我读啥了自己看标题(今天头疼的厉害,呜呜呜/(ㄒoㄒ)/~~)
1 介绍
之前研究标定SLAM精度的关键是信息点的选择(典型地,角点或边缘点)和相机Pose与地标位置的联合优化。与将地图构建和相机姿态估计分离的密集方法相比,稀疏 SLAM 产生更准确的结果。在实际应用中,稀疏 SLAM 通常与其他传感器融合以提高鲁棒性。然而,稀疏特征图没有视觉信息,不能直接用于无碰撞运动规划或表面感知 AR 等任务。许多方法都尝试同时实现密度映射(dense mapping)和相机自主定位,但是不如稀疏方法效果好,有两点原因:
- dense图像对其易受到光度噪声的影响。
- 大量场景参数限制了实时联合优化。
作者提出了 CodeMapping,这是一种利用稀疏 SLAM 提供的几何先验信息的实时密集映射方法,扩展了 CodeSLAM 中提出的紧凑场景表示以生成稀疏点集。
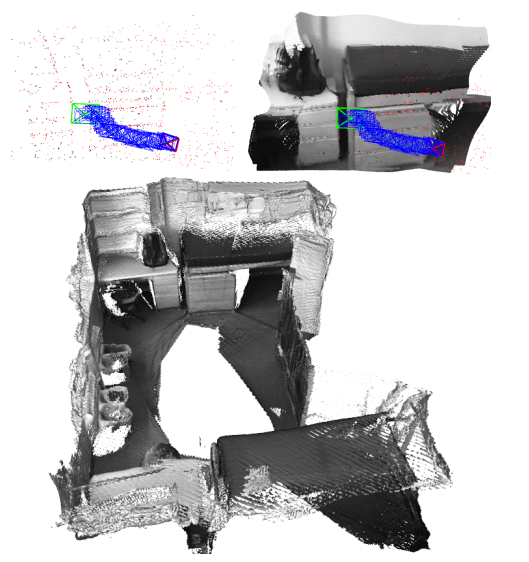
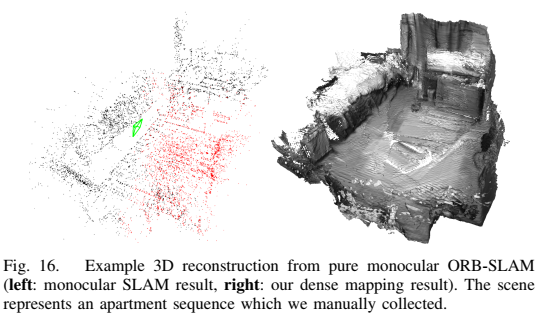
下图左是一个稀疏点云,右是作者重建出的稠密点云,下是整个场景的点云。
2 系统总览
作者使用一个ORB-SLAM3作为一个稀疏SLAM系统,因为它能够提供多模传感器输入并由SOTA的效果。
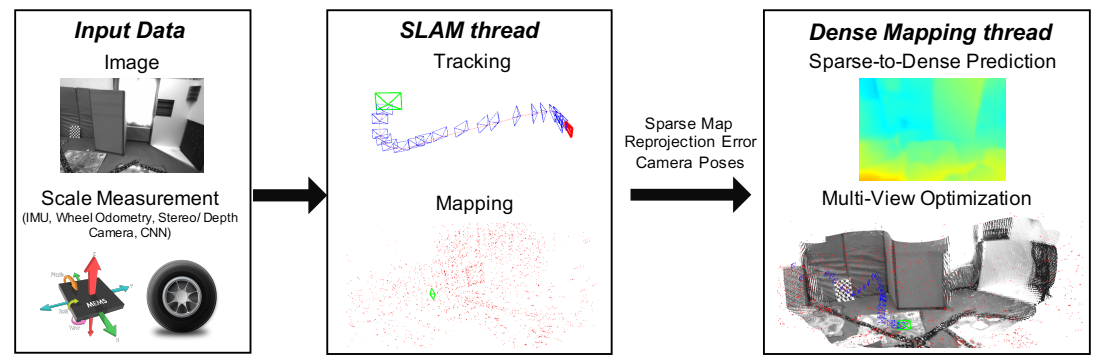
跟踪。跟踪使用传感器信息来估计相机相对于map的位姿,ORB-SLAM3执行仅有pose的BA,最小化匹配的投影误差,这个投影误差由当前图像和重建出的map得到。系统会自动决定这帧图像是不是关键帧。
Mapping。用于位姿和集合的精炼。关键帧数据包含相机pose,稀疏深度和再投影误差。其中稀疏深度是3Dlandmark再关键帧上的投影。投影误差是每一个3D landmark再所有帧上面的投影算出的误差的平均值。
稀疏到稠密的预测。利用深度学习预测出更稠密的深度图。
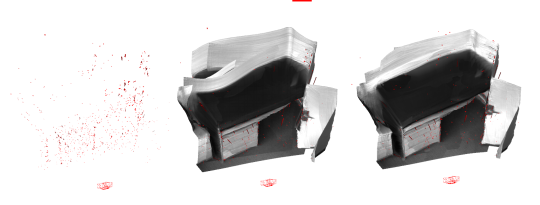
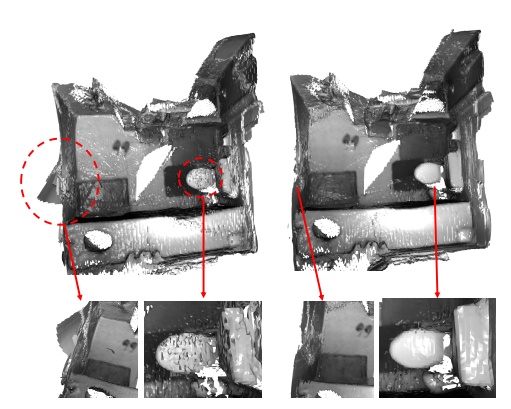
多视角优化。主要是增大depth的精度,后面细讲。下图给出了多视角优化的有效性。
3 稀疏到稠密的预测
3.1 网络结构
作者扩展了条件变分自动编码器 DeepFactors,网络如下图所示。网络输入有三种:灰度图,稀疏深度depth和重投影误差maps。与Code SLAM和DeepFactors相似,depth和重投影误差值归一化在[0,1]之间。输入的三个数据可以concat为一个3通道的输入。
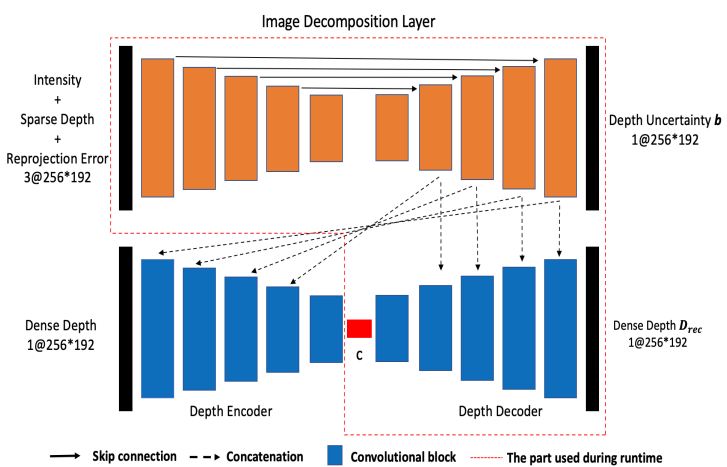
