一、问题描述
什么是A*搜索算法?
A星搜索算法,也称最佳图搜索算法。这是一种在图形平面上,有多个节点的路径,求出最优路径的算法。A算法是一种启发式搜索算法,启发式搜索就是在状态空间中的搜索对每一个搜索的位置进行评估,得到最好的位置,再从这个位置进行搜索直到目标。这样可以省略大量无谓的搜索路径,提高了效率。
二、实验目的
本实验主要是理解A*搜索算法的启发性策略。
三、实验内容
(1)A*算法描述
A* 算法加入了启发式的搜索策略,在搜索时间上通常优于 Dijkstra 算法。A* 使用了一个估计值 F 代表某一个节点到终点的估计距离,计算公式如下:
其中,G(n)表示从起点到节点n的真实距离,
H(n)表示用启发函数计算的节点n到终点的距离。
另外 A* 包含两个列表,open list 和 close list,open list 保存了等待探索的节点,而 close list 表示已经探索过的节点。
(2)问题的搜索形式描述
状态:状态描述了8个棋子和空位在棋盘上的9个方格上的分布。
初始状态:任何状态都可以被指定为初始状态。
操作符:用来产生4个行动(上下左右移动)。
目标测试:用来检测状态是否能匹配初始状态。
启发函数:根据启发函数找到F(n)的值,然后根据F(n)的值的大小来排列待扩展状态的次序,每次选择F(n)最小的状态进行扩展。
(3)实验步骤
步骤一:把起点 s 放入到 open list 里面。
步骤二:检查 open list,如果终点 e 在 open list 里面,则路径搜索完成。如果 open list 为空,则说明不存在路径。
步骤三:在 open list 里面选择估计值 F 最小的节点 u,作为当前节点,然后加入 close list 里面。
步骤四:取得所有节点 u 可以直接到达的节点 v,然后更新 open list。更新规则:如果 v 在 close list 里,则不处理;如果 v 不在 open list 里面,则把 v 加入 open list,其对应 F 值为 G(u)+distance(u,v)+H(v);如果 v 在 open list 里面,则检查 v 是否有更小的 F 值 (如果有更小 F 值,就更新 v 的 F 值);
重复步骤二到步骤四,直到终止。
(4)主要代码(python实现)
import numpy as np
import operator
O = int(input(("请输入方阵的行/列数:")))
A = list(input("请输入初始状态:"))
B = list(input("请输入目标状态:"))
z = 0
M = np.zeros((O, O))
N = np.zeros((O, O))
for i in range(O):
for j in range(O):
M[i][j] = A[z]
N[i][j] = B[z]
z = z + 1
openlist = [] # open表
class State:
def __init__(self, m):
self.node = m # 节点代表的状态
self.f = 0 # f(n)=g(n)+h(n)
self.g = 0 # g(n)
self.h = 0 # h(n)
self.father = None # 节点的父亲节点
init = State(M) # 初始状态
goal = State(N) # 目标状态
# 启发函数
def h(s):
a = 0
for i in range(len(s.node)):
for j in range(len(s.node[i])):
if s.node[i][j] != goal.node[i][j]:
a = a + 1
return a
# 对节点列表按照估价函数的值的规则排序
def list_sort(l):
cmp = operator.attrgetter('f')
l.sort(key=cmp)
# A*算法
def A_star(s):
global openlist # 全局变量可以让open表进行时时更新
openlist = [s]
while (openlist): # 当open表不为空
get = openlist[0] # 取出open表的首节点
