1、超声波雷达介绍
超声波雷达的工作原理是通过超声波发射装置向外发出超声波,到通过接收器接收到发送过来超声波时的时间差来测算距离。
特性一:温度敏感
特性二:无法精确描述障碍物位置(接收到的只是距离,并不知道具体方向)
雷达探测范围数字模型:
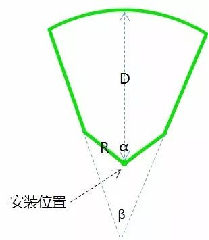
参数α:超声波雷达的探测角
参数β:检测宽度范围影响因素之一,UPA的β角为20°左右,APA的 β角比较特殊,为0°。
参数R:检测宽度范围影响因素之一,UPA和APA的R值差别不大, 都在0.6m左右。
参数D:超声波雷达的最大量程。UPA的最大量程为2米~2.米,APA 的最大量程至少是5米,目前已有超过7m的APA雷达在业内使用
2、车位探测超声波雷达装载方案
汽车超声波类装配方案多为前后向共8个UPA,左右侧共4个APA。UPA主要应用于车前后障碍物检测,APA主要应用于车侧障碍物检测。工作频率:48kHz+2kHz

在车位探测中,主要是左右侧共4个APA其探测作用。
3、车位识别技术

车位检测基本原理:汽车经过空车位时,传感器检测到的距离值会发生两次跳变

技术难点:
1、测出的车位长度不稳定
2、室内室外测量差异较大
3、车速、车身角度对测量结果也会造成影响
4、参考方案
(1)Hough Transform for Parking Space Estimation Using Long Range Ultrasonic Sensors(2006)

1、Find the strongest line
2、Select all line with the same or nearly the same θ as the strongest line found above
3、Pick the two strongest lines out of the selection
(感觉并不能满足要求,但其应用huogh transform 找到的两条线也许能为信号降噪提供思路)
(2)Parking Space Detection Using Ultrasonic Sensor in Parking Assistance System(2008)

R2 -R1 >Threshold :Edge
R2 -R1 Threshold : Plane
(其采用的是多回波超声波,依据回波的差值判断探测范围是否是平面或者边缘)
(3)联创汽车(2017)
1、联创开发的自适应滤波算法,优化信号输入。
2、搭建车位识别补偿模(Compensation module)。
3、对已有的波形进行分类计算后,对车位状况进行分类。
(该方法基本满足需求,但技术细节未公开)

最后
以上就是平常便当最近收集整理的关于超声波雷达介绍及车位探测信号处理方法1、超声波雷达介绍2、车位探测超声波雷达装载方案3、车位识别技术4、参考方案的全部内容,更多相关超声波雷达介绍及车位探测信号处理方法1、超声波雷达介绍2、车位探测超声波雷达装载方案3、车位识别技术4、参考方案内容请搜索靠谱客的其他文章。








发表评论 取消回复