文章目录
- 前言
- 1. 泊车系统介绍
- 1.1 泊车任务
- 1.2 关键 Use Cas--车位类型
- 1.3 关键 Use Cas--环境条件
- 1.4 泊车过程描述
- 1.5 泊车状态操作和用户接口定义
- 1.6 硬件设置--Linux PC
- 1.7 数据收集
- 2. 泊车算法概览
- 2.1 感知--基本框架
- 2.2 感知--理论代码实践
- 2.3 感知—学习资料汇总
- 2.4 定位—建图--CAN Odometry
- 2.5 定位—建图 GridMap Slam
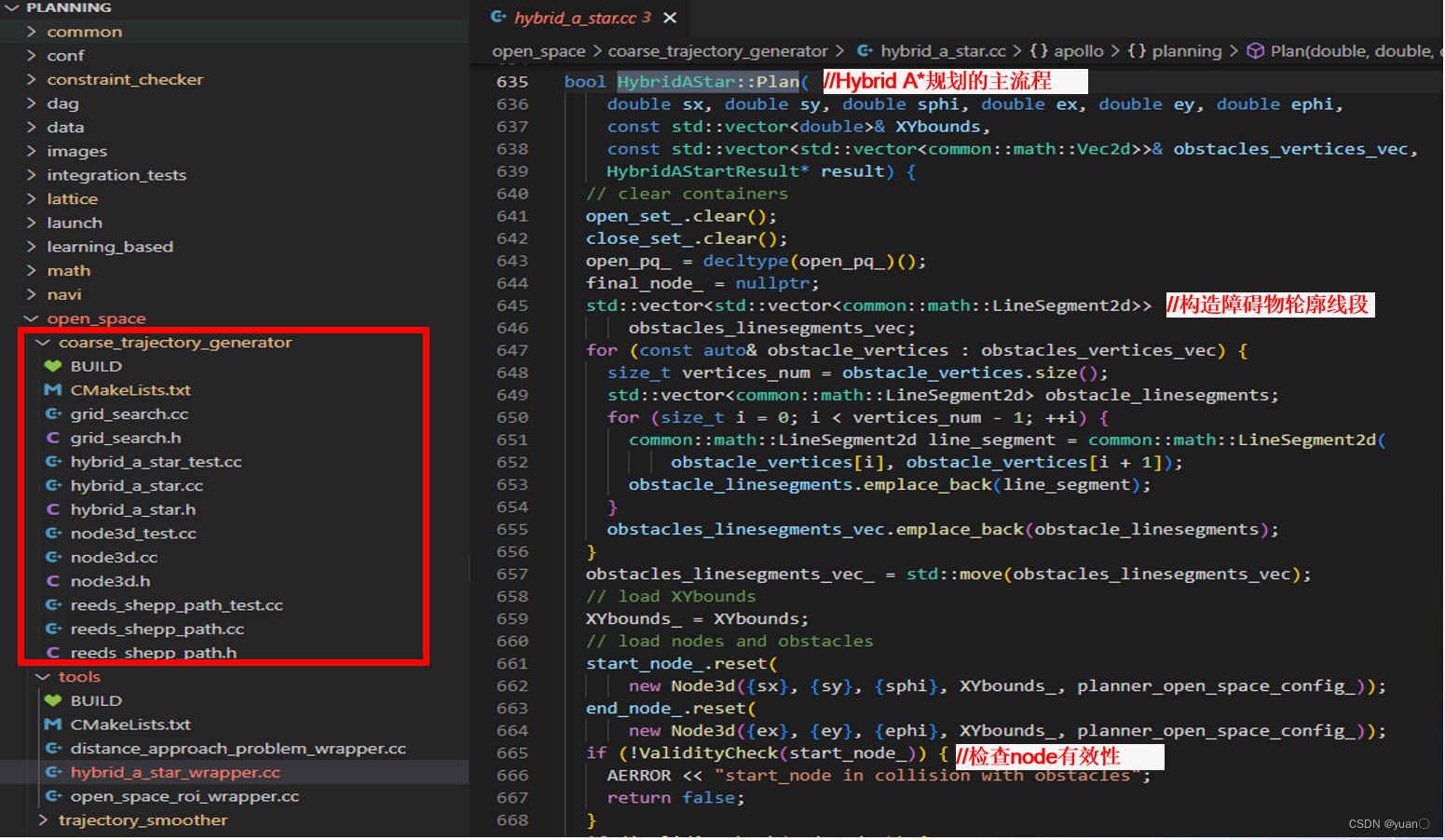
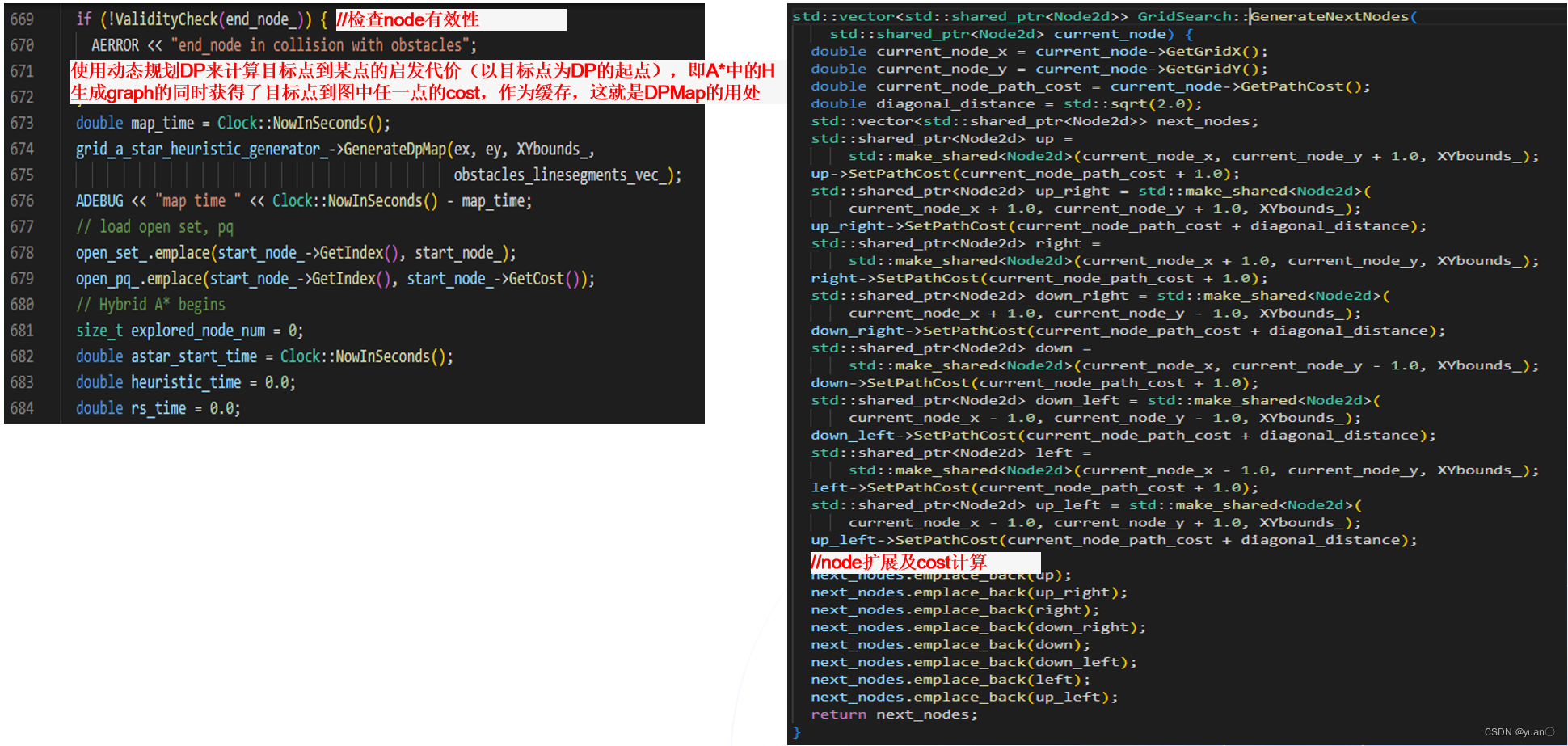
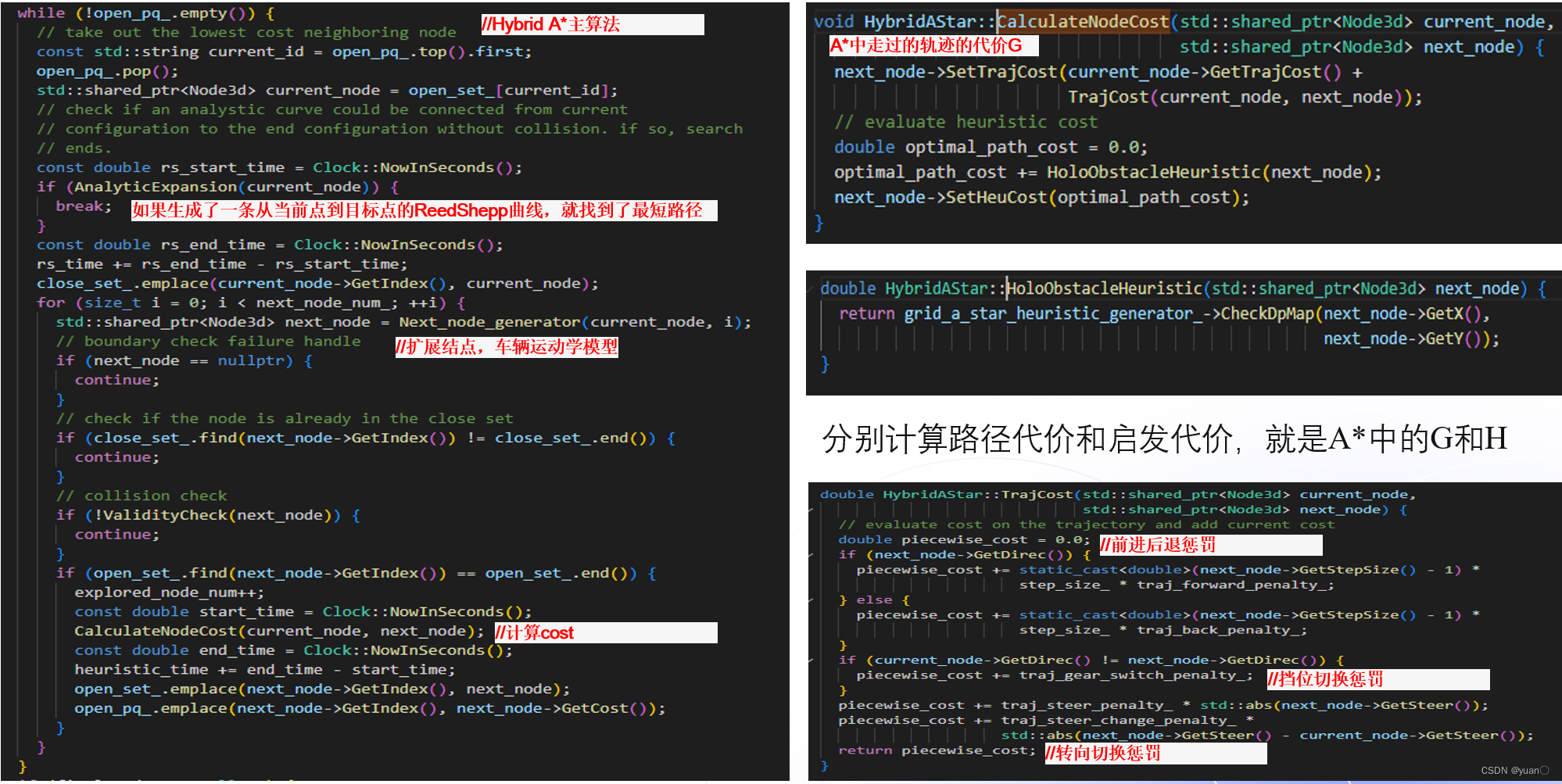
- 2.6 路径规划 hybrid a star && reed sheep
- 3. Planning框架介绍
