
人脸姿态估计指的是根据一幅2维的人脸图像,计算出这个人在实际3维空间中的面部朝向。问题的输入条件就是一张人脸图片,输出自然就是可以表示方位的三个旋转角度 (pitch, yaw, roll),其中 pitch 表示俯仰角(关于x轴的旋转角度),yaw 表示偏航角(关于y轴的旋转角度),roll 表示翻滚角(关于z轴的旋转角度),分别如下面 3 图所示:(说句题外话,如果我们把下面图中的物体看作是一架向我们飞来的飞机,就可以理解为何这三个角要如此命名了)



算法的思路很简单,可以考虑这样一种场景,假设我们有一张标准的3d人脸模型,如果投影和输入图片的人脸大致重合,那么此时 3d 模型的方位就可以看作是图片中人脸在实际空间中的方位了。如果投影和图像的差异很大,那我们再对 3d 模型进行旋转,平移,拉伸等操作,可以明确的是,只要经过合适的调整,总会出现两者相重合的情况。
所以现在的问题就变成了三个子问题:1. 怎样得到标准的人脸 3d 模型;2. 对 3d 模型的各种变换操作怎样从数字上体现出来;2. 如何量化的表示“重合”这一概念。
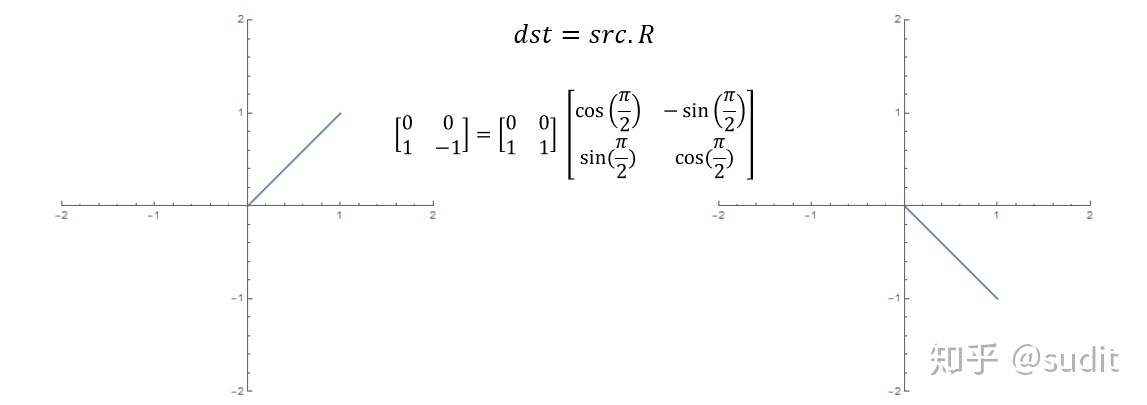
我们先来看第二个问题,在数学上,旋转、平移、拉伸操作其实都是矩阵运算,举个简单的例子,在二维平面上旋转一条线段,就是使用旋转目标 src 去乘以二维旋转矩阵,得到的 dst 便是旋转后的线段。
平移操作更简单一点,在坐标分量上加一个偏移量即可。拉伸也同理,只需要在不同的方向上乘以缩放系数。于是,空间中的一个对象,经过上述变换后,最终得到的东西由下式给出
其中 t 是平移矩阵,大小为
s 是缩放向量,具体形式为
这里的
下面我们重点讨论一下旋转矩阵
其中
于是经过变换后的模型就是
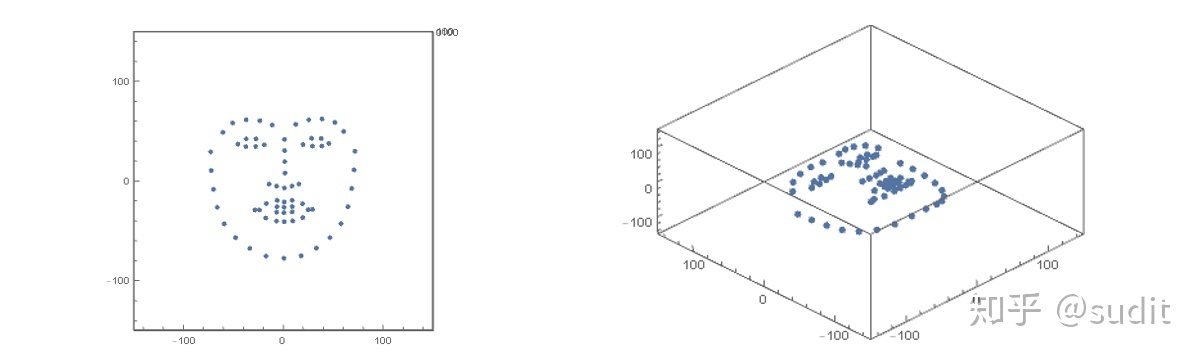
搞定了标准 3d 人脸模型的变换之后,接下来我们来解决如何量化投影与人脸图像重叠的问题。由于 3d 模型其实就是一系列点坐标,所以我们首先也应该把二维人脸图像使用点坐标来表示。关于人脸关键点检测的算法有很多,这里我们使用 dlib 框架提供的 68 点检测模型,它的标准图像如下(具体坐标在文末给出)
有了标准人脸关键点之后,我们需要对其进行空间变换,也就是前面推导的
然后再将其投影到 xy 平面上,当然这个投影矩阵比较简单,只需要提取 dst 中每个点的前两个坐标就可以了
投影后的点集合为
为了衡量投影与图片人脸关键点的重合程度,我们采用平方误差损失函数
其中
下面我们采用梯度下降法来求解,参数迭代格式为
其中
接下来,利用上述思路,我们来实际编程试验一下,由于目标函数
alpha = torch.tensor(0.0, requires_grad=True, dtype=torch.float64)
beta = torch.tensor(0.0, requires_grad=True, dtype=torch.float64)
gamma = torch.tensor(0.0, requires_grad=True, dtype=torch.float64)
lambdaX = torch.tensor(1.0, requires_grad=True, dtype=torch.float64)
lambdaY = torch.tensor(1.0, requires_grad=True, dtype=torch.float64)
lambdaZ = torch.tensor(1.0, requires_grad=True, dtype=torch.float64)
dx = torch.tensor(1.0, requires_grad=True, dtype=torch.float64)
dy = torch.tensor(1.0, requires_grad=True, dtype=torch.float64)
dz = torch.tensor(1.0, requires_grad=True, dtype=torch.float64)由于要对它们求导,所以需要 requires_grad 为 True。
然后定义投影到 xy 平面的矩阵
## 投影矩阵
prj = torch.tensor([[1, 0],
[0, 1],
[0, 0]], dtype=torch.float64)以及旋转矩阵
def rx(a):
"""
关于x轴的旋转矩阵
"""
RX = torch.zeros(3, 3, dtype=torch.float64)
RX[0, 0] = 1
