1,TIM3主定时器,TIM2从定时器
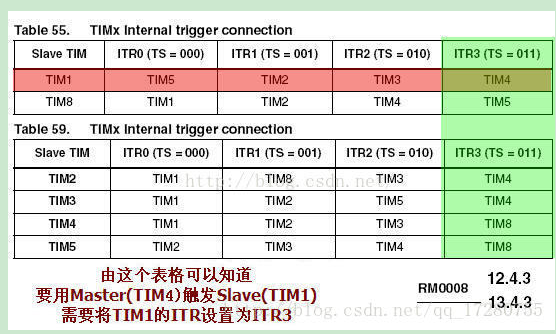
首先查看定时器内部连接图。Slave_TIM2,Master_TIM3,所以选择ITR2
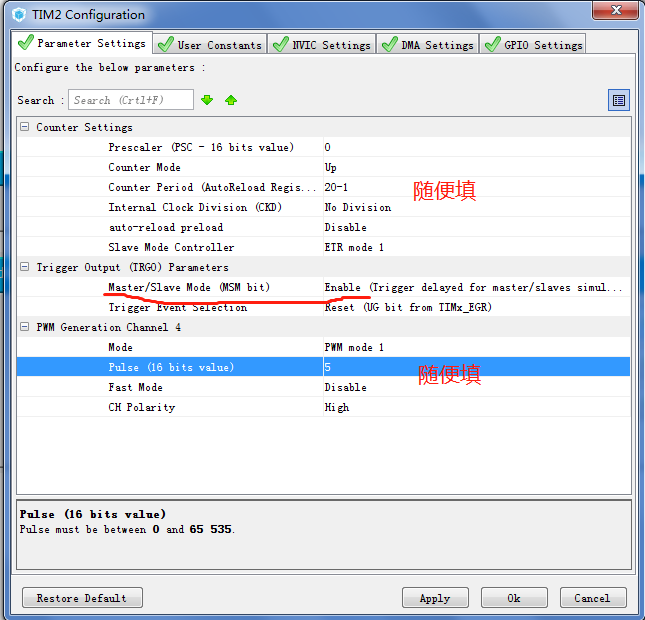
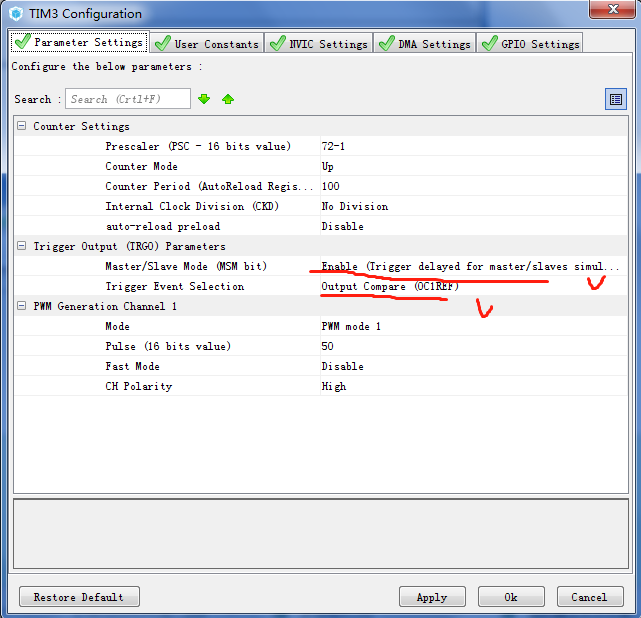
2,定时器配置
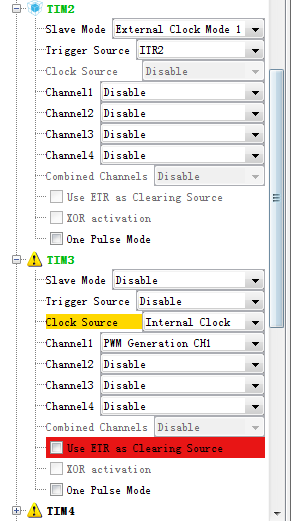
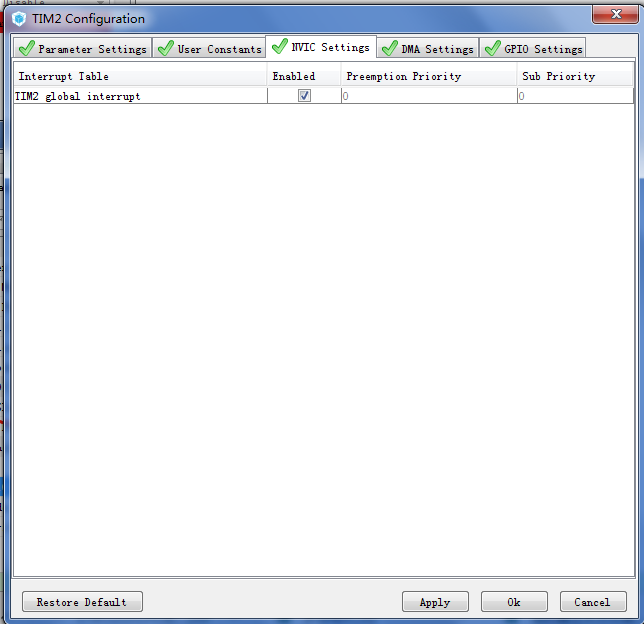
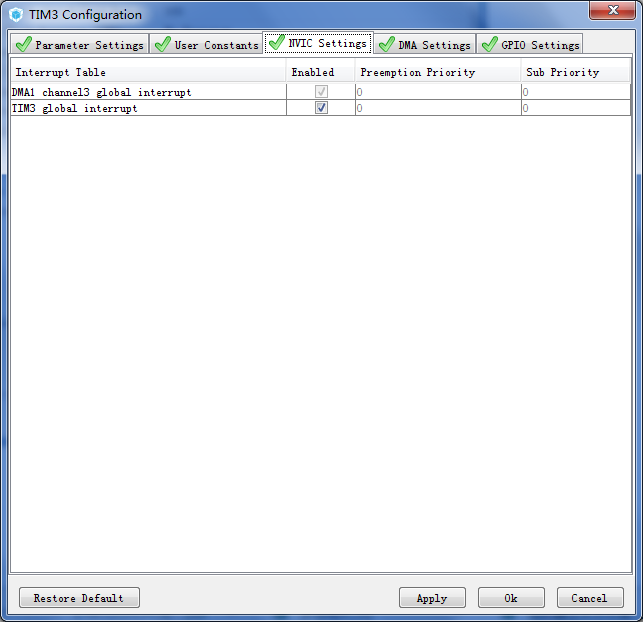
开启中断
TIM3配置图
3,自动生成之后主要使用的函数
__HAL_TIM_SET_AUTORELOAD(&htim2,30-1);//ARR,自动重装寄存器,设置周期
__HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_4,2);//CCR,捕获比较寄存器 ,设置占空比
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_1);//开启PWM输出
HAL_TIM_Base_Start_IT(&htim2); //开启定时器中断
HAL_TIM_PWM_Stop(&htim3, TIM_CHANNEL_1);//停止PWM输出
HAL_TIM_Base_Stop_IT(&htim2);
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)//中断回调函数
{
if(htim->Instance==htim3.Instance) //TIM3这个是电机的脉冲控制端口
}4,自动生成的初始化
/* TIM2 init function */
void MX_TIM2_Init(void)
{
TIM_SlaveConfigTypeDef sSlaveConfig;
TIM_MasterConfigTypeDef sMasterConfig;
TIM_OC_InitTypeDef sConfigOC;
htim2.Instance = TIM2;
htim2.Init.Prescaler = 0;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 20-1;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
if (HAL_TIM_PWM_Init(&htim2) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
sSlaveConfig.SlaveMode = TIM_SLAVEMODE_EXTERNAL1;
sSlaveConfig.InputTrigger = TIM_TS_ITR2;
if (HAL_TIM_SlaveConfigSynchronization(&htim2, &sSlaveConfig) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_ENABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_4) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
HAL_TIM_MspPostInit(&htim2);
}/* TIM3 init function */
void MX_TIM3_Init(void)
{
TIM_ClockConfigTypeDef sClockSourceConfig;
TIM_MasterConfigTypeDef sMasterConfig;
TIM_OC_InitTypeDef sConfigOC;
htim3.Instance = TIM3;
htim3.Init.Prescaler = 72-1;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 100;
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim3) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim3, &sClockSourceConfig) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
if (HAL_TIM_PWM_Init(&htim3) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_OC1REF;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_ENABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 50;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
HAL_TIM_MspPostInit(&htim3);
}
最后
以上就是狂野镜子最近收集整理的关于【STM32CUBE 16】主从定时器,精确计算PWM脉冲个数 2018年11月13日的全部内容,更多相关【STM32CUBE内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复