- 4. 实训示例
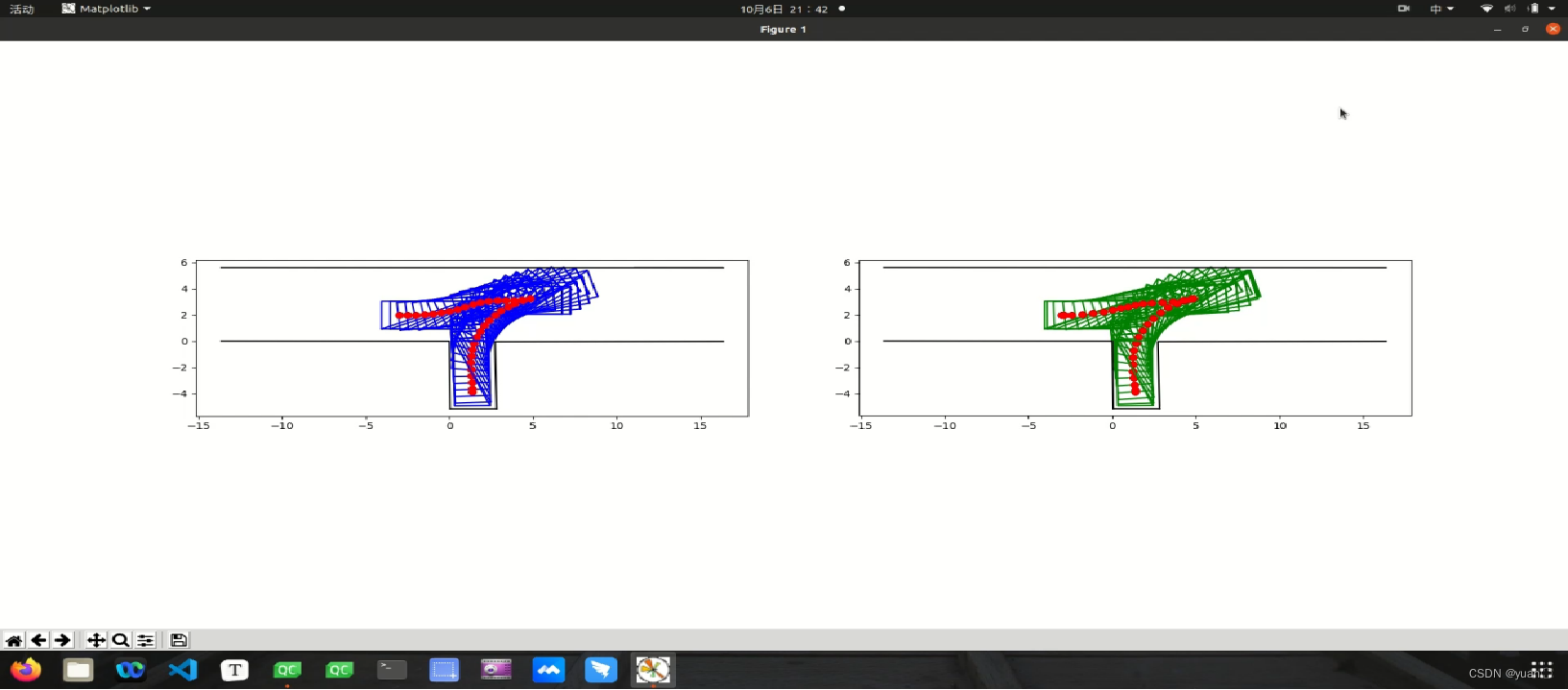
- 4.1 泊车路径规划显示
- 4.2 静态障碍物绕行
- 4.3 垂直泊车
前言
Apollo星火计划课程链接如下
星火计划2.0基础课:https://apollo.baidu.com/community/online-course/2
星火计划2.0专项课:https://apollo.baidu.com/community/online-course/12
1. 泊车系统介绍
1.1 泊车任务
全自动泊车通过360环视(四个鱼眼摄像头)和12个超声波雷达搜索车辆周围环境,寻找其他停放车辆之间适当停车位或地面车位标记(如车位线等),并根据驾驶员的选择自动或手动确定目标车位,计算自动泊车轨迹,并发送横向及纵向控制命令,引导车辆停放在目标泊车位置,并达到一定的位置精度要求。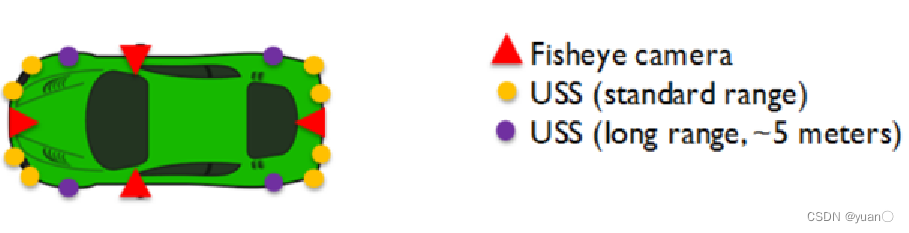 可开发泊车的车辆有轿车、SUV、MPV、卡车等。
