文章目录
- 1 简介
- 2 项目介绍
- 3 具体实现
- 3.1 整体架构
- 3.2 MPU6050
- 3.2.1 什么是MPU6050
- 3.2.2 MPU6050的特点:
- 4 如何实现记步
- 4.1 峰值判断记步法
- 4.2 动态阈值记步法
- 4.3 动态阈值判断法
- 5 软件设计
- 5.1 卡尔曼滤波
- 5.2 记步算法
- 6 部分相关代码
- 7 最后
1 简介
Hi,大家好,这里是丹成学长,今天向大家介绍一个学长做的单片机项目
基于 STM32 的电子计步器的设计与实现
大家可用于 课程设计 或 毕业设计
单片机-嵌入式毕设选题大全及项目分享:
https://blog.csdn.net/m0_71572576/article/details/125409052
2 项目介绍
学长给大家介绍如何设计出一款高精度、便携的计步器。
主要难点在于数据滤波算法以及计步检测算法的实现。
首先,我们需要分析几种数据滤波的方法,我选择了比较适合的卡尔曼滤波算法。
接着,分析现有的几种计步检测算法,包括动态阈值算法和峰值检测算法。
这些算法都不是很准确,所以学长设计了一种新的计步检测算法,提高了计步检测的精度,为其他研究者在步数检测方面提供了一种较好的解决方案。
最后,采用了TFT彩屏的人机交互界面,可以实时显示卡路里、时间以及步数。
3 具体实现
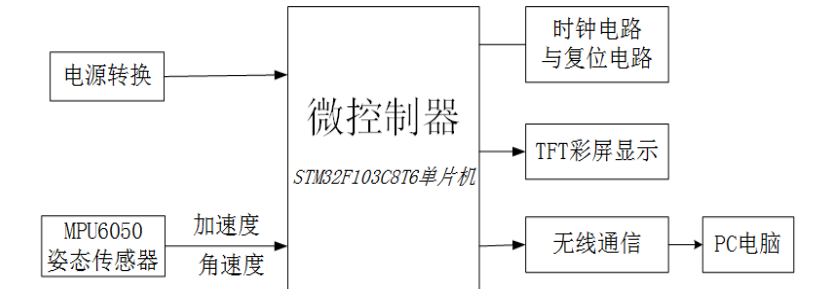
3.1 整体架构
电子计步器需要对大量的数据进行处理,所以需要采用一款运算性能较强的单片机作为主处理器。电子计步器主要是对人体位置的移动进行评估,因此需要选择一款合适的姿态传感器。主处理器通过姿态传感器得到加速度信号和角速度信号,对这两种信号进行处理,得到相对准确的角度变化。主处理器再对角度信号进行步数检测,得到准确的步伐。此外,可以添加显示屏、按键以及无线通信,方便数据的显示以及调试。
3.2 MPU6050
3.2.1 什么是MPU6050
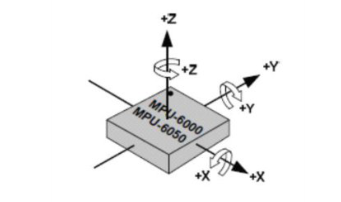
MPU6050是InvenSense公司推出的全球首款整合性6轴运动处理组件,内带3轴陀螺仪和3轴加速度传感器,并且含有一个第二IIC接口,可用于连接外部磁力传感器,利用自带数字运动处理器(DMP: Digital Motion Processor)硬件加速引擎,通过主IIC接口,可以向应用端输出完整的9轴姿态融合演算数据。
有了DMP,我们可以使用InvenSense公司提供的运动处理资料库,非常方便的实现姿态解算,降低了运动处理运算对操作系统的负荷,同时大大降低了开发难度 。
3.2.2 MPU6050的特点:
-
①自带数字运动处理( DMP: Digital Motion Processing ),可以输出6轴或9轴(需外接磁传感器)姿态解算数据。
-
②集成可程序控制,测量范围为±250、±500、±1000与±2000°/sec 的3轴角速度感测器(陀螺仪)
