(from prescan help documents)
FILING AND SETTING-UP OF THE MODELS
The PreScan scenario models are stored under the DestinationFolder/TestScenarios/LKAS.
Note: Before opening the test scenario model, make sure that:
1.Simulink is configured for PreScan.
2.‘Computer Vision System Toolbox’ is installed (also known as the ‘Video_and_Image_Blockset’).
3.‘DSP System Toolbox’ is installed (also known as ‘Signal_Blocks’).
4.MATLAB compiler is defined (Run mex -setup to verify)
GroupID
a lane line (or a part of it) is in general represented by more than one set of polynomials. The GroupID of each polynomial set allows the user to tell which polynomial sets describe the same line.
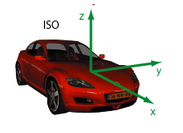
Coordinate system for motion
The MATLAB/Simulink model position & orientation outputs are in accordance with the ISO standards for car position (as depicted in the figure below), with right hand rule for the orientations. The orientation of ISO is described as successive rotations around the XYZ axes, expressed as Roll, Pitch and Yaw (RPY).
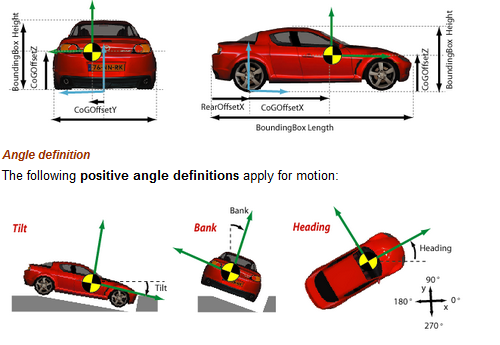
Again, the origin of actor models is defined at the center of gravity (see figure below). This is the point were the motion (translations & rotations) affect the body. Note that the CoG is defined with respect to a reference axis system. This is in most cases positioned in the middle of the rear axle at ground level, like displayed in the next picture. Sensors have the same reference axis system.
最后
以上就是魔幻老鼠最近收集整理的关于Prescan的全部内容,更多相关Prescan内容请搜索靠谱客的其他文章。








发表评论 取消回复