可开发泊车的车辆有轿车、SUV、MPV、卡车等。
参考IS0 20900:部分自动停车系统(PAPS).性能要求和试验程序
Type1:系统由位于驾驶员座椅的常规驾驶员监督。
Type2:系统由远程驾驶员(在车内或车外)监控,不一定位于驾驶员座位上,车辆保持在远程驾驶员的视线范围内
1.2 关键 Use Cas–车位类型
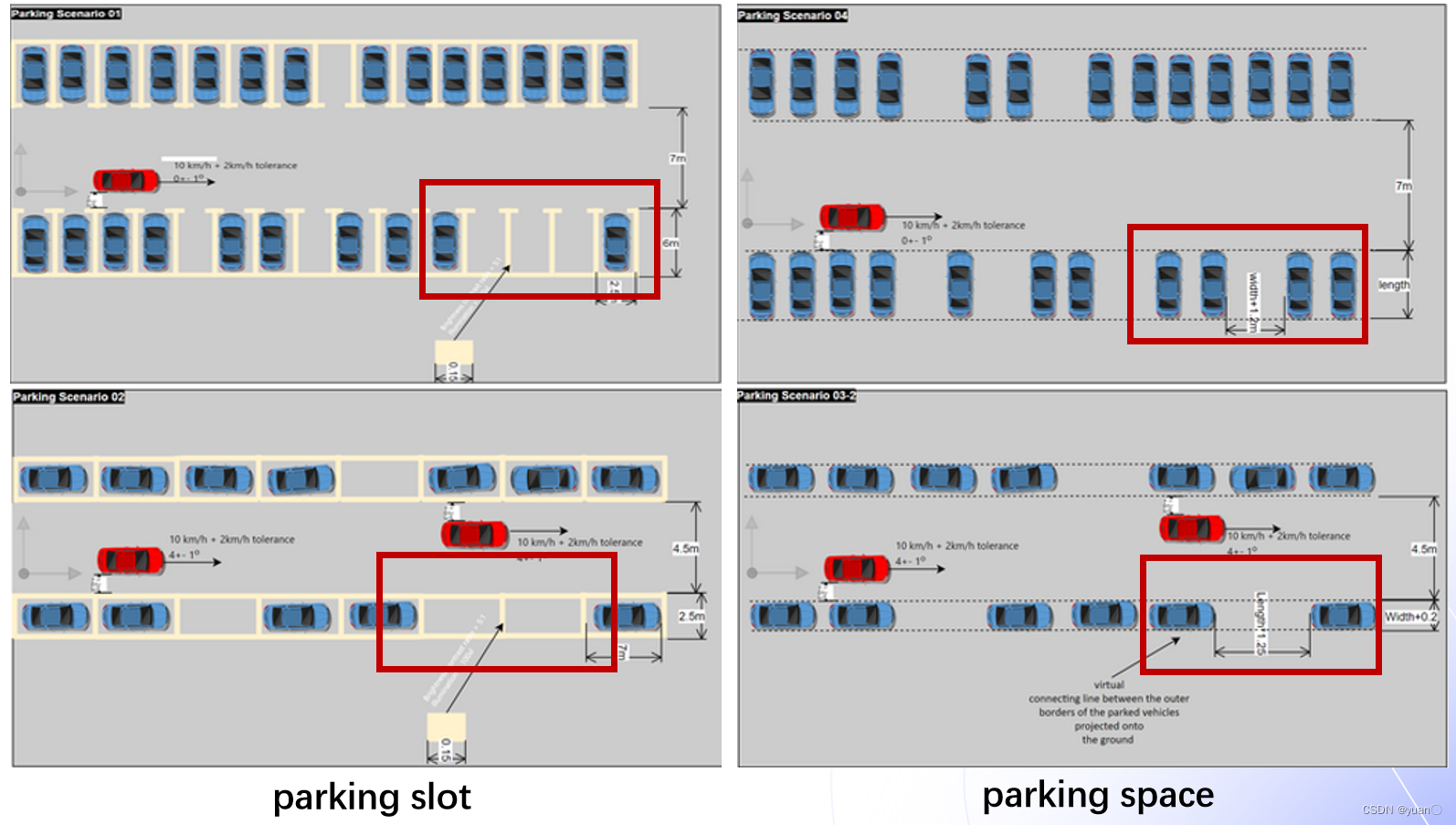
parking slot与parking space的区别就是一个有车位线,另一个没有。基于计算机视觉和超声波雷达进行检测。
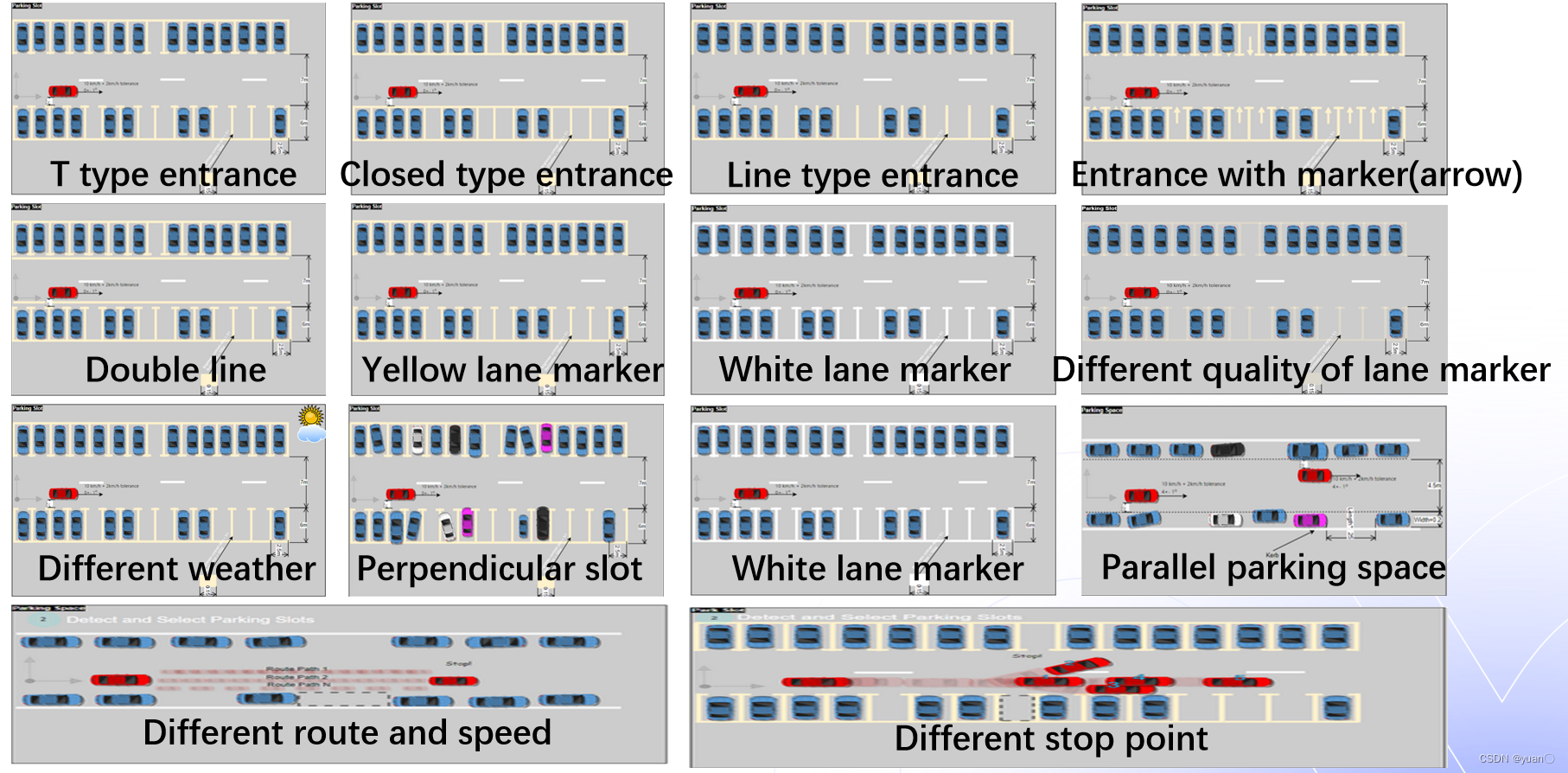
1.3 关键 Use Cas–环境条件
- 不同类型的停车位,具有不同的车道标记
- 不同颜色的车位
- 不同质量的车位
- 不同光照度和气候条件
- 不同的停车场布局
