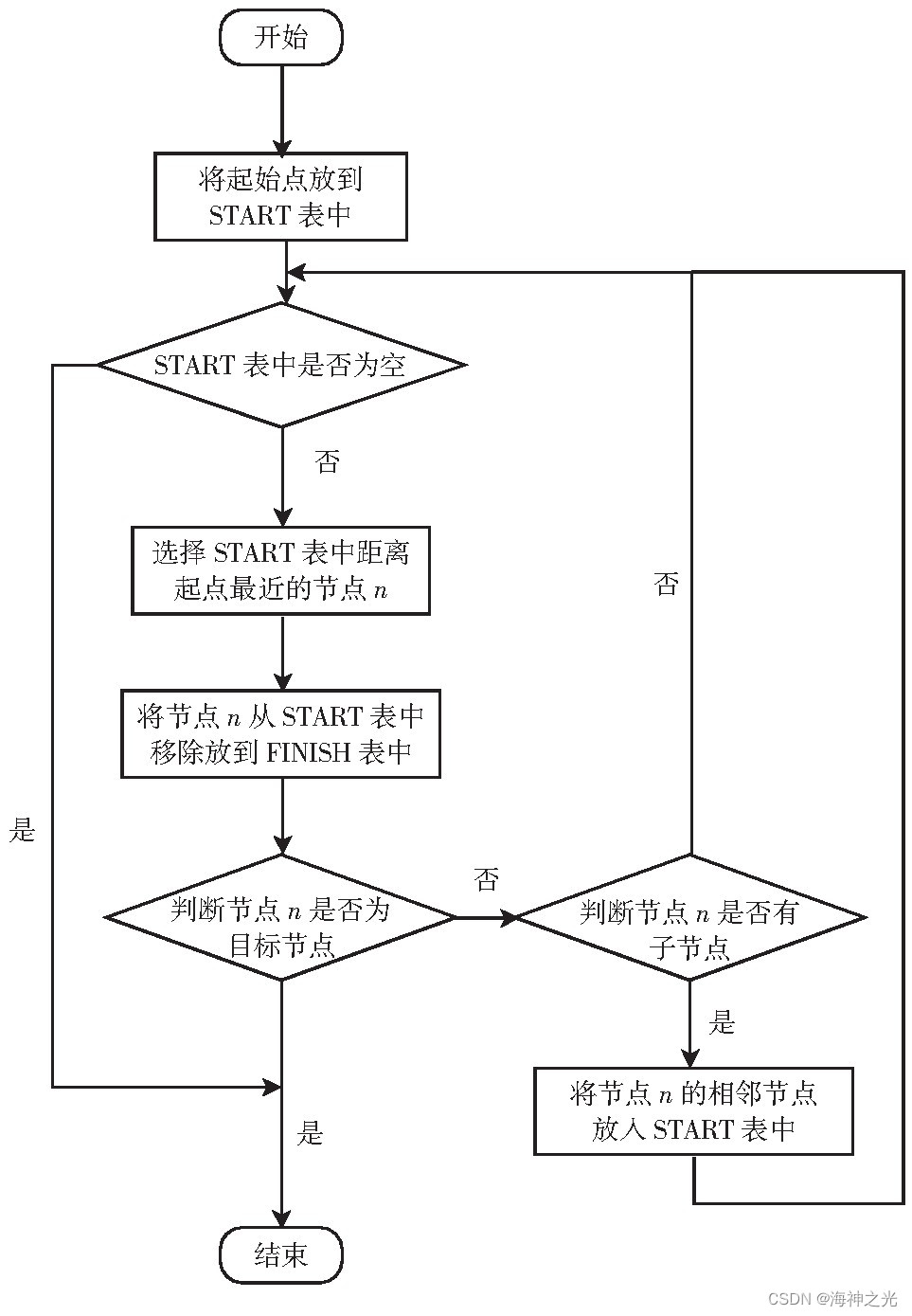
(3)遍历去寻找考察当前此点的子节点,计算出起始源点到这些子节点的距离值,将值存入数组中用来排序,将子节点放在START表中。
(4)重复(2)和(3),直到把START表中的点全部清空,或者找到真正要去的目标点。
2 Dijkstra算法的思想
(1)将环境可视图中出现的节点或是顶点分别加入2个组,其中一组存放经过求解验证为最短路径所经过的顶点,该集合用FINISH表示,刚开始时START表中只有1个起始点,在后面的运算过程中每得到1条最短路径,就把相关节点加入到集合FINISH中。如果全部的顶点都加入到FINISH后,此算法运算完成。另一组存放未经过考察且还未被认定为最短路径的顶点,用START表示。
(2)在将顶点逐渐加入到FINISH表的过程中,在运行算法期间总保持从出发点到FINISH表中各个点的最短路径的长度不超过出发点到START表中任何顶点的最短路径长度。
典型的Dijkstra算法在寻找最优路径的准则上较为单一,以某一个点为中心向外层层扩展就类似于画圆,随着搜索半径的逐渐增大,最后总能找到想要的目标点,但同时最优路径会出现一些无关的冗余点,这样在一定程度上给实际的移动机器人造成寻找路径的困难。如果能够对经典算法的计算准则进行优化,达到减少路径中拐点的目的,就可以减少一大部分机器人寻路所耗费的时间。在大面积环境中使用Dijkstra算法时,由于每次都要从START列表中挑选离原始点最近的点,这样导致规划效率不高,在排序过程消耗很多不必要的工作时间。
⛄二、部分源代码
clc;
clear all;
close all;
cmap = [1 1 1; …
0 0 0; …
1 0 0; …
0 0 1; …
0 1 0; …
1 1 0; …
0.5 0.5 0.5];
colormap(cmap);
%% Define a small map
map_size = 100;
map = false(map_size);
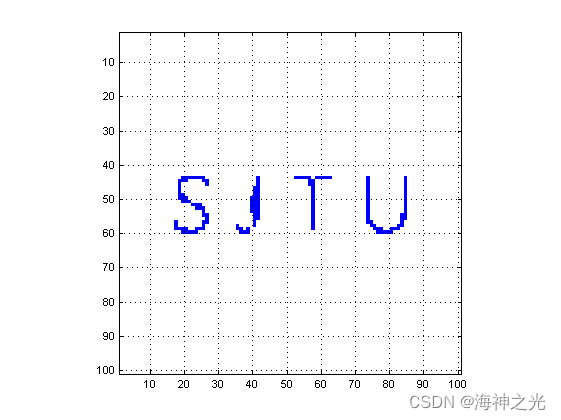
%% Read Picture For Goal Position
picture=imread(‘1.png’); %Read a picture
GoalPosition = ReadPictureForSketch(picture, map_size);
%Problem Defination
nVar = 2; %Number of Variables
VarSize = [1, nVar]; %Matrix Size of Decision Variables
nPop = length(find(GoalPosition==1)); %Population Size(Robot Number)
%Initialization
%The Particle Template
empty_particle.Position = [];
empty_particle.NextPosition = [];
empty_particle.Velocity = [];
empty_particle.Cost = [];
empty_particle.Goal = [];
empty_particle.Best.Position = [];
empty_particle.Best.Cost = [];
empty_particle.Best.Index = [];
%Create Population Array
particle = repmat(empty_particle, nPop, 1);
%Initialize Global Best
GlobalBest.Cost = inf;
%%Initialize Position and Goal