RX[1, 1] = a.cos()
RX[1, 2] = -a.sin()
RX[2, 1] = a.sin()
RX[2, 2] = a.cos()
return RX
def ry(b):
"""
关于y轴的旋转矩阵
"""
RY = torch.zeros(3, 3, dtype=torch.float64)
RY[0, 0] = b.cos()
RY[0, 2] = b.sin()
RY[1, 1] = 1
RY[2, 0] = -b.sin()
RY[2, 2] = b.cos()
return RY
def rz(r):
"""
关于z轴的旋转矩阵
"""
RZ = torch.zeros(3, 3, dtype=torch.float64)
RZ[0, 0] = r.cos()
RZ[0, 1] = -r.sin()
RZ[1, 0] = r.sin()
RZ[1, 1] = r.cos()
RZ[2, 2] = 1
return RZ
def r(a, b, r):
"""
空间旋转矩阵
"""
R = torch.mm(rx(a), ry(b))
R = torch.mm(R, rz(r))
return R这里我们给旋转矩阵赋值的方式有点怪异,没有直接从数组建立,这是因为旋转矩阵也需要包含梯度信息。
接下来定义空间变换函数和目标函数
def transform(src):
"""
空间变换
"""
## 缩放矩阵
s=torch.zeros(3, 3, dtype=torch.float64)
s[0, 0] = lambdaX
s[1, 1] = lambdaY
s[2, 2] = lambdaZ
## 位移向量
t = torch.zeros(1, 3, dtype=torch.float64)
t[0, 0] = dx
t[0, 1] = dy
t[0, 2] = dz
R = r(alpha, beta, gamma)
dst = torch.mm(src, R)+ t
dst = torch.mm(dst, s)
return dst
def L(src, p):
"""
目标函数
"""
dst = transform(src)
dst = torch.mm(dst, prj)
L = dst - p
return (L[::,0]**2+L[::, 1]**2).sum()/len(src)最后,以迭代的方式优化目标函数
src = np.loadtxt("/path/to/src.csv")
src = torch.from_numpy(src)
p = np.loadtxt("/path/to/p.csv")
p = torch.from_numpy(p)
iter=128000
lr = 0.00001
def gd(params):
"""
梯度下降
"""
for p in params:
p.data -= lr * p.grad
p.grad.data.zero_()
for i in range(iter):
l = L(src, p)
if i % 1000 ==0:
print(l)
l.backward()
gd([alpha, beta, gamma, lambdaX, lambdaY, lambdaZ, dx, dy, dz])这里我们把学习率设的很小,否则结果不收敛。下面我们用 zack 的脸来跑个例子
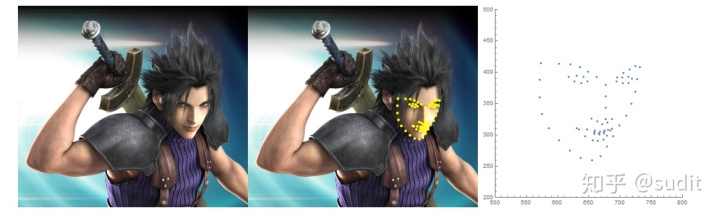
首先根据原图来看,zack 脸部大致是朝左斜向下的,具体来说,俯仰角(绕 x 轴)
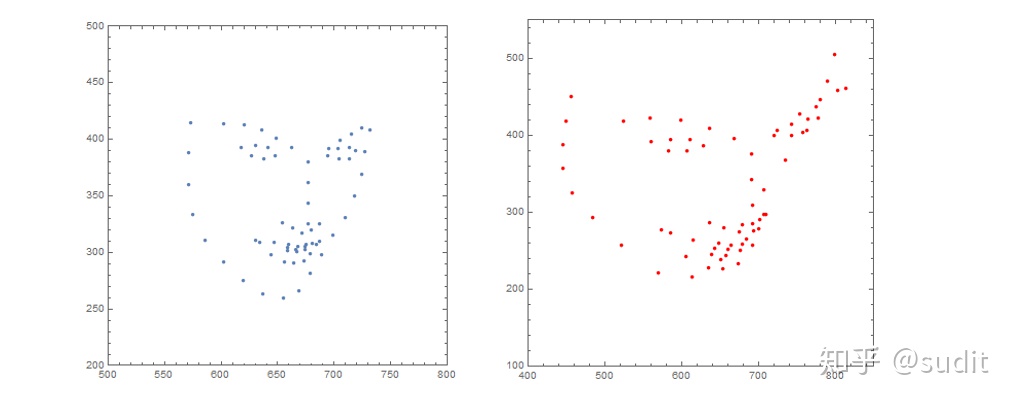
上图左边是原图的人脸关键点,右边是学习出来的结果,两者的面部方向有点差异,但大致上是相同的,可见,我们这个算法有一定效果。当然这只是比较粗糙的实验,用于说明方案的可行性,这里具体的优化算法显得有点暴力,所以时间效率不是很好,后面我们将研究 opencv 所使用的方法。
最后附上68点标准3d人脸坐标
-73.393523,29.801432,-47.667532
-72.775014,10.949766,-45.909403
-70.533638,-7.929818,-44.84258
-66.850058,-26.07428,-43.141114
-59.790187,-42.56439,-38.635298
-48.368973,-56.48108,-30.750622
-34.121101,-67.246992,-18.456453