- 不同的路线路径和速度曲线
- 不同的泊车起始点和终点
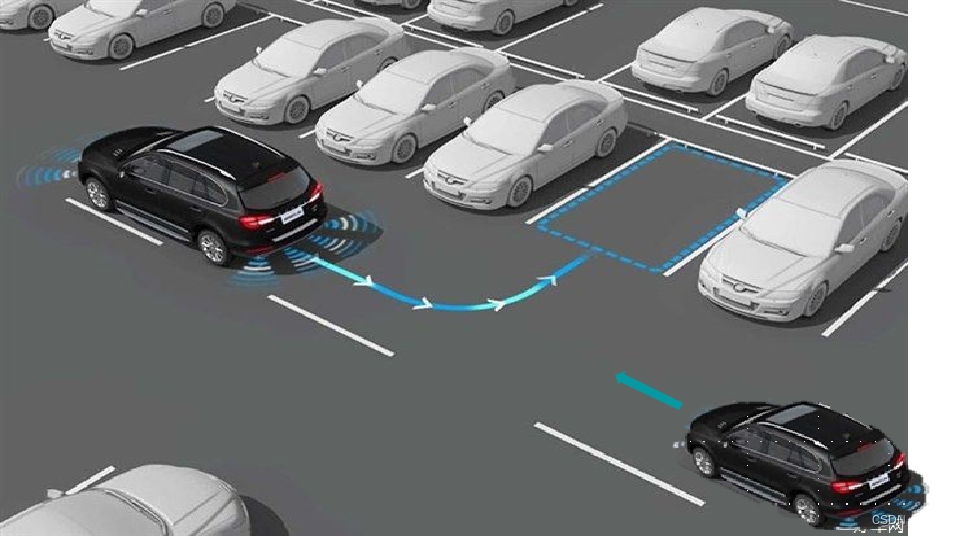
1.4 泊车过程描述
 首先激活泊车系统,检测并寻找车位,找到车位之后,进行路径规划以及相应的控制,这过程中解放了人的手与脚。当遇上障碍物或者行人时,泊车系统可以及时使车辆停止,以防碰撞。最后达到停车的目的。
首先激活泊车系统,检测并寻找车位,找到车位之后,进行路径规划以及相应的控制,这过程中解放了人的手与脚。当遇上障碍物或者行人时,泊车系统可以及时使车辆停止,以防碰撞。最后达到停车的目的。
1.5 泊车状态操作和用户接口定义
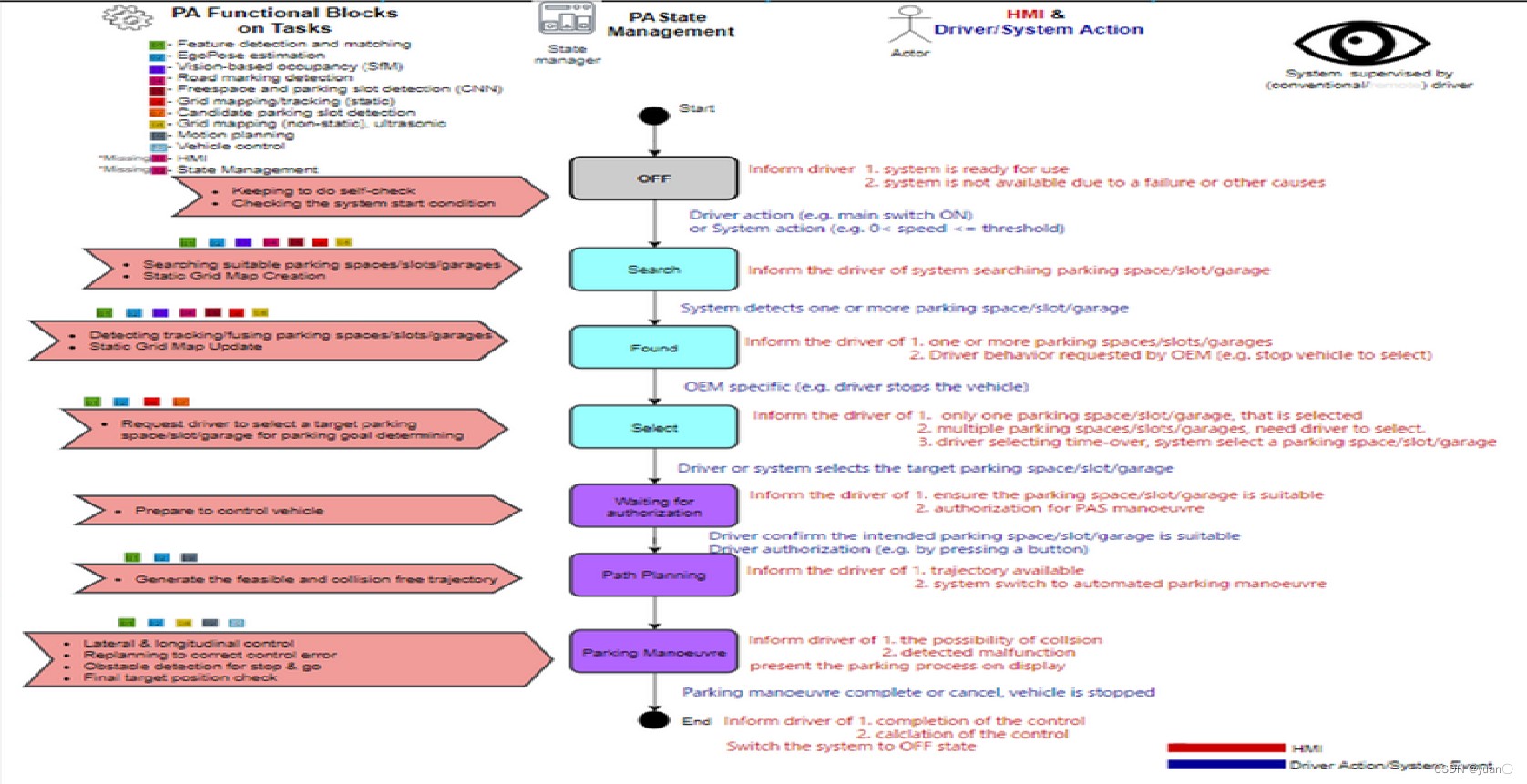 泊车的主要功能分为:环境感知模型(基于计算机视觉的角点检测和基于Freespace and parking slot detection(CNN))、不同的路径规划方式(Apollo 提供的hybrid Astar)、gridmap 的建立、控制方式(LQR)…
