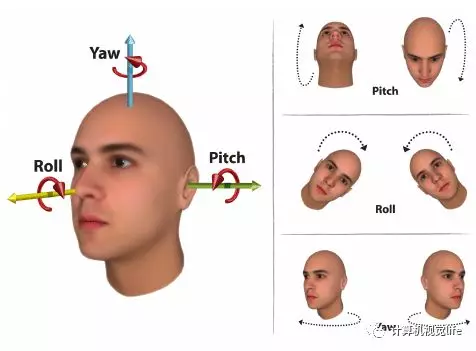
人脸姿态估计主要是获得脸部朝向的角度信息。一般可以用旋转矩阵、旋转向量、四元数或欧拉角表示(这四个量也可以互相转换)。一般而言,欧拉角可读性更好一些,使用更为广泛。本文获得的人脸姿态信息用三个欧拉角(pitch,yaw,roll)表示,通俗讲就是抬头、摇头和转头。
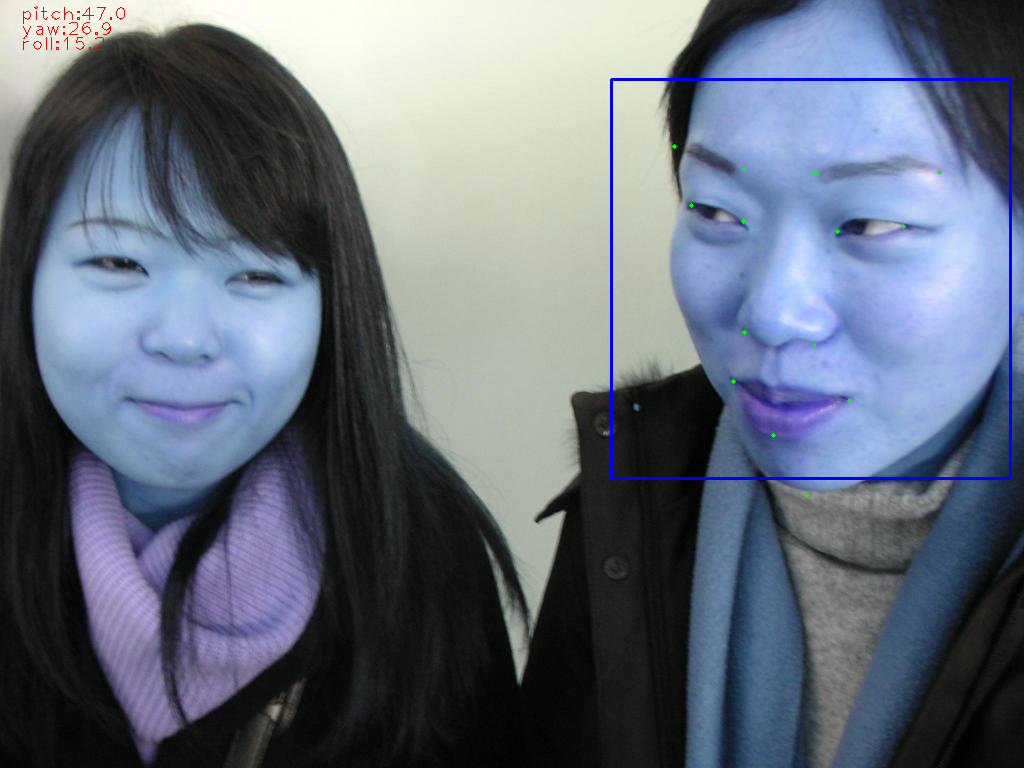
话不多说,先上图:
代码部分解答:
本例中只是用了14个关键点,主要是因为通用的3D人脸模型的标注方式和dlib检测出来的点不对应,因此选择了部分共同的特征,points_68 代表的部分检测出来的点,排列方式与model_points 对应。
代码如下:
import cv2
import matplotlib.pyplot as plt
import numpy as np
import dlib
import os
import sys
import math
model_points = np.array([
[6.825897, 6.760612, 4.402142],
[1.330353, 7.122144, 6.903745],
[-1.330353, 7.122144, 6.903745 ],
[-6.825897, 6.760612, 4.402142],
[5.311432, 5.485328, 3.987654],
[1.789930, 5.393625, 4.413414],
[-1.789930, 5.393625, 4.413414],
[-5.311432, 5.485328, 3.987654],
[2.005628, 1.409845, 6.165652],
[-2.005628, 1.409845, 6.165652],
[2.774015, -2.080775, 5.048531],
[-2.774015, -2.080775, 5.048531],
[0.000000, -3.116408, 6.097667],
[0.000000, -7.415691, 4.070434]])
detector = dlib.get_frontal_face_detector()
pic_path = "/media/xxxxx/5874eb32-3573-4145-9cce-b105957df272/data_process/data_pro/solov2/5007442_2.jpg"
img = cv2.imread(pic_path)
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
faces = detector(img, 2)
face = faces[0]
x0,y0,x1,y1 = face.left(),face.top(),face.right(),face.bottom()
cv2.rectangle(img, (x0,y0), (x1,y1), (255,0,0), 2) #画个人脸框框
predictor = dlib.shape_predictor('/media/zhoukx/5874eb32-3573-4145-9cce-b105957df272/data_process/data_pro/solov2/shape_predictor_68_face_landmarks.dat')
ldmk = predictor(img, face)
points = np.array([(p.x, p.y) for p in ldmk.parts()],dtype="double")
#17 left brow left corner
#21 left brow right corner
#22 right brow left corner
#26 right brow right corner
#36 left eye left corner
#39 left eye right corner
#42 right eye left corner
#45 right eye right corner
#31 nose left corner
#35 nose right corner
#48 mouth left corner
#54 mouth right corner
#57 mouth central bottom corner
#8 chin corner
points_68 = np.array([
points[17],
points[21],
points[22],
points[26],
points[36],
points[39],
points[42],
points[45],
points[31],
points[35],
points[48],
points[54],
points[57],
points[8]
],dtype="double")
size=img.shape
focal_length = size[1]