-17.875411,-75.056892,-3.609035
0.098749,-77.061286,0.881698
17.477031,-74.758448,-5.181201
32.648966,-66.929021,-19.176563
46.372358,-56.311389,-30.77057
57.34348,-42.419126,-37.628629
64.388482,-25.45588,-40.886309
68.212038,-6.990805,-42.281449
70.486405,11.666193,-44.142567
71.375822,30.365191,-47.140426
-61.119406,49.361602,-14.254422
-51.287588,58.769795,-7.268147
-37.8048,61.996155,-0.442051
-24.022754,61.033399,6.606501
-11.635713,56.686759,11.967398
12.056636,57.391033,12.051204
25.106256,61.902186,7.315098
38.338588,62.777713,1.022953
51.191007,59.302347,-5.349435
60.053851,50.190255,-11.615746
0.65394,42.19379,13.380835
0.804809,30.993721,21.150853
0.992204,19.944596,29.284036
1.226783,8.414541,36.94806
-14.772472,-2.598255,20.132003
-7.180239,-4.751589,23.536684
0.55592,-6.5629,25.944448
8.272499,-4.661005,23.695741
15.214351,-2.643046,20.858157
-46.04729,37.471411,-7.037989
-37.674688,42.73051,-3.021217
-27.883856,42.711517,-1.353629
-19.648268,36.754742,0.111088
-28.272965,35.134493,0.147273
-38.082418,34.919043,-1.476612
19.265868,37.032306,0.665746
27.894191,43.342445,-0.24766
37.437529,43.110822,-1.696435
45.170805,38.086515,-4.894163
38.196454,35.532024,-0.282961
28.764989,35.484289,1.172675
-28.916267,-28.612716,2.24031
-17.533194,-22.172187,15.934335
-6.68459,-19.029051,22.611355
0.381001,-20.721118,23.748437
8.375443,-19.03546,22.721995
18.876618,-22.394109,15.610679
28.794412,-28.079924,3.217393
19.057574,-36.298248,14.987997
8.956375,-39.634575,22.554245
0.381549,-40.395647,23.591626
-7.428895,-39.836405,22.406106
-18.160634,-36.677899,15.121907
-24.37749,-28.677771,4.785684
-6.897633,-25.475976,20.893742
0.340663,-26.014269,22.220479
8.444722,-25.326198,21.02552
24.474473,-28.323008,5.712776
8.449166,-30.596216,20.671489
0.205322,-31.408738,21.90367
-7.198266,-30.844876,20.328022
最后
以上就是壮观人生最近收集整理的关于七点人脸姿态估计_人脸姿态估计算法分享的全部内容,更多相关七点人脸姿态估计_人脸姿态估计算法分享内容请搜索靠谱客的其他文章。








发表评论 取消回复