泊车的主要功能分为:环境感知模型(基于计算机视觉的角点检测和基于Freespace and parking slot detection(CNN))、不同的路径规划方式(Apollo 提供的hybrid Astar)、gridmap 的建立、控制方式(LQR)…
泊车的流程:寻找车位,车位确认,等待驾驶员授权,泊车。
泊车交互——HMI、驾驶员行为。
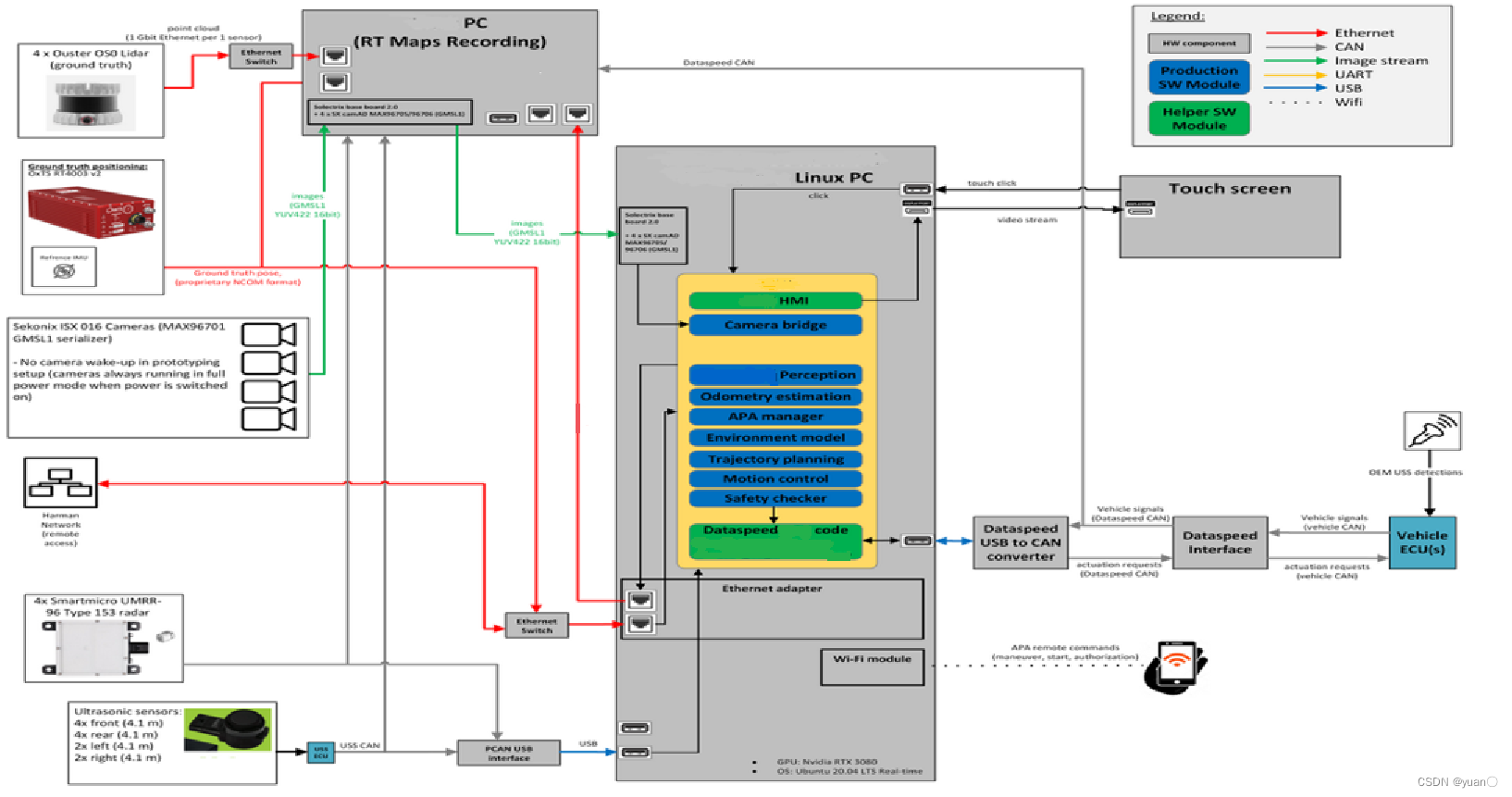
1.6 硬件设置–Linux PC
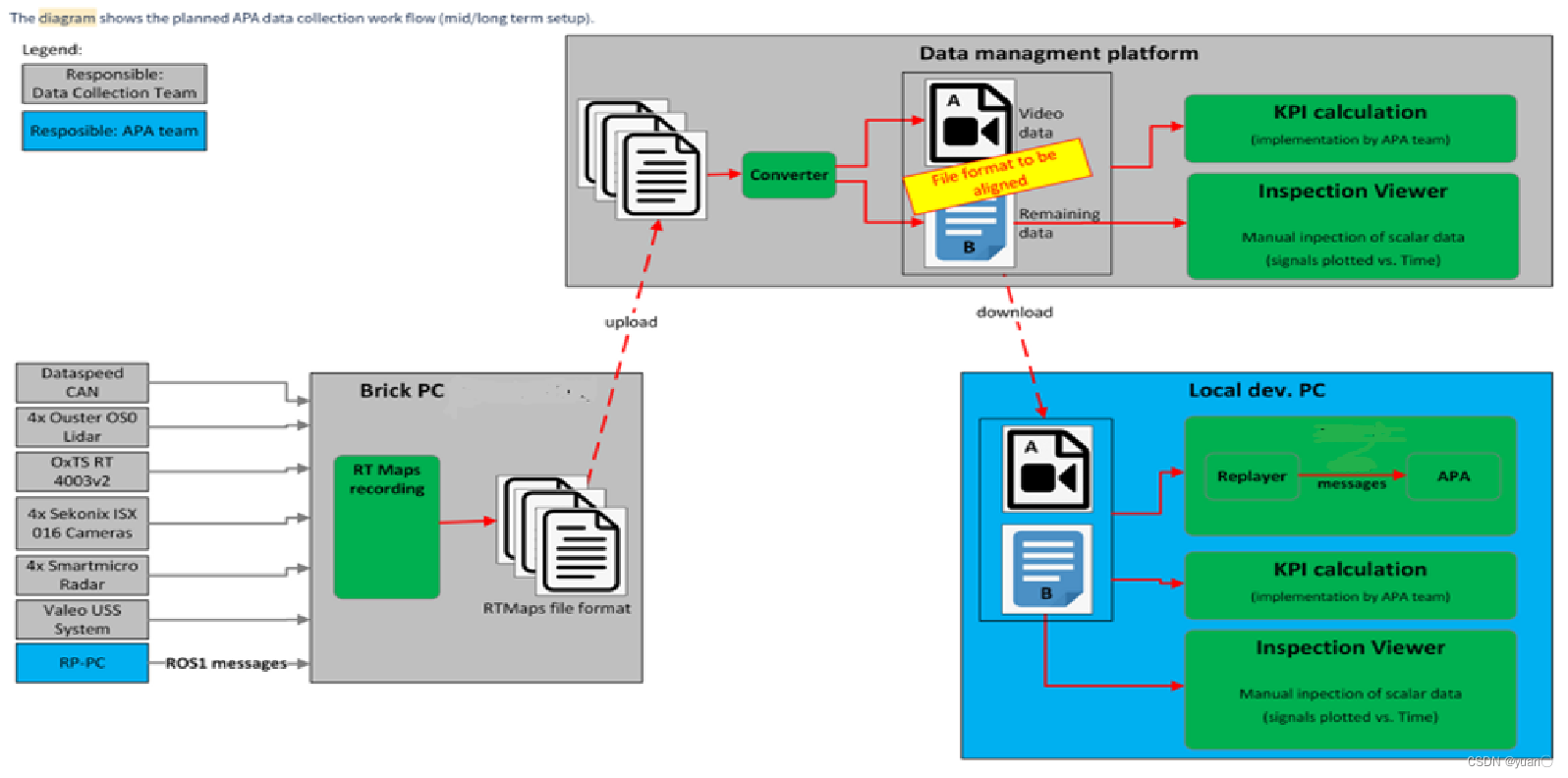
1.7 数据收集
2. 泊车算法概览
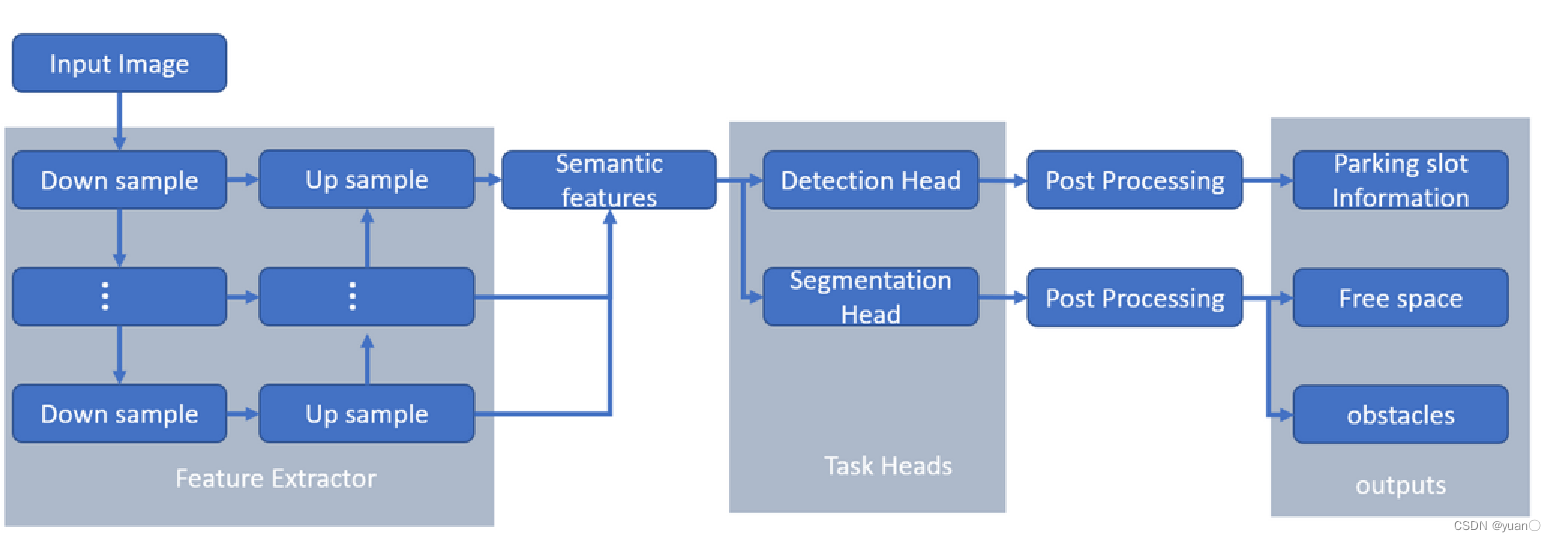
2.1 感知–基本框架
2.2 感知–理论代码实践
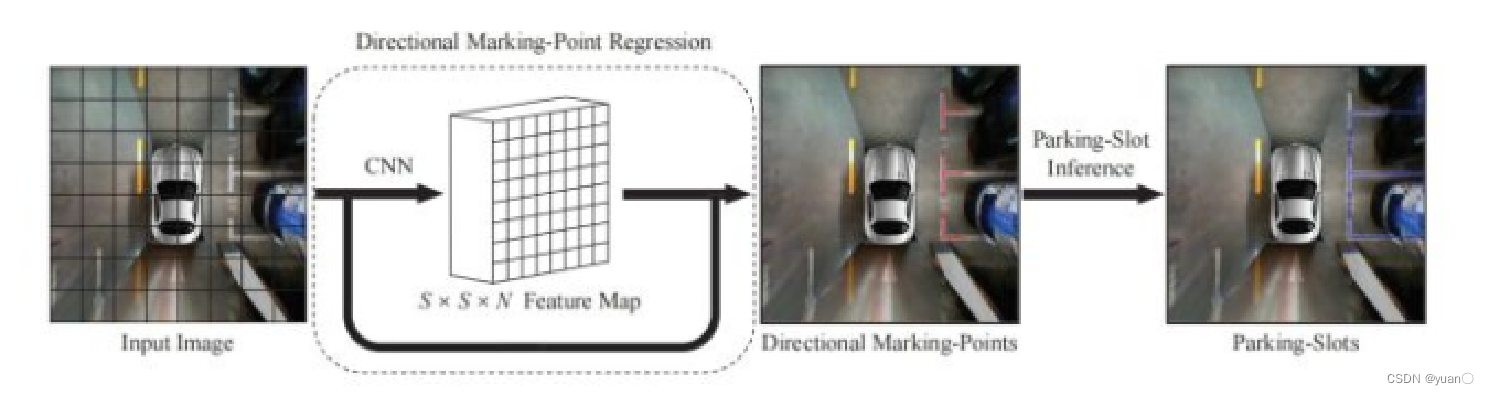
