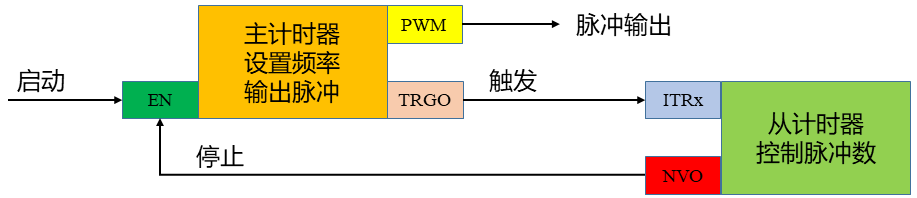
1.主计时器负责设置脉冲输出的频率以及输出脉冲,从计数器所控制输出的脉冲数。
2.具体过程是这样的,主进程启动主从计时器,从计时器通过主计时器输出的触发信号开始脉冲计数,当达到指定的计数值后,产生中断停止主计时器输出,直到主进程再次开启这一过程。
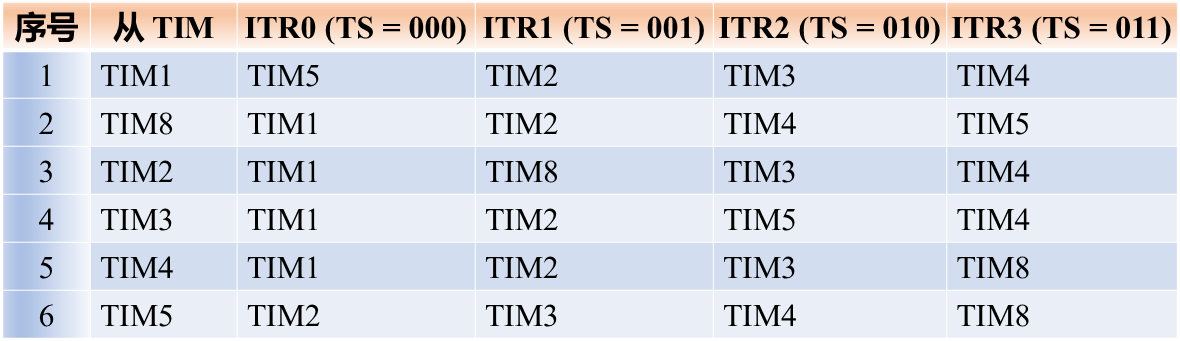
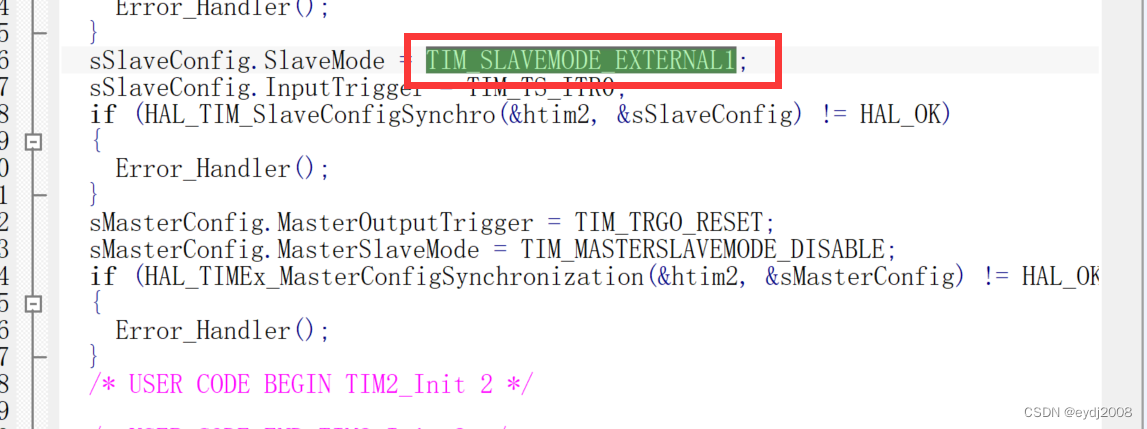
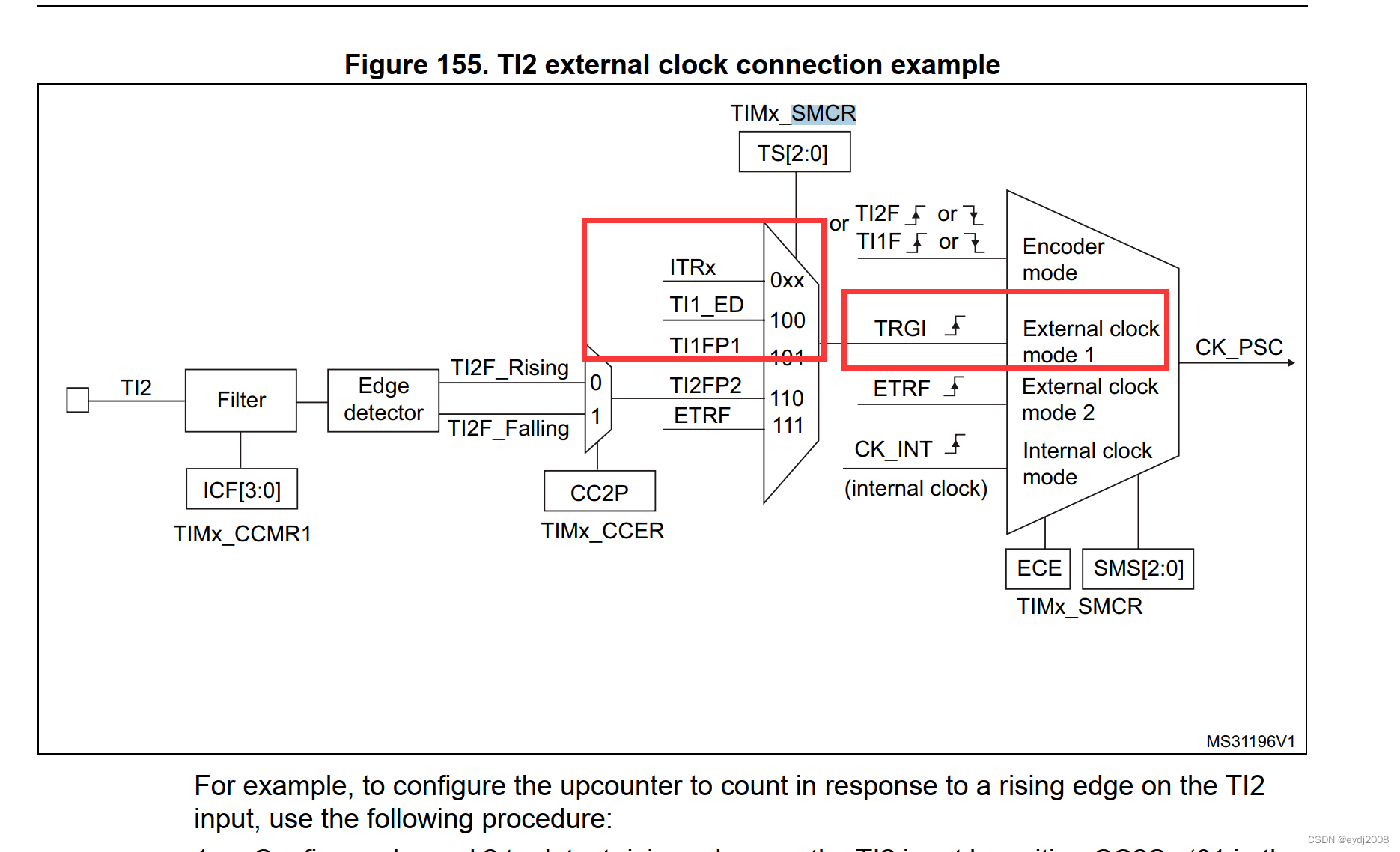
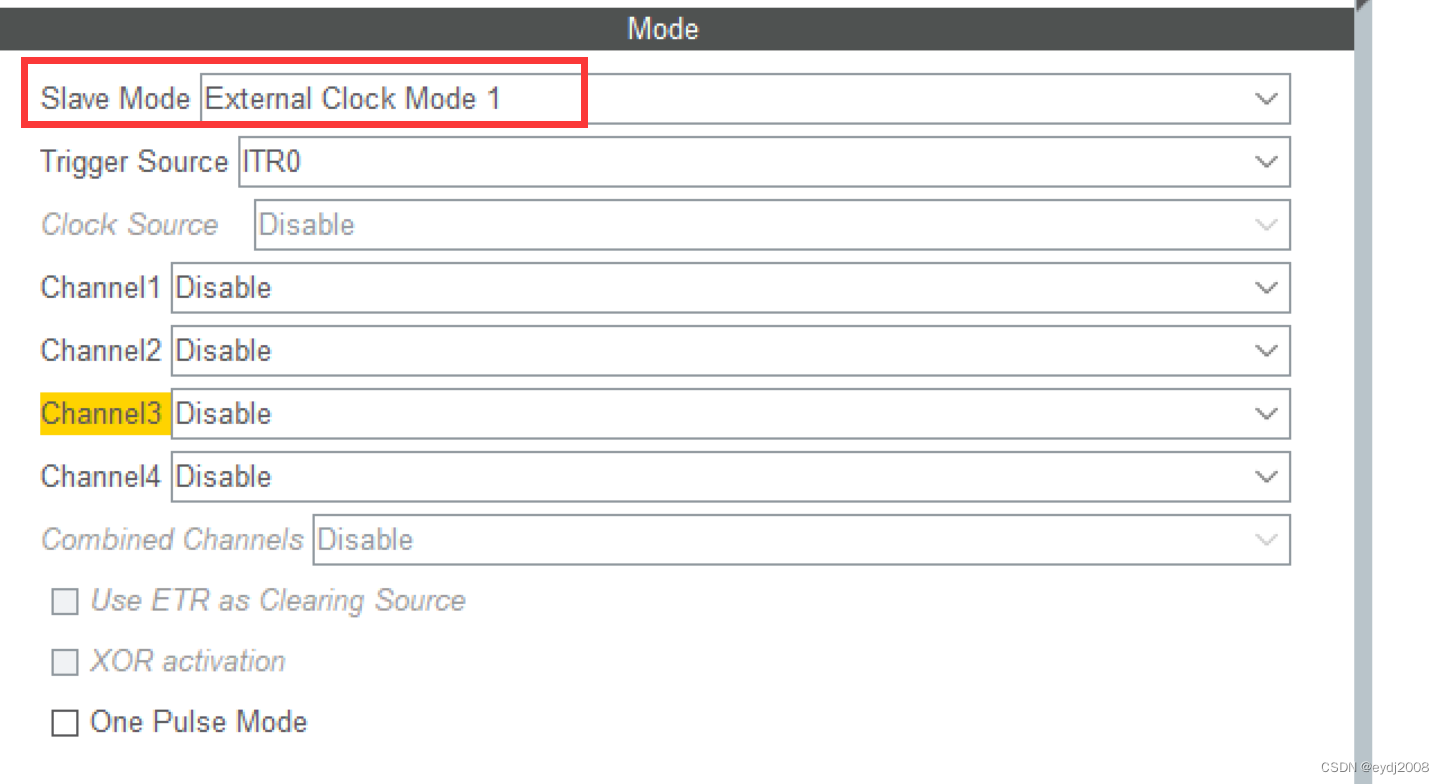
TIM_SLAVEMODE_EXTERNAL1 <=== 其实它就是内部的触发源做为时钟 而非外部时钟
触发源来一个脉冲 从定时器计一个数,这就是我们想要的结果。
TIM2->CNT就是我们想要的脉冲数, 停止时将它CLR.
TIM_SLAVEMODE_DISABLE //禁用从模式
TIM_SLAVEMODE_RESET //触发源 复位从定时器CNT
TIM_SLAVEMODE_GATED //低电平时计数器启动计数,高电平时停止计数
TIM_SLAVEMODE_TRIGGER //可选内部时钟和外部时钟
TIM_SLAVEMODE_EXTERNAL1 //触发源做为时钟 记数 这个功能很好
/* TIM1 init function */
void MX_TIM1_Init(void)
{
/* USER CODE BEGIN TIM1_Init 0 */
/* USER CODE END TIM1_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
TIM_BreakDeadTimeConfigTypeDef sBreakDeadTimeConfig = {0};
/* USER CODE BEGIN TIM1_Init 1 */
/* USER CODE END TIM1_Init 1 */
htim1.Instance = TIM1;
htim1.Init.Prescaler = 16;
htim1.Init.CounterMode = TIM_COUNTERMODE_UP;
htim1.Init.Period = 65535;
htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim1.Init.RepetitionCounter = 0;
