为了自己和他人学习的需要,建了一个PreScan的QQ群:613469333(已满)/ 778225322(可加),加群前请私聊群主(QQ:2059799865)加入。群管理需要花费时间和精力,为了鼓励管理员和群成员积极互动,入群需交¥9.99的群费。
PreScan中提供的Sensor可以参考https://mp.csdn.net/postedit/88565400,但是一直并没有完全搞清楚每一种传感,直到看了对应的help,果然help是最好的学习资料。能够仅仅依靠help就掌握好一个软件或者方法,是学习能力的体现。
下面谈一下我对sensor的理解。
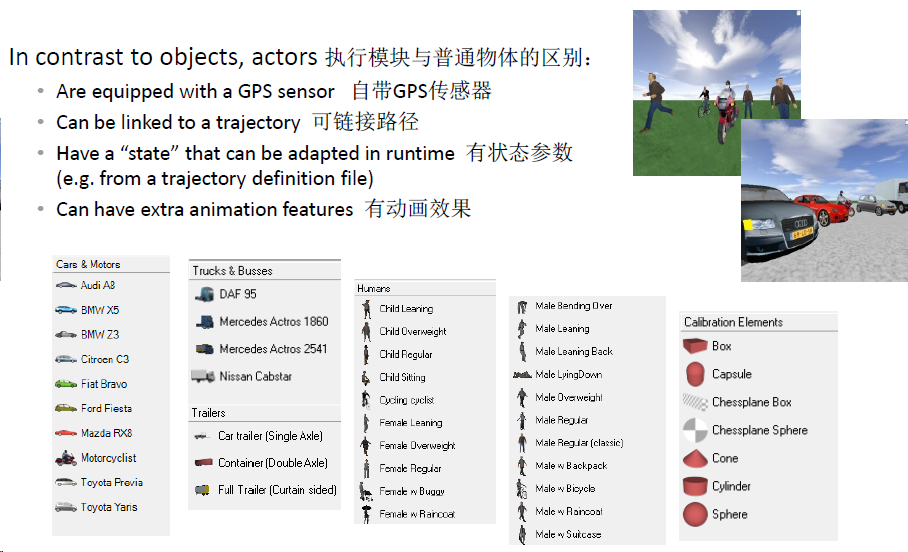
首先所用的actor都是自带GPS传感器的,也就是SELF-Sensor,可以输出自身对应的信息。如下:
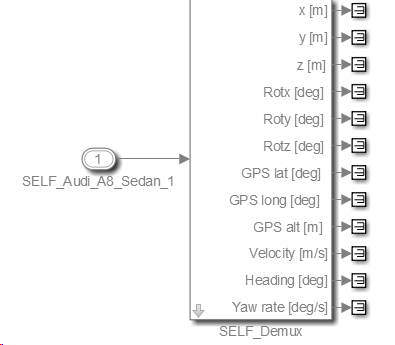
然而也并不是所有的东西都会有Self-sensor,只有Actor会有,object没有。这是很重要的一个区分。
其次Idealized Sensor提供了AIR Sensor,IR Beacon,IR OBU,RF Beacon,RF OBU五种传感,对应的解释如下:
AIR的意思是actor information receiver,即执行器的信息接收器,主要作用是用来做目标检测,既然是目标检测,确定目标所需要的信息则应该全部具有,如相对距离、角度等等,除此之外,AIR还提供了三种检测方式:BBox,Center,CoGnitive。AIR的缺陷是不考虑重叠遮挡,检测可能落在被检测物体外面。
PreScan中V2X的通信传感之一是使用DSRC通信,通信主要的媒介是Beacon和OBU,Beacon是灯塔,信号塔,OBU是on board unit(车载单元),两者搭配可进行短距离通信,一般也搭配进行使用。通信的两种主要方式是RF(Radio-frequency:无线电频率)和IR(Infra-red:红外线),两种方式也有对应的优缺点,如下:
| RF | IR |
| fast | slower |
| no obstructed view (no occluded objects) | obstructed view (occluded objects) |
两种方式就对应着Idealized Sensor剩余的传感:IR Beacon,IR OBU;RF Beacon,RF OBU
Detailed Sensor
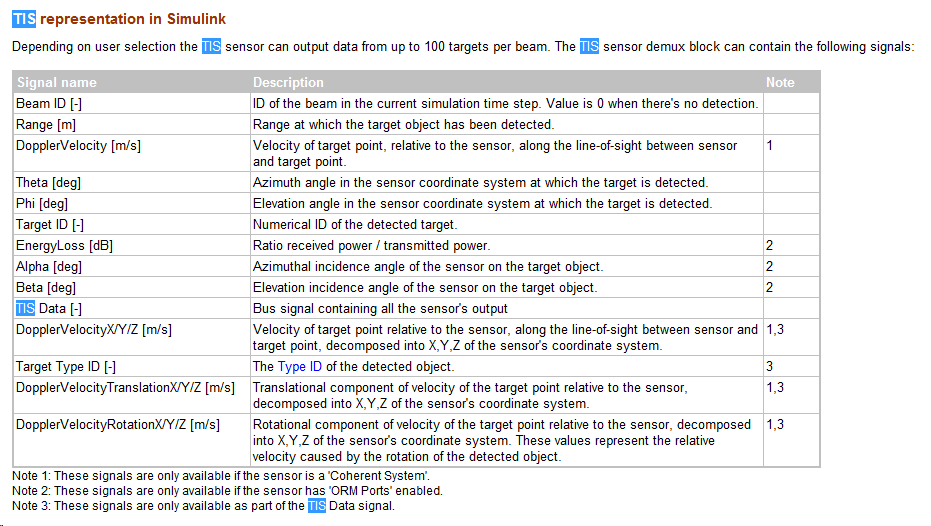
该类型中包含了实际应用中使用的三雷达(Lidar激光雷达/Radar雷达,一般指毫米波雷达/Ultrasonic超声波雷达)一相机。为了提供超广角的视角,PreScan还提供了鱼眼相机。以上都比较容易理解和使用。值得注意的是PreScan还提供了TIS,TIS是是一种通用的主动扫描传感器,在help中解释为active scanning sensor,TIS可以帮助使用者使用和理解active scanning sensor。它并不是依赖于某一种雷达的技术,而是一种根据这些雷达的通用原则设计的扫描型传感,三种雷达无论是哪一种,本质上都是对周围环境进行扫描,区别在于扫描的方法不同,即在于是使用激光、毫米波还是超声波。因此TIS的全称是Technology Independent Sensor。使用时需要注意TIS的输出很多,最多可以在一束光柱中输出100个目标的数据,根据需要可以输出不同的signal。如下:
GTS(Ground Truth Sensor真值传感)不用多说了,是一种依赖于建模过程的理想传感。
2019.03.26
最后
以上就是深情滑板最近收集整理的关于PreScan中Sensor的理解的全部内容,更多相关PreScan中Sensor内容请搜索靠谱客的其他文章。








发表评论 取消回复