摘要:随着智能控制领域的蓬勃发展,越来越多的智能控制算法在许多行业被广泛应用。本文将介绍:专家PID控制、递阶控制系统以及多智能体系统共三种控制算法,每种算法将给出相应的原理、公式和相关的应用案例。
关键词:智能;运动控制。
一.专家PID控制
(1)专家PID 控制原理:
专家控制(Expert Control)的实质是基于受控对象和控制规律的各种知识,并以智能的方式利用这些知识来设计控制器。利用专家经验来设计PID参数便构成专家PID控制 [1] 。
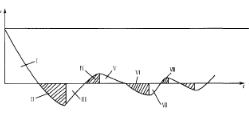
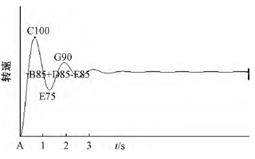
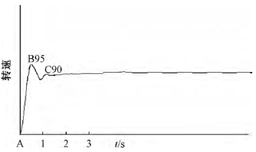
典型的二阶系统单位阶跃响应误差曲线如下图所示。对于典型的二阶系统阶跃响应过程进行如下分析。
令 e(k)表示离散化的当前采样时刻的误差值,e(k-1) 、e(k-2) 分别表示前个采样时刻的误差值,则有:
根据误差及其变化,可设计专家PID控制器,该控制器可分为以下五种情况进行设计:
(1)当|e(k)|>M_1时,说明误差的绝对值已经很大。不论误差变化趋势如何, 都应考虑控制器的输出应按最大(或最小)输出,以达到迅速调整误差,使误差绝对值以最大速度减小。此时,它相当于实施开环控制。
(2) 当ⅇ(k)Δⅇ(k)≥0时,说明误差在朝误差绝对值增大方向变化,或误差为某一常值,未发生变化。此时,如果|e_k |≥M_2, 说明误差也较大,可考虑由控制器实施较强的控制作用,以达到扭转误差绝对值朝减小方向变化,并迅速减小误差的绝对值,控制器输出可为:

此时, 如果|e_k |<M_2, 则说明尽管误差朝绝对值增大方向变化, 但误差绝对值本身并不很大,可考虑控制器实施一般的控制作用,只要扭转误差的变化趋势,使其朝误差绝对值减小方向变化,控制器输出为:

(3)当ⅇ(k)Δⅇ(k)<0、ⅇ(k)Δⅇ(k-1)>0或者ⅇ(k)=0时,说明误差的绝对值朝减小的方向变化,或者已经达到平衡状态。此时,可考虑采取保持控制器输出不变。
(4)当ⅇ(k)Δⅇ(k)<0、ⅇ(k)Δⅇ(k-1)<0时,说明误差处于极值状态。如果此时误差的绝对值较大,即|ⅇ(k)|≥M_2, 可考虑实施较强的控制作用:

如果此时误差的绝对值较小,即|ⅇ(k)|<M_2 , 可考虑实施较弱的控制作用:

(5)当|e_k |≤ε时,说明误差的绝对值很小,此时加入积分,减少稳态误差。
(其中:em(k)–误差e的第k个极值;u(k)–第k次控制器的输出;u(k-1)–第k-1次控制器的输出;k1 --增益放大系数,kl >1;k2 --抑制系数,0<k2< 1 ;Ml ,M2–设定的误差界限Ml >M2 ;k–控制周期的序号(自然数);ε–任意小的正实数。)
在上图中,I 、III、V、VII、…区域,误差朝绝对值减小的方向变化。此时,可采取保持等待措施,相当于实施开环控制; II、Ⅳ、VI、VIIl、…区域,误差绝对值朝增大的方向变化。此时,可根据误差的大小分别实施较强或一般的控制作用,以抑制动态误差。
