事先准备:
1. 安装2015a 以上的 Matlab (推荐使用2018a 以上的版本)
2. 安装Robotics System Toolbox
Matlab的菜单栏,单击附加功能
弹出窗口,搜索Robotics System Toolbox,根据提示安装即可。
开启正式的学习(一)通讯设置
一、Matlab部分
使用如下命令即可使Matlab 与运行roscore 的主节点服务器进行通讯

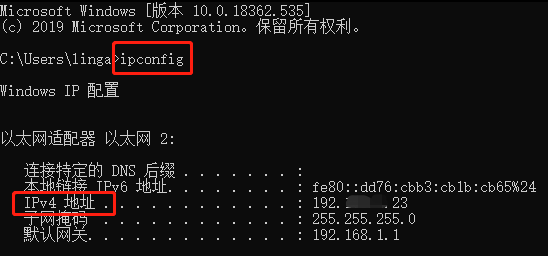
Windows系统下:查看IP地址。
Linux 系统下:查看ip地址 ifconfig
断开Matlab的ROS通讯使用命令: rosshutdown
注意:一个Matlab 只能运行一次rosinit ,这和一个ROS网络环境只能运行一个roscore 是同一个意思。所以 若想更换Matlab 的主节点ip 只能先断开通讯,重新设置运行rosinit
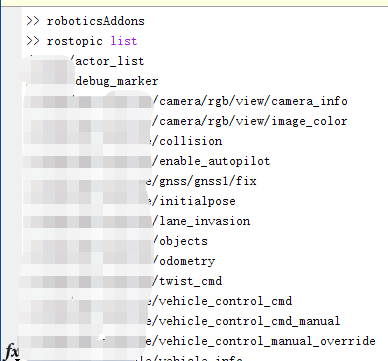
在命令行窗口运行rostopic list 查看主节点服务器发布是ROS 话题
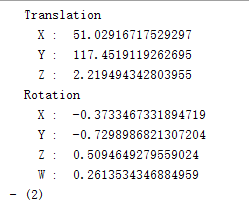
使用 rostopic echo 看是否可以正常读取话题数据
![]()
二、Simulink部分
Simulink是模块化工具,不需要坚实的语言基础就可以很快上手。
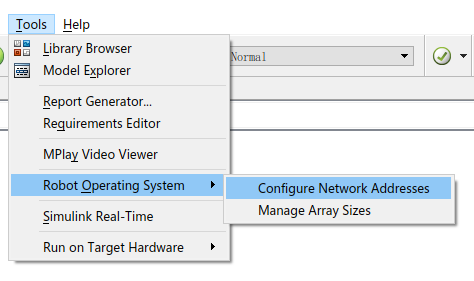
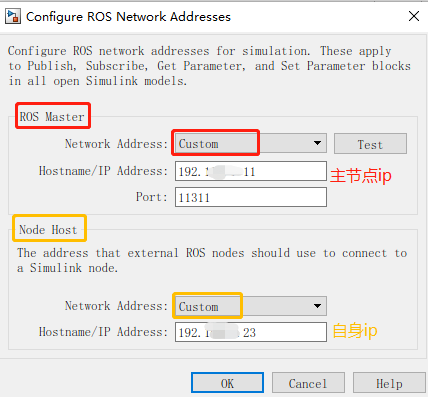
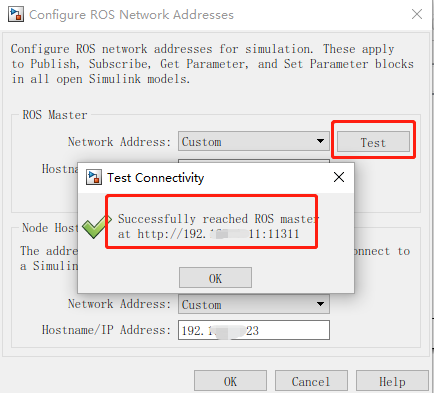
测试通讯是否正常
最后
以上就是畅快大白最近收集整理的关于关于Matlab/Simulink 中ROS学习总结(一)通讯设置的全部内容,更多相关关于Matlab/Simulink内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复