一、前言
这两种控制分类非常有趣,在未来的发展趋势中,一个将面向智能(高新技术),一个面向工业生产(工业级稳定)。
1. 运动控制:
运动控制主要是指以机械运动的驱动设备------电动机为控制对象,以单片机、CPU等控制器为核心,以电力电子功率变换装置为执行机构,组成的电器传动自动控制系统。自动控制系统将电能转化成机械能,实现机械的运动控制。
2. 过程控制:
过程控制系统是指主要通过控制工艺参数如温度、压力、流量、液位、浓度等接近给定值或者保持在给定值范围内的向动控制系统,控制的主要目的是保持工业生产的连续性和稳定性,减少扰动。一般的过程控制系统通常采用反馈控制的形式,这就是过程控制的主要方式了。
二、技术讲解
1. 根据是否需要考虑机器人动力学特性把轨迹跟踪控制方法分为以下两类:
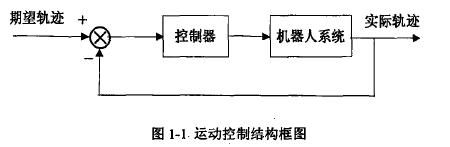
(1)“运动控制”一忽略机器人的动力学特性,只按照期望轨迹与实际轨迹之间的偏差进行负反馈控制,其控制框图如图1-1所示。通常把这类控制方法称为传统控制方法,主要有开环控制、PID反馈控制、计算力矩法等。传统控制方法在机器人控制中是最为简单且常见的方法,但在复杂的机器人轨迹跟踪控制中,这类方法很难保证控制系统性能。
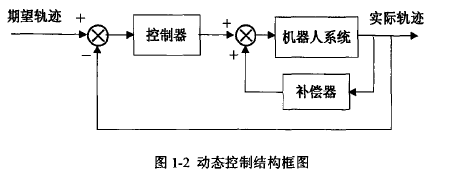
(2)“动态控制”一根据机器人动力学特性精心设计出更具有针对性的非线性控制律,其控制框图如图1-2所示。该类控制方法由于考虑了机器人动力学特性,因此相对于运动控制方法,可以使受控机器人具有更好的性能。机器人动态控制方法按其发展阶段可分为现代控制和智能控制。
现代控制理论在机器人控制中占据了很重要的地位,其代表控制算法主要有自适应控制、滑模变结构控制和鲁棒控制等。