由以上五种情况可以明显看出,专家PID算法与传统PID的算法有着明显的区别和优势,专家PID算法本质上就采用了非线性的设计手段,并且将专家经验引入控制策略的制定中,更加适合工业过程中一些较为复杂控制对象的控制策略实施,可以较好地克服常规PID对非线性系统适应性差、难以克服异常扰动以及对滞后时间常数难以确定等缺点。
(2)专家PID控制的应用:
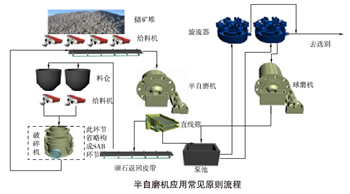
① 应用专家PID实现某矿山半自磨机的控制[2]
此方案涉及的专家PID控制参数具体过程为:
Rule 1:当系统的轴压检测值超过设定值时,先减小给水的Ki ,观察功率和轴压的变化,如果仍然持续升高则减少给矿的Ki ;
Rule 2:当系统处于稳态过程中,轴压出现波动现象,且不可接受,可参考加球情况,适当增加给水的Kd 和给矿的Kd ;
Rule 3:当系统轴压检测值发生震荡时,应尽快减小给水的Kp 和给矿的Kp ,然后观察系统情况;
Rule 4:当系统轴压对加球等干扰信号反应敏锐时,可以先减少给水的Kd 和给矿的Kd ;
Rule 5:当轴压上升时间大于设定值时,为了让轴压迅速满足控制要求,可以根据功率情况适当提高给水的Ki 和给矿的Ki ;
Rule 6:如果轴压上升时间超出上限值时,即轴压上升时间过长,可考虑增加给水的Kp 和给矿的Kp ;
Rule 7:当出现轴压上升时间过长时,先要根据Rule 5 调整,如果Rule 5 难以解决,再根据Rule 6 调整,即Ki 调整的优先级高于Kp 调整的优先级。
根据上述规则,并结合下式:
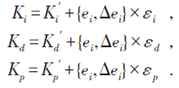
对系统的Kp 、Ki 以及Kd进行调整。式中,Kp 、Ki及Kd 为专家PID的控制参数,ei、Δei为系统的误差和误差变化率,εi 、εd 及εp为系统的修正系数。由于选矿过程的复杂性,专家PID与常规PID类似,规则库同样存在难以适应的问题,实际应用中应根据经验的积累逐步扩充和修正规则库,具体结果如下图所示:
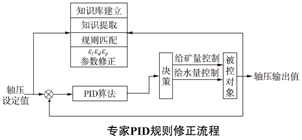
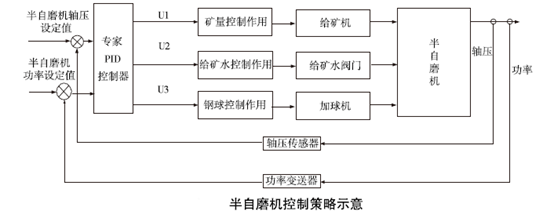
根据专家PID 的控制策略,对现场半自磨机轴压、功率和加球情况进行综合控制。从控制效果看,半自磨机的轴压稳定在设定值范围内,其功率也能稳定在相应范围内,同时根据半自磨机给矿量、给水量、顽石量、磨音等参数的综合分析,可以判断出半自磨机处于较为稳定的工作状态。
② 组合秤步进电机的智能调控方法应用[3]
由于步进电机其自身固有的特性,在其加速运行过程中易发生丢步现象。针对此问题建立步进电机系统对转动步数以及速度进行控制,对给定的组合秤步进电机参数建立二相混合式步进电机的数学模型,针对不同的实际运行环境运用专家PID控制算法对步进电机的转速进行精确调控。