[goal_location_x_array goal_location_y_array] = find(GoalPosition==1);
for i = 1:nPop
[start_x start_y] = ind2sub(size(map), i+0.5*size(map, 1)*size(map, 1));
particle(i).Position = [start_y start_x];
particle(i).Goal = [goal_location_x_array(i) goal_location_y_array(i)];
end
%initial the map to show
map_plot = zeros(map_size);
map_plot(~map) = 1; % Mark free cells
map_plot(map) = 2; % Mark obstacle cells
%%
while(1)
for i = 1:nPop
neighbours = GetSurroundingPositions(particle(i).Position);
MinCost = inf;
particle(i).NextPosition =zeros(VarSize);
%Get the cloest point to goal
for j = 1:size(neighbours, 1)
current_x = neighbours(j, 1);
current_y = neighbours(j, 2);
if (current_x >0 && current_x <= size(map, 1) && current_y >0 && current_y <= size(map, 1)) %the point in the field
if (map_plot(current_x, current_y) ~=2) %the point is not collision
DistanceToGoal = abs(particle(i).Goal(1) - current_x) + abs(particle(i).Goal(2) - current_y);
if(DistanceToGoal < MinCost) %the point is closer than others
particle(i).NextPosition(1) = current_x;
particle(i).NextPosition(2) = current_y;
MinCost = DistanceToGoal;
end
end
end
end
end
GoalExchangeArray = zeros(1, nPop);
for i = 1:nPop
for j = i:nPop
if(GoalExchangeArray(i) || GoalExchangeArray(j))
break
end
GoalExchange = false;
if (isempty(setdiff(particle(i).NextPosition, particle(j).Position)) && isempty(setdiff(particle(j).NextPosition, particle(i).Position)))
GoalExchange = true;
end
% if (isempty(setdiff(particle(i).NextPosition, particle(j).Position)) && isempty(setdiff(particle(j).NextPosition, particle(j).Position)))
% GoalExchange = true;
% end
%