center = (size[1]/2, size[0]/2)
camera_matrix = np.array(
[[focal_length, 0, center[0]],
[0, focal_length, center[1]],
[0, 0, 1]], dtype = "double"
)
print ("Camera Matrix :n {0}".format(camera_matrix))
dist_coeffs = np.zeros((4,1)) # Assuming no lens distortion
(success, rotation_vector, translation_vector) = cv2.solvePnP(model_points, points_68, camera_matrix, dist_coeffs)
print ("Rotation Vector:n {0}".format(rotation_vector))
print ("Translation Vector:n {0}".format(translation_vector))
theta = np.linalg.norm(rotation_vector)
r = rotation_vector / theta
R_ = np.array([[0, -r[2][0], r[1][0]],
[r[2][0], 0, -r[0][0]],
[-r[1][0], r[0][0], 0]])
R = np.cos(theta) * np.eye(3) + (1 - np.cos(theta)) * r * r.T + np.sin(theta) * R_
print('旋转矩阵')
print(R)
def isRotationMatrix(R):
Rt = np.transpose(R)
shouldBeIdentity = np.dot(Rt, R)
I = np.identity(3, dtype=R.dtype)
n = np.linalg.norm(I - shouldBeIdentity)
return n < 1e-6
def rotationMatrixToAngles(R):
assert (isRotationMatrix(R))
sy = math.sqrt(R[0, 0] * R[0, 0] + R[1, 0] * R[1, 0])
singular = sy < 1e-6
if not singular:
x = math.atan2(R[2, 1], R[2, 2])
y = math.atan2(-R[2, 0], sy)
z = math.atan2(R[1, 0], R[0, 0])
else:
x = math.atan2(-R[1, 2], R[1, 1])
y = math.atan2(-R[2, 0], sy)
z = 0
x = x*180.0/3.141592653589793
y = y*180.0/3.141592653589793
z = z*180.0/3.141592653589793
line = 'pitch:{:.1f}nyaw:{:.1f}nroll:{:.1f}'.format(y,x,z)
print('{},{}'.format(os.path.basename(pic_path), line.replace('n',',')))
y = 20
for _, txt in enumerate(line.split('n')):
cv2.putText(img, txt, (20, y), cv2.FONT_HERSHEY_PLAIN, 1.3, (0,0,255), 1)
y = y + 15
for p in points_68:
cv2.circle(img, (int(p[0]),int(p[1])), 2, (0,255,0), -1, 0)
cv2.imshow('img', img)
if cv2.waitKey(-1) == 27:
pass
return np.array([x, y, z])
n = isRotationMatrix(R)
x_y_z = rotationMatrixToAngles(R)
print(x_y_z)
参考文章:
1 人脸姿态估计(计算欧拉角)_sunnygirl's house-CSDN博客_人脸姿态估计
2 关于人脸关键点的数据集WFLW数据预处理_baidu_40840693的博客-CSDN博客
3 GitHub - lincolnhard/head-pose-estimation: Real-time head pose estimation built with OpenCV and dlib
4 重磅!头部姿态估计「原理详解 + 实战代码」来啦!
最后
以上就是温柔香烟最近收集整理的关于人脸姿态估计(代码已跑通)的全部内容,更多相关人脸姿态估计(代码已跑通)内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复