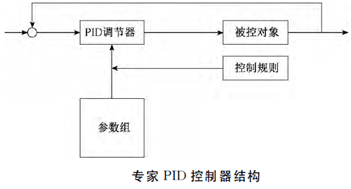
其中PID调节器接收不同的参数并根据所选的控制规则对被控对象进行相应的PID运算控制,使系统正常运行。控制规则根据速度的给定值以及速度的误差值变化,选择参数组输入到PID调节器,使系统可以根据环境的变化而对PID的控制参数进行实时的调整,从而使控制系统具有很好的鲁棒性。
由上述对比可知,基于专家PID控制算法的步进电机对于加速特性适应能力更强,超调量小、控制速度稳定且控制效果好,经实际测试验证了此设计方法高效可靠,可以很好的解决步进电机丢步问题。采用专家PID控制算法的步进电机在运行调速方面可以更好的适应现场多变复杂的工业环境,具有更高的可靠性以及稳定性。
二.递阶控制系统
(1)递阶智能机器原理:
递阶智能控制(hierarchical intelligent control), 简称递阶控制,它是在研究早期学习控制系统的基础上,并从工程控制论角度总结人工智能与自适应控制、自学习控制和自组织控制的关系之后而逐渐形成的,也是智能控制的最早理论之一。由萨里迪斯和梅斯特尔(Meystal)等人提出的递阶智能控制是按照精度随智能降低而提高的原理(IPDI)分级分布的,这一原理在递阶管理系统中十分常用。 递阶控制思想可作为一种统一的认知和控制系统方法而被广泛采用[4]。
递阶智能控制系统是由三个基本控制级构成的,其级联交互结构如下图所示:
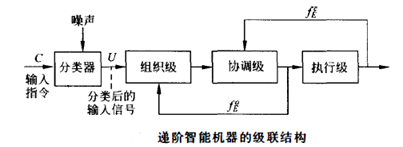
三个控制级的功能和结构如下:
- 组织级(organization level)
组织级代表控制系统的主导思想,并由人工智能起控制作用。
- 协调级(coordination level)
协调级是上(组织)级和下(执行)级间的接口,承上启下,并由人工智能和运筹学共同作用。
- 执行级(execution level)
执行级是递阶智能控制的最底层,要求具有较高的精度但较低的智能;它按控制论进行控制,对相关过程执行适当的控制作用。
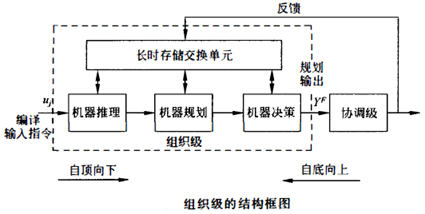
上述三级递阶结构具有自顶向下(top-down)和自底向上(bottom-up)的知识(信息)处理能力。自底向上的知识流决定于所选取信息的集合,这些信息包括从简单的底层(执行级)反馈到最高层(组织级)的积累知识。反馈信息是智能机器中学习所必需的,也是选择替代动作所需要的。
IPDI原理可由概率公式表示为
PR(MI ,DB)= PR®
式中,PR 表示概率,MI为机器知识,DB为与执行任务有关的数据库。数据库代表任务的复杂性,且取决于任务的执行精度,即该执行精度是与数据库的复杂性相称的。取自然对数后可得下式:
lnp(MI/DB) + lnp(DB) = lnp®
对两边取期望值,可得熵方程:
H(MI/DB) + H(DB) = H®