% if (isempty(setdiff(particle(j).NextPosition, particle(i).Position)) && isempty(setdiff(particle(i).NextPosition, particle(i).Position)))
% GoalExchange = true;
% end
if(GoalExchange && (mod(randperm(100,1), 10) > 5))
TempGoal = particle(i).Goal; %exchange the goal
particle(i).Goal = particle(j).Goal;
particle(j).Goal =TempGoal;
particle(i).NextPosition = particle(i).Position; %keep the particel static
particle(j).NextPosition = particle(j).Position;
GoalExchangeArray(i) = 1;
GoalExchangeArray(j) = 1;
end
end
end
%check if the NextPosition will colllision with other particles or not
for i= 1:nPop
if(map_plot(particle(i).NextPosition(1), particle(i).NextPosition(2)) ~=1)
particle(i).NextPosition = particle(i).Position;
end
%Update the map_plot
map_plot(particle(i).Position(1), particle(i).Position(2)) = 1;
particle(i).Position = particle(i).NextPosition;
map_plot(particle(i).Position(1), particle(i).Position(2)) = 4;
end
%change the goal according to the position of the particle randomly
if (mod(randperm(100,1), 11) > 3)
goal_assigned = GoalAssignment(reshape([particle(1:nPop).Position], 2, nPop)‘, reshape([particle(1:nPop).Goal], 2, nPop)’, map_size);
for i=1:nPop
particle(i).Goal(???? = goal_assigned(i, ????;
end
end
%Display
ShowImage(map_plot);
%check the task is finished or not
end
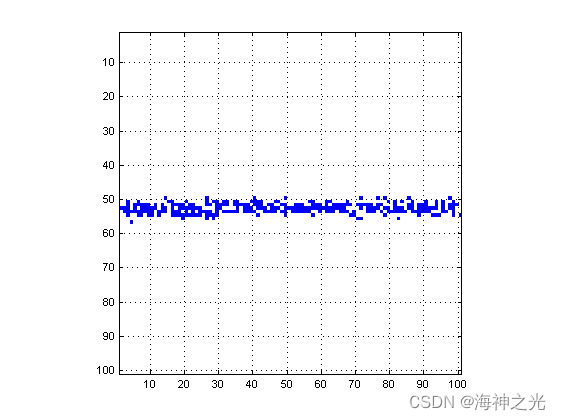
⛄三、运行结果
⛄四、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1]陈智康,刘佳,王丹丹,张运喜.改进Dijkstra机器人路径规划算法研究[J].天津职业技术师范大学学报. 2020,30(03)
3 备注
简介此部分摘自互联网,仅供参考,若侵权,联系删除
最后
以上就是孝顺画笔最近收集整理的关于【路径规划】基于matlab Dijkstra算法机器人编队路径规划【含Matlab源码 1884期】的全部内容,更多相关【路径规划】基于matlab内容请搜索靠谱客的其他文章。



![[论文]一种用于水下机器人分布式编队控制的自适应自组织神经网络方法](https://www.shuijiaxian.com/files_image/reation/bcimg17.png)




发表评论 取消回复