智能控制代表了机器人控制技术的最新研究成果,第一次出现在20世纪60年代,随后,迭代学习控制、模糊控制和神经网络控制等智能控制方法在不确定性机器人控制中得到了日益广泛的应用。
- 学习控制是智能控制最早的研究领域之一,它利用控制系统较少的先验知识,结合系统输出和设定值构造新的控制输入,从而到达满意的控制效果。
- 模糊控制凭借人类的专家控制经验弥补机器人系统中的不确定因素及非线性,并且不依赖于被控对象精确的数学模型,具有较佳的鲁棒性和适应性。但其本身还存在如下不足:
(1)不能系统性的设计模糊控制器;
(2)没有正确、可靠的办法获取模糊规则及隶属函数;
(3)信息的模糊处理将会影响控制系统性能;
(4)缺少有效的方法保证控制系统的稳定性。- 神经网络控制器执行速度快、鲁棒性好,然而,目前神经网络自身还存在着一些问题,这将会影响到神经控制器的性能,因此对神经网络的研究还有大量需要解决的问题。
上述控制算法的不足之处:
传统控制方法虽然简单,但忽略了机器人的动力学特性,无法保证控制效果;现代控制方法是根据机器人动力学特性而设计出的,因此具有适应系统变化的能力,但其算法往往比较复杂、实时性差、有的甚至会引起系统“抖振”现象;智能控制作为机器人控制技术研究的最新成果,大大提高了机器人系统性能,然而由于其相对起步较晚,其中一些控制算法本身还存在着一些问题,且实现起来比较复杂,因此还有待进一步研究。
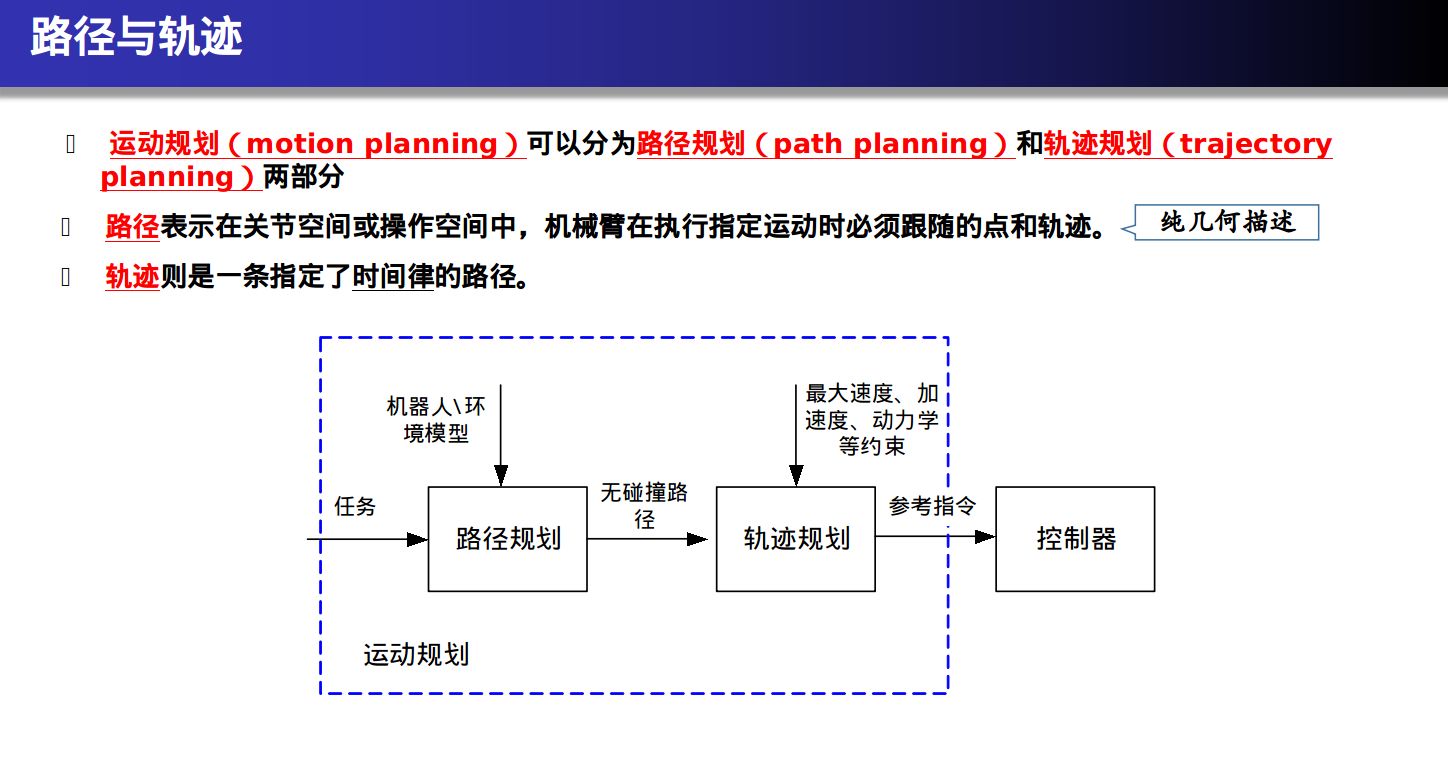
2. 运动规划、轨迹规划、路径规划的关系,如下图:
最后
以上就是可爱楼房最近收集整理的关于「 运动控制 」“运动控制、过程控制、动态控制、运动规划、轨迹规划、路径规划”浅谈的全部内容,更多相关「内容请搜索靠谱客的其他文章。








发表评论 取消回复