式中,H(x)为与x有关的熵。在建立和执行任务期间,期望有个不变的知识流量;这时,增大特定数据库DB的熵要求减小机器智能MI的熵。如果MI独立于DB, 那么:
H(MI) + H(DB) = H®
(2)递阶控制系统的应用:
防空火箭炮递阶控制策略设计[5]
经典的递阶控制由3个基本控制级构成,分别为组织级、协调级和执行级。防空火箭炮接收炮位计算机的位置指令,属于随动设备,故取消传统递阶控制中的组织级,设计包括决策级与实时控制级在内的两层递阶控制结构。
针对防空火箭炮运行时负载与参数大范围变化的特点,结合递阶控制理论,设计一种两层改进型递阶控制策略。其中,决策级根据火箭炮的运行状态计算实时转动惯量,实时控制级采用二阶滑模控制器,能在满足系统指标的前提下平滑控制输入曲线、有效抑制系统参数摄动与外部干扰。计算机仿真和实验表明,使用该控制策略,系统具有较好的鲁棒性与动态响应性能。
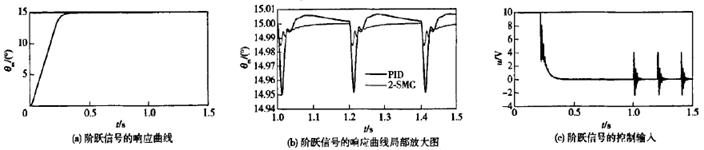
阶跃信号的响应曲线和响应曲线局部放大图如上图(a)(b)所示;该条件下控制输入由©图所示,可看出控制输入相对平滑,在遇到扰动时有相应的切换控制输入保证火箭炮位置环的稳定。
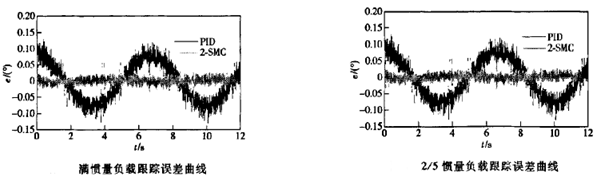
上图中PID表示使用PID加二阶前馈控制响应曲线,2-SMC表示采用基于二阶滑模控制的递阶控制策略的响应曲线。结果表明,该控制策略可以有效抑制防空火箭炮系统的参数摄动与外部扰动造成的影响,输入控制曲线相对平滑,控制器的可行性、实时性和控制精度皆能满足指标的要求,与传统的控制策略相比,有一定的优势与应用价值。
三.多智能体系统:
(1)多智能体系统原理:
一个多智能体系统(multi-agent system,缩写M.A.S.),是由在一个环境中交互的多个智能体组成的计算系统。多智能体系统也能被用在解决分离的智能体以及单层系统难以解决的问题[4]。
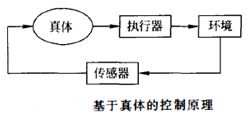
多智能体系统具有如下特点:数据分布或分散,计算过程异步、并发或并行,每个智能体具有不完全的信息和问题求解能力,不存在全局控制。在多智能体系统的研究过程中,适应不同的应用环境而从不同角度提出了多种类型的多智能体模型,包括理性智能体的BDI模型、协商模型、协作规划模型和自协调模型等。多智能体系统的体系结构影响单个智能体内部的协作智能的存在,其结构选择影响系统的异步性、一致性、自主性和自适应性的程度,并决定信息的存储方式、共享方式和通信方式。体系结构中必须有共同的通信协议或传递机制。
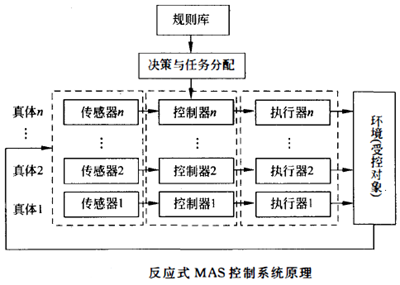
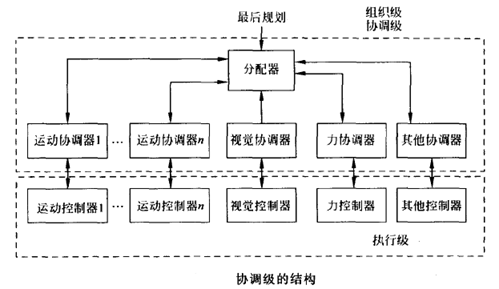