论文出处: “DMPR-PS: A Novel Approach for Parking-Slot Detection Using Directional Marking-Point Regression.” 2019 IEEE International Conference on Multimedia and Expo (ICME). IEEE, 2019.
同济大学:https://github.com/Teoge/DMPR-PS
2.3 感知—学习资料汇总
2.4 定位—建图–CAN Odometry
背景和范围
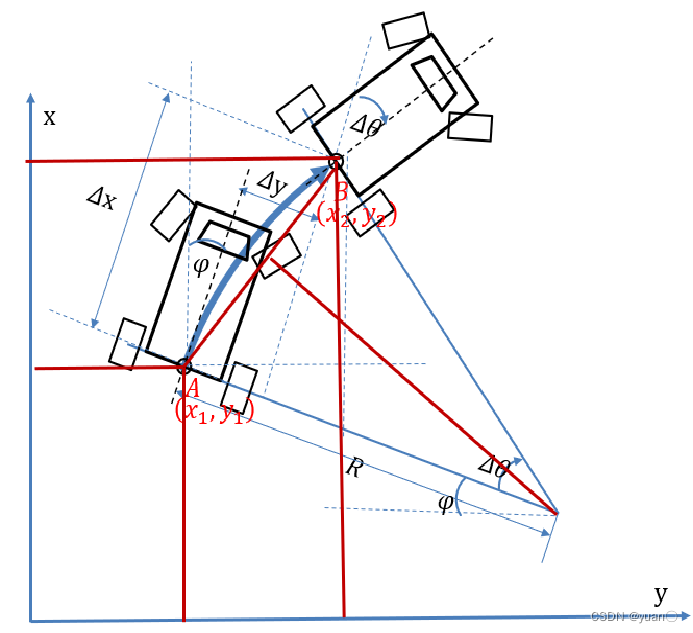
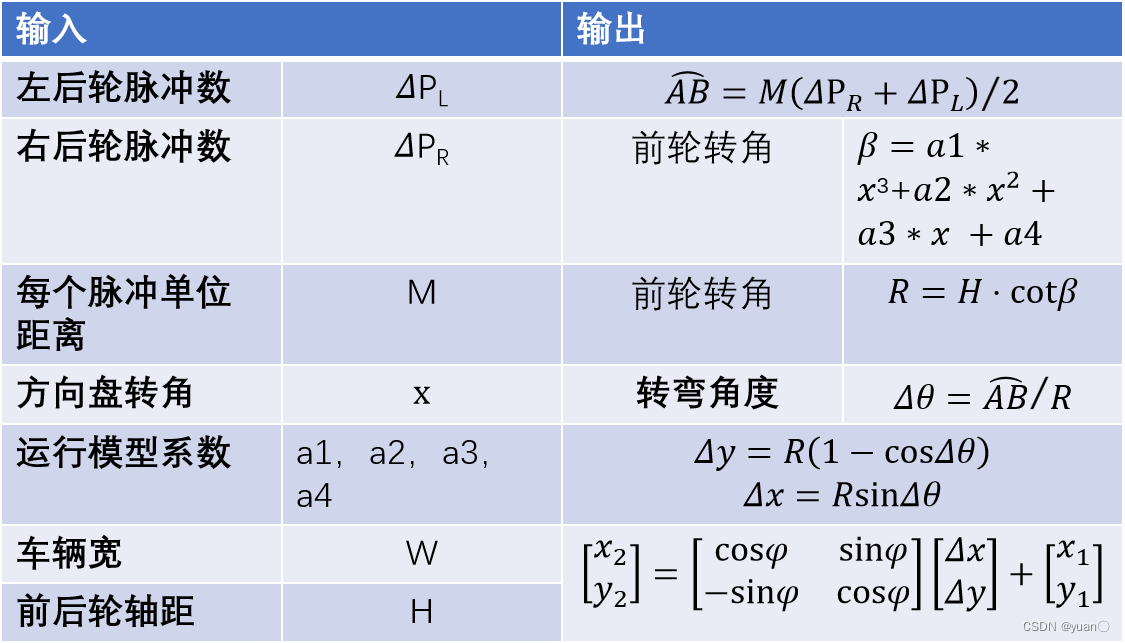
DR(dead reckoning)根据轮速或车轮脉冲,方向盘转角和车轮转角的对应关系可以推算出车相对于
初始位置和姿态,可以对目标和车辆自身提供定位信息。
标定