htim1.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_Base_Init(&htim1) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim1, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_Init(&htim1) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_UPDATE;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_ENABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim1, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCNPolarity = TIM_OCNPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
sConfigOC.OCIdleState = TIM_OCIDLESTATE_RESET;
sConfigOC.OCNIdleState = TIM_OCNIDLESTATE_RESET;
if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_2) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_3) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_4) != HAL_OK)
{
Error_Handler();
}
sBreakDeadTimeConfig.OffStateRunMode = TIM_OSSR_DISABLE;
sBreakDeadTimeConfig.OffStateIDLEMode = TIM_OSSI_DISABLE;
sBreakDeadTimeConfig.LockLevel = TIM_LOCKLEVEL_OFF;
sBreakDeadTimeConfig.DeadTime = 0;
sBreakDeadTimeConfig.BreakState = TIM_BREAK_DISABLE;
sBreakDeadTimeConfig.BreakPolarity = TIM_BREAKPOLARITY_HIGH;
sBreakDeadTimeConfig.AutomaticOutput = TIM_AUTOMATICOUTPUT_DISABLE;
if (HAL_TIMEx_ConfigBreakDeadTime(&htim1, &sBreakDeadTimeConfig) != HAL_OK)
{
Error_Handler();
}
/* TIM2 init function */