当采用多智能体系统进行控制时,其控制原理随着智能体结构的不同而有所差异。迄今为止,尚难以给出一个通用的或统一的多智能体控制系统结构。上图表示了一种反应式多智能体控制系统原理结构图,它由多层智能体构成,即由多个面向任务的专用智能体模块组成。与慎思式智能体系统不同之处在于:本控制系统没有功能分解,只有任务划分;各专用智能体模块负责执行具体任务,完成具体的动作或行为。在系统底层的专用智能体模块是基本模块,完成比较初级的任务;而比较高层的智能体模块,执行更复杂的任务。此外,每个专用智能体模块可独立工作,高层智能体模块可与底层智能体模块的任务子集协同工作。
反应式多智能体控制系统结构简单,开发费用较低;但也存在一些不足之处,如没有学习和规划能力,而且简单的分层结构不能表示复杂的模型,不宜用于比较复杂的控制系统。
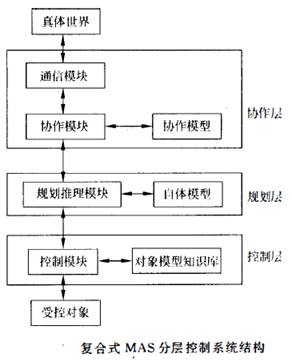
对于具有比较复杂控制任务的系统,需要采用慎思式或复合式MAS控制系统结构。上图表示了一种复合式MAS分层控制系统结构,除感知和动作等功能外,还具有建模、规划、推理、通信和协作等功能。图中,自上而下依次为协作层(模块)、规划层(模块)和控制层(模块);各层(模块)具有相应的精神模型或知识模型,从上至下分别是协作模型、自体模型和对象模型。
(2)多智能体系统的应用:
① 基于MAS的弹药装填机器人运动控制系统[6]
在一个复杂系统中,系统整体往往可由许多个智能体按一定规则结合而成,通过采用基于协商的决策这就是多智能体系统(Multi-Agent System,MAS),它能够在相同环境中得到多种的解决问题方法,具有并行性、智能性和柔性。 对于具有高智能特性的7自由度弹药装填机器人来讲由于对机器人的鲁棒性要求较高,所以运动控制的过程十分复杂。
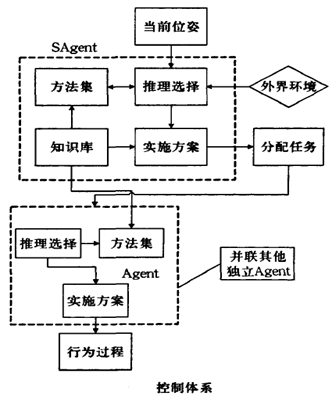
采用分布式的控制体系如上图所示,主要思想就是:在协调SAgent收到工作的任务目标的时候,通过知识库得出各个Agent的子任务目标,以及各Agent协调工作顺序的相关信息,并立即将其传递给每一个Agent:然后单个Agent在自己的知识目标中找到子任务目标,以及相关的规划信息,根据当前所有信息得出完成方案并执行。执行过程中实时的将信息传递到每个Agent以及SAgent处,实时的优化运动方案。
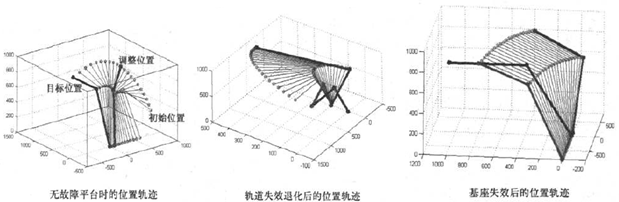
从上图轨道Agent失效后弹药装填机器人的退化后的轨迹和实时姿态可以看出轨道故障后弹药装填机器人仍然能够到达预定的装填位置完成装填的任务。基座Agent失效后弹药装填机器人退化后无法达到预定的位置,此时SAgent在收到信息后根据算法绘出另外的目标Si,然后各个子Agent得出运行轨迹如上图所示。
根据图像显示根据.基于MAS的运动控制方法能够简单的进行柔性控制达到机器人整体鲁棒性能的提高。弹药装填机器人完成预定的装填目标时,将装填任务分解各个Agent的子任务,而各个Agent又独立完成子任务并由SAgent进行时钟协调运动控制最终完成预定目标。
② 基于MAS的无人机新型编队算法[7]
该算法既适用于领导者又适用于跟随者,并且可随机指定无人机为领导者,领导者可以受到跟随者导航反馈的影响,提高了系统的适应性和可伸缩性。