获取尽可能准确的车辆运动模型,确定方向盘转角和车辆转弯半径的对应关系。
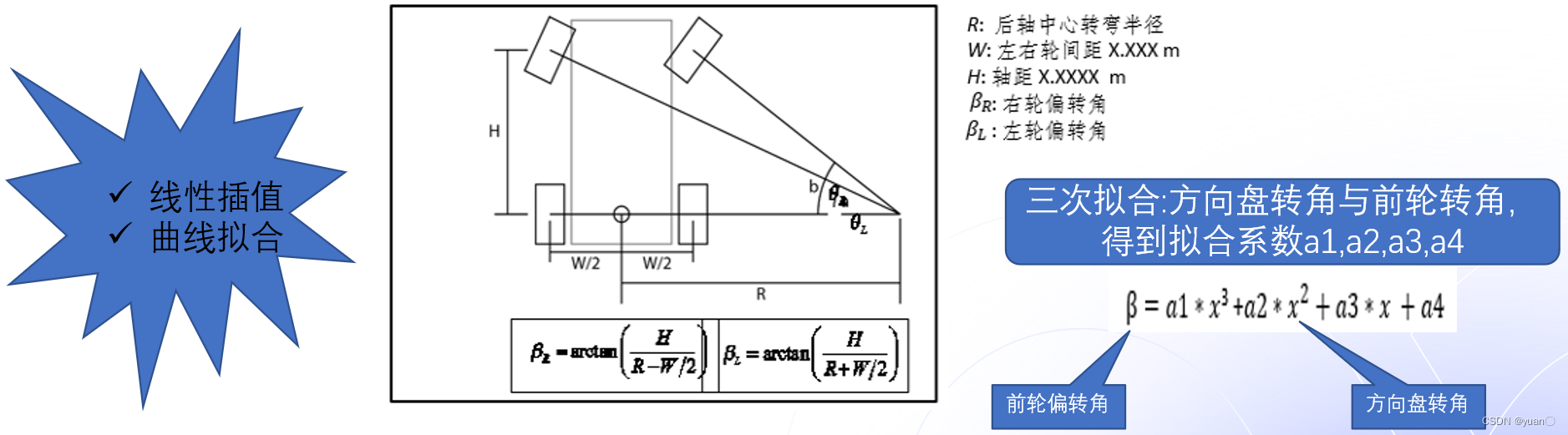 方向盘转角与前轮转角之间的关系可以通过线性插值或曲线拟合的方式得到。
方向盘转角与前轮转角之间的关系可以通过线性插值或曲线拟合的方式得到。
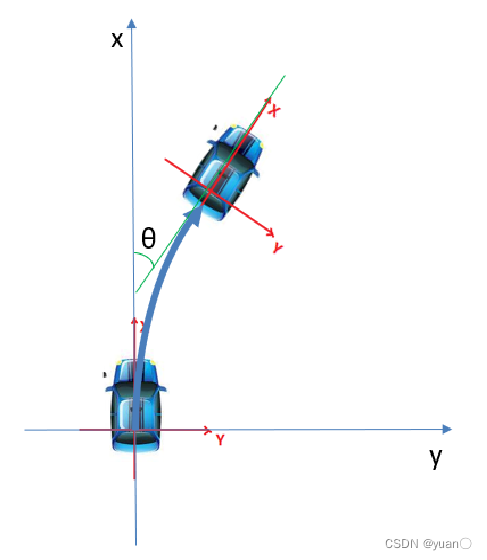
DR输出的世界坐标系及车辆坐标系如下图,车辆角度为两个坐标系X方向的夹角,顺时针为正,逆时针为负。
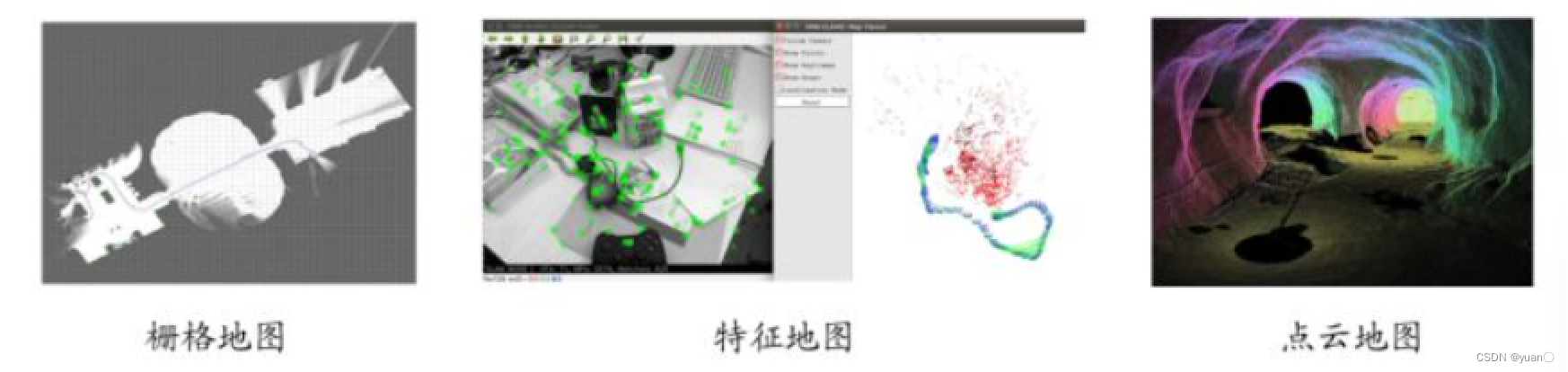
2.5 定位—建图 GridMap Slam
尺度地图:具有真实的物理尺寸,如栅格地图、特征地图、 点云地图;常用于地图构建、定位、SLAM、小规模路径规划。
语义地图:加标签的尺度地图,SLAM和深度学习相结合。
2.6 路径规划 hybrid a star && reed sheep