下层网络是一个变分自动编码器(VAE),由分解特征调节的网络。这个网络会生成一个潜在的特征
c
c
c,稠密的深度图预测
D
D
D和一个不确定性图
b
b
b。损失函数由一个深度重建loss和一个KL散度loss构成。其中深度图重建的loss定义为,x表示每一个像素点。若-
∑ x ∣ ∣ D ( x ) − D g t ( x ) ∣ ∣ b ( x ) + l o g ( b ( x ) ) sum_{x}dfrac{||D(x)-D_{gt}(x)||}{b(x)} + log(b(x)) x∑b(x)∣∣D(x)−Dgt(x)∣∣+log(b(x))
3.2 训练过程
使用ScanNet数据集中的40w张图片。为了生成输入需要的稀疏depth,在彩色图上利用ORB检测关键点,之后从这先点中从Kinect 深度图中选择1000个关键点。VAE的输入是Kinect生成的原始depth。生成的场景的3D模型投影到当前图像得到的depth作为真值,用于计算loss。
4 多视角优化
提出了几个系数,实际上就是利用自己提出的这几个优化函数,利用DeepFactor的方法进行优化。这几个系数实际上也很常见。
光度系数。这个原理很简单,根据depth和两帧图像之间的变换关系,可以将一个图像warp到另一个图像上,直接做差求和即可。
再投影稀疏。两组图像上有个匹配好的点,利用深度depth和pose,将图像上的一个点投影到另一个图像上,计算两个坐标的差异。
稀疏几何系数。这个就是将两个图像的depth统一到一个图像坐标系下,然后直接算depth的差异。
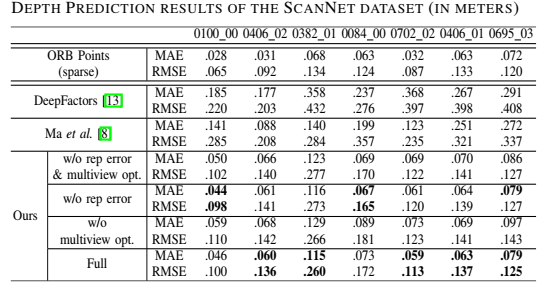
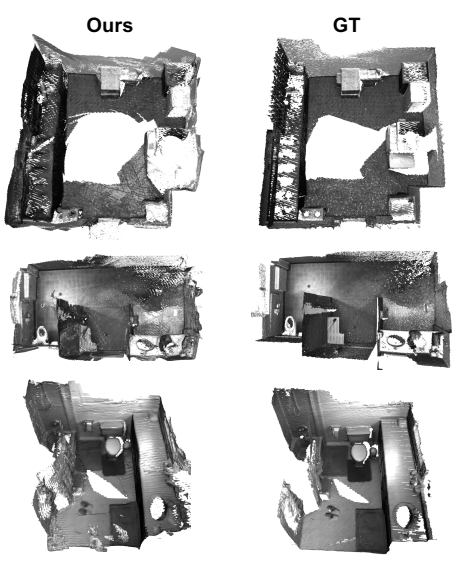
5 结果图
6 总结
作者说,在未来的工作中,mapper可以扩展到使用语义分割和实例分割来实现更多信息的三维映射。
从结果上来看,效果真的不错,但是利用多张图像预测pose 和depth本身网络种类就很多,尽管作者用了很多辅助信息作为输入,但是网络结构看起来有点简单。所以可能泛化性存在一些问题,期待作者能开源,放自己数据集上试试。
(今天状态不佳,论文写的乱乱的,嘤嘤嘤つ﹏⊂)
最后
以上就是纯情河马最近收集整理的关于论文阅读 2021 —— CodeMapping: Real-Time Dense Mapping for Sparse SLAM using Compact Scene1 介绍2 系统总览3 稀疏到稠密的预测4 多视角优化5 结果图6 总结的全部内容,更多相关论文阅读内容请搜索靠谱客的其他文章。








发表评论 取消回复