if (get.node == goal.node).all(): # 判断是否与目标节点一致
return get
openlist.remove(get) # 将get移出open表
# 判断此时状态的空格位置
for a in range(len(get.node)):
for b in range(len(get.node[a])):
if get.node[a][b] == 0:
break
if get.node[a][b] == 0:
break
# 开始移动
for i in range(len(get.node)):
for j in range(len(get.node[i])):
c = get.node.copy()
if (i + j - a - b) ** 2 == 1:
c[a][b] = c[i][j]
c[i][j] = 0
new = State(c)
new.father = get # 此时取出的get节点成为新节点的父亲节点
new.g = get.g + 1 # 新节点与父亲节点的距离
new.h = h(new) # 新节点的启发函数值
new.f = new.g + new.h # 新节点的估价函数值
openlist.append(new) # 加入open表中
list_sort(openlist) # 排序
# 递归打印路径
def printpath(f):
if f is None:
return
# 注意print()语句放在递归调用前和递归调用后的区别。放在后实现了倒叙输出
printpath(f.father)
print(f.node)
final = A_star(init)
if final:
print("有解,解为:")
printpath(final)
else:
print("无解")
四、实验结果及分析
以8数码问题为例实现A*算法的求解程序运行结果:
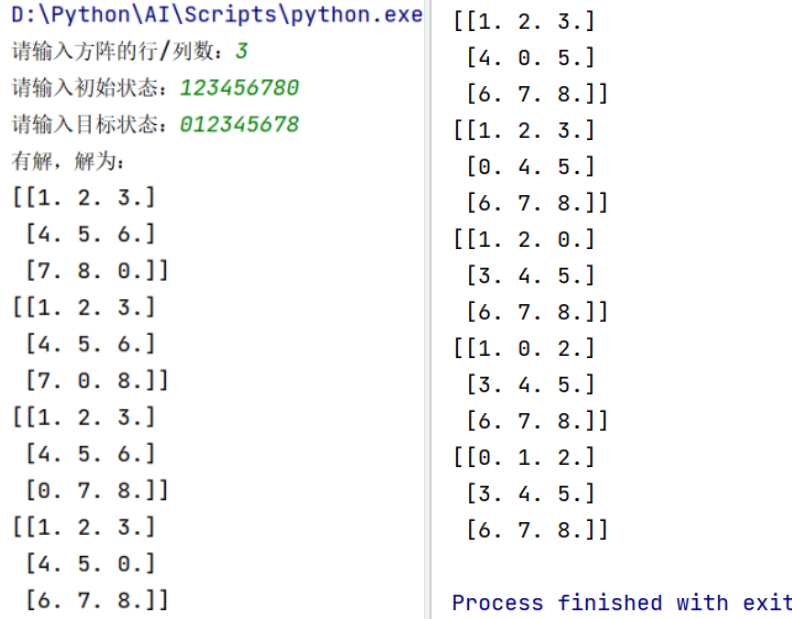
分析:
1.对于8数码问题,每个节点有8个数字和一个空格,可以将空格看成0,所以一共有9个数字。从初始状态到最终状态,进行路径搜索。
2.启发函数:每一个数字位与目标中该数字位的距离,满足单调限制。说明:A*算法是启发式搜索算法,搜索时充分利用当前状态距目标距离远近的启发信息,选取当前未扩展结点中估价函数最小的进行扩展,生成结点数少,搜索空间较小,实现稍复杂。
3.算法分析
将起始点加入open表
当open表不为空时:
寻找open表中f值最小的点current
它是终止点,则找到结果,程序结束。
否则,Open表移出current,对current表中的每一个临近点
若它不可走或在close表中,略过
若它不在open表中,加入。
若它在open表中,计算g值,
若g值更小,替换其父节点为current,更新它的g值。
若open表为空,则路径不存在。
五、遇到的问题及解决办法
1.判断有无解问题
根据逆序数直接判断有无解,对于一个八数码,依次排列之后,每次是将空位和相邻位进行调换,研究后会发现,每次调换,逆序数增幅都为偶数,也就是不改变奇偶性,所以初始和目标状态的逆序数的奇偶性相同。
2.解决结点重复扩展问题
对于一个结点有多种方式到达该结点,这样就可能多次将它加入open表中,而启发函数满足单调限制条件,后来达到该结点的路径不再是更优的,可以不予考虑。扩展某结点时先看该结点是否已经扩展过,如果扩展过则略过。
3.A* 启发函数的选择与区别
如果不设置启发函数,则 A* 就是 Dijkstra 算法,这时可以找到最短路径。如果启发函数 H(n) 的值一定小于等于 n 到终点的实际距离,则 A* 可以保证找到最短路径。如果 H(n) 的值等于 n 到终点的实际距离,则 A* 会直接找到最短路径,而不用扩展搜索额外的节点,此时运行是最快的。如果 H(n) 的值有可能大于 n 到终点的实际距离,则 A* 算法不一定可以找到最短路径,但是运行速度会比较快。
最后
以上就是机灵外套最近收集整理的关于A*搜索算法的启发性策略--八数码问题实现(附代码)一、问题描述二、实验目的三、实验内容四、实验结果及分析五、遇到的问题及解决办法的全部内容,更多相关A*搜索算法内容请搜索靠谱客的其他文章。








发表评论 取消回复