2010年,斯坦福首次提出一种满足车辆运动学的算法(Hybrid A*),并在(DARPA)的城市挑战赛中得以运用.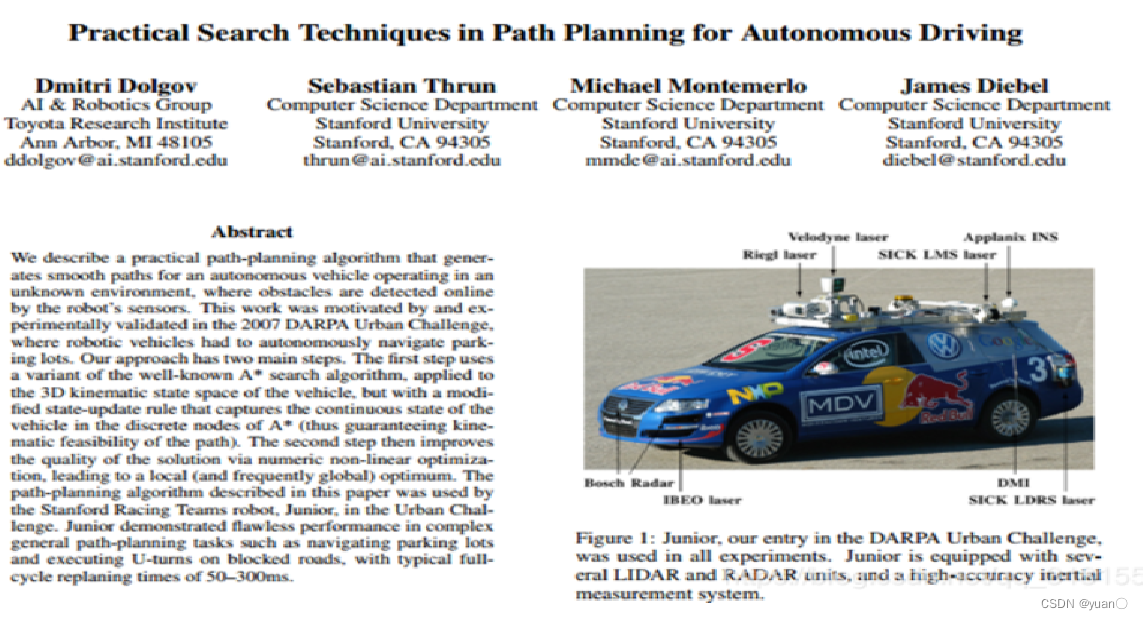
3. Planning框架介绍
4. 实训示例
云实验地址——Apollo规划之障碍物借道绕行仿真调试
4.1 泊车路径规划显示
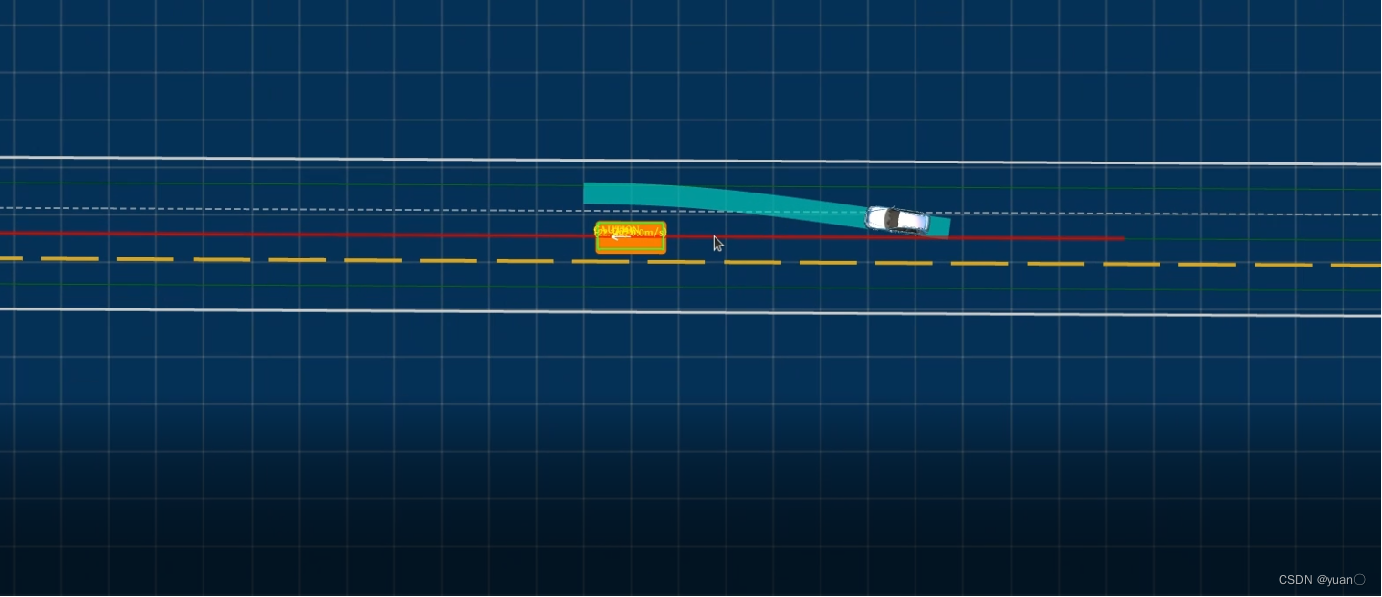
4.2 静态障碍物绕行
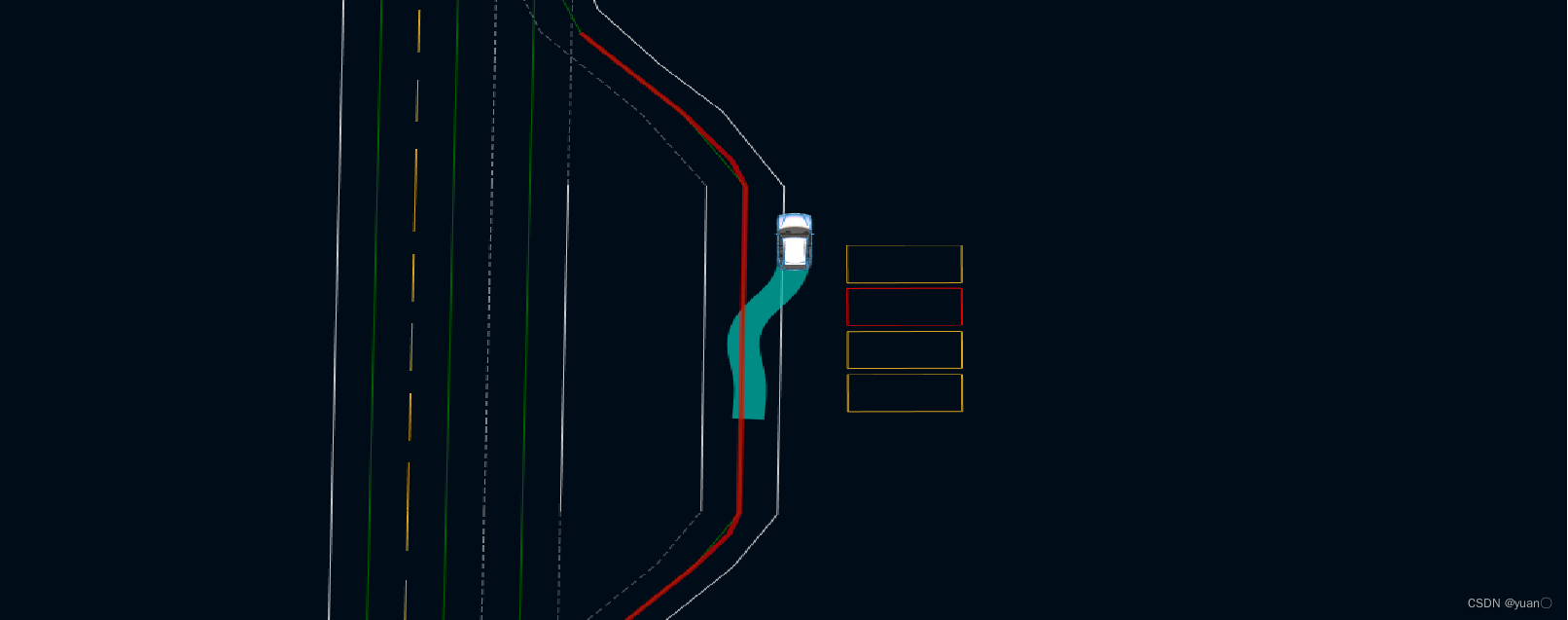
4.3 垂直泊车
最后
以上就是端庄柠檬最近收集整理的关于Apollo星火计划学习笔记——第七讲自动驾驶规划技术原理2前言1. 泊车系统介绍2. 泊车算法概览3. Planning框架介绍4. 实训示例的全部内容,更多相关Apollo星火计划学习笔记——第七讲自动驾驶规划技术原理2前言1.内容请搜索靠谱客的其他文章。








发表评论 取消回复