void MX_TIM2_Init(void)
{
/* USER CODE BEGIN TIM2_Init 0 */
/* USER CODE END TIM2_Init 0 */
TIM_SlaveConfigTypeDef sSlaveConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
/* USER CODE BEGIN TIM2_Init 1 */
/* USER CODE END TIM2_Init 1 */
htim2.Instance = TIM2;
htim2.Init.Prescaler = 0;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 0xffffffff;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sSlaveConfig.SlaveMode = TIM_SLAVEMODE_EXTERNAL1;
sSlaveConfig.InputTrigger = TIM_TS_ITR0;
if (HAL_TIM_SlaveConfigSynchro(&htim2, &sSlaveConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM2_Init 2 */
/* USER CODE END TIM2_Init 2 */
}
//=======================================================================================
void StartMotor1PWMFunc(u16 num)
{
switch(num)
{
case 0x00:
if (HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_4) == HAL_OK)
{
HAL_TIM_OC_Start_IT(&htim2,TIM_CHANNEL_4); //开启MOTOR1通道的输入捕获中断
}
break;
case 0x01:
if (HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_2) == HAL_OK)
{
HAL_TIM_OC_Start_IT(&htim2,TIM_CHANNEL_2); //开启MOTOR2通道的输入捕获中断
}
break;
case 0x02:
if (HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_3) == HAL_OK)
{