假设无人机群中只存在一部分领导者,剩余个体为跟随者,则:
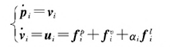
系数αi是一个事件触发变量,当无人机i接收全局轨迹信息(是领导者)时,αi=1;如果无人机i是跟随者时,αi=0。基于上式,无人机i分布式控制协议设计为:

其中,b1、b2、b3为正常数,f(uid,vid,pid)是全局轨迹信息,以aij是相邻的权重系数,pid、vid、uid分别为期望的位置、速度、加速度。如果无人机i是领导者,则意味着αi=1,那么fip和fiv是来自跟随者的反馈。
若只考虑水平运动一致性,则可得:

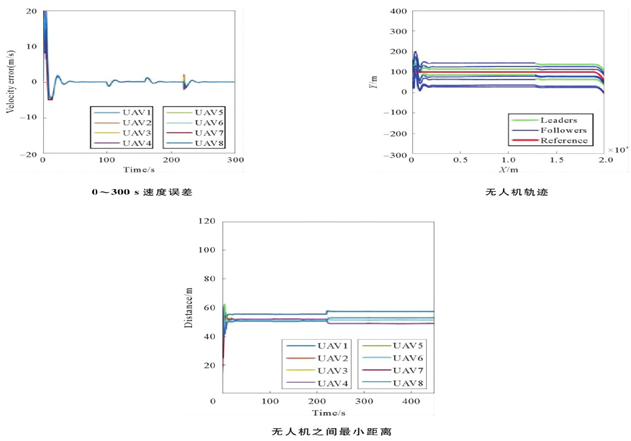
结果表明,初始交互图是连通的情况下,无人机编队可以很好地完成轨迹与速度的渐近追踪并且不会发生碰撞。通过数值模拟验证了速度与轨迹跟踪能力,即便轨迹变化剧烈,也能以期望的速度跟踪预定的轨迹。
四.专家PID控制系统、递阶控制系统、多智能体系统的对比分析:
① 专家PID控制适用于较简单的控制系统,系统的输出按给定值控制,对扰动的抵抗性较好,与另外两种控制方式相比不需要过于复杂的算法,但是系统智能程度较低;
② 递阶控制系统由三个基本控制级组成,由智能程度最高的组织级作为系统的首脑、协调级作为上下级接口、由智能程度最低但动作精度高的执行级对运动过程进行控制,递阶控制系统对于出现的扰动有较快的响应与较好的补偿,系统的精度也较高,可以用于需要进行快速反应的自动控制系统;
③ 多智能体系统要求系统由多个智能体组成,智能体之间相互配合,是三种控制方法中智能程度最高的控制方法,多智能体系统对于各独立部分的损坏、失常具有灵活的调节能力,往往在系统某部分不工作时也能够较高精度的完成系统控制指标,也可用于无人机或水下机器人的群体控制。多智能体系统与其他两种控制方法相比适用范围更广,在许多行业都有多智能体系统的应用。
参考文献:
[1]《先进PID控制MATLAB仿真》(第二版)–刘金琨–电子工业出版社;
[2]《应用专家PID实现某矿山半自磨机的控制》–王金凤,蔡国良,关长亮,张春明–《金属矿山》2019年第7期;
[3]《组合秤步进电机的智能调控方法应用》–安世奇,阮俊林–《电子测量技术》第42卷第15期2019年8月;
[4]《智能控制原理与应用》–蔡自兴–清华大学出版社;
[5]《防空火箭炮递阶控制策略设计》–扬帆,马大为,乐贵高,姚佳–《兵工学报》–第33卷第6期2012年6月;
[6]《基于MAS的弹药装填机器人运动控制研究》–徐达,帅元,韩振飞,夏祥–《制造业自动化》–第33卷第6期2011-6(上);
[7]《基于MAS的无人机新型编队算法》–王潇,纪志坚–《复杂系统与复杂性科学》–第16卷第2期2019年6月;
最后
以上就是优美老师最近收集整理的关于调查报告:运动控制中常用的控制算法的全部内容,更多相关调查报告:运动控制中常用内容请搜索靠谱客的其他文章。








发表评论 取消回复