HAL_TIM_OC_Start_IT(&htim2,TIM_CHANNEL_3); //开启MOTOR3通道的输入捕获中断
}
break;
case 0x03:
if (HAL_TIM_PWM_Start(&htim9, TIM_CHANNEL_1) == HAL_OK) //从定时器没有
{
//HAL_TIM_OC_Start_IT(&htim2,TIM_CHANNEL_1); //开启MOTOR4通道的输入捕获中断
}
break;
default:
break;
}
}
//=======================================================================================
void StopMotor1PWMFunc(u16 num)
{
htim1.Instance->CR1 &= ~(TIM_CR1_CEN); //Counter disabled
SetCounterFunc(0);
switch(num)
{
case 0x00:
if(HAL_TIM_PWM_Stop_IT(&htim1, TIM_CHANNEL_4)==HAL_OK) //关闭MOTOR1的PWM输出
{
HAL_TIM_OC_Stop_IT(&htim2,TIM_CHANNEL_4) ; //关闭定时器的通道1的输入中断捕获
}
break;
case 0x01:
if(HAL_TIM_PWM_Stop_IT(&htim1, TIM_CHANNEL_2)==HAL_OK) //关闭MOTOR2的PWM输出
{
HAL_TIM_OC_Stop_IT(&htim2,TIM_CHANNEL_2) ; //关闭定时器的通道1的输入中断捕获
}
break;
case 0x02:
if(HAL_TIM_PWM_Stop_IT(&htim1, TIM_CHANNEL_3)==HAL_OK) //关闭MOTOR3的PWM输出
{
HAL_TIM_OC_Stop_IT(&htim2,TIM_CHANNEL_3) ; //关闭定时器的通道1的输入中断捕获
}
break;
case 0x03:
if(HAL_TIM_PWM_Stop_IT(&htim9, TIM_CHANNEL_1)==HAL_OK) 从定时器没有
{
//HAL_TIM_OC_Stop_IT(&htim2,TIM_CHANNEL_1) ; //关闭定时器的通道1的输入中断捕获
}
break;
default:
break;
}
}
最后
以上就是无辜芒果最近收集整理的关于巨坑的STM32 定时器从模式 外部时钟 --------高速脉冲计数源码的全部内容,更多相关巨坑的STM32内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复