-
③集成可程序控制,范围为±2g、±4g、±8g和±16g的3轴加速度传感器
-
④自带数字温度传感器
-
⑤可输出中断(interrupt),支持姿势识别、摇摄、画面放大缩小、滚动、快速下降中断、high-G中断、零动作感应、触击感应、摇动感应功能
-
⑥自带1024字节FIFO,有助于降低系统功耗
-
⑦高达400Khz的IIC通信接口
-
⑧超小封装尺寸:4x4x0.9mm(QFN)
4 如何实现记步
要实现步数检测首先需要对人行走和跑步时的姿态有一定的了解。人体在行走时,身体各部分都在运动,都会产生相应的周期性正弦加速度信号。一般来讲,用脚部的加速度信号进行对步数的检测,是比较准确的。但考虑到美观性以及携带方便性,一般不将计步器佩戴在脚部。目前大部分计步器是利用手腕或腰部的运动来检测步数。
人体运动模型
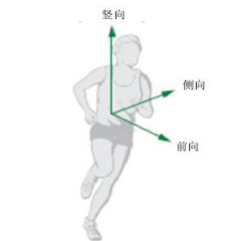
在分析行走的特征参数时,通常选择加速度和角速度作为相关变量。MEMS惯性传感器中包括加速度三个轴和陀螺仪三个轴,分别与人体运动的三个方向相对应。在表征加速度和角速度时,通常要选择变化最明显的轴。在实际场合时,因为传感器的佩戴位置不同,传感器的的测量值并不直接对应人体运动的三个方向,而对应传感器三个轴上的投影值。因此不应该简单地认为行走时某轴的变化一定最大,而应该通过观察MEMS惯性传感器的原始数据来提取合适的加速度和角速度信号。
4.1 峰值判断记步法
一是峰值判断法,每走一步角度信号会有一个相对明显的峰谷值,所以可以通过对角度的峰值检测,得到有效的行走步数。正弦信号的峰值处一般就是拐点,此处的斜率为零。但是由于采样频率有限,采样数据呈现离散的状况,所以只能根据相邻两个采样点的斜率是否趋近于零,来判断峰值的出现。只有当峰值两侧的正斜率点和负斜率点数目相等时,才认定为走了有效的一步。
4.2 动态阈值记步法
二是动态阈值判断法,当角度数值从大到小或从小到大穿越某个设定值时,可认定为走了一步,这个设定值称作阈值。因为周围环境会对人的步伐大小产生影响,阈值最好是根据实时采样数据计算得到的。一般取最小值和最大值的平均数、取一段时间内采样数据的中位数作为动态阈值。只有当相近的采样值连线呈现下降态势且穿过动态阈值,才可以记为有效的一步。对于峰值判断法来讲,一些毛刺噪声会被误判为峰值,从而影响步伐检测的精度。
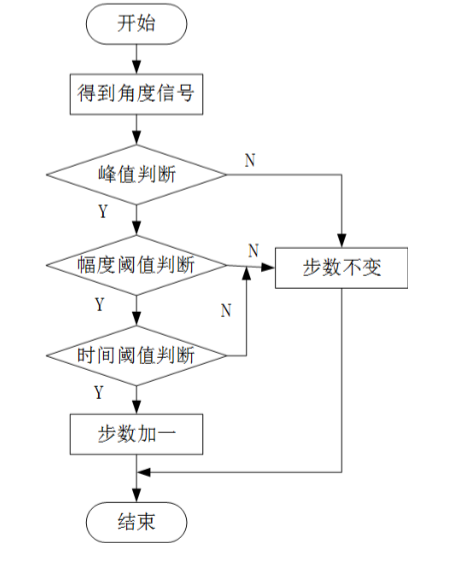
4.3 动态阈值判断法
对于动态阈值判断法来讲,当人体步伐大小发生改变时,会漏掉一些步伐。
所以将峰值检测和动态阈值结合起来,并且将时间窗加入其中,可以滤除一些无效振动并且可以更准确地判断出峰值。
由于,快跑的最快频率约为每秒5步,慢走的最慢频率约为每秒0.5步,所以将峰值附近0.2S~2S之间的数据作为有效数据,超过这个范围的数据均看作无效数据。
之后将峰值相邻的有效数据再进行一次比较,确保找到真实的峰值以及比较合适的阈值,保证步伐检测的精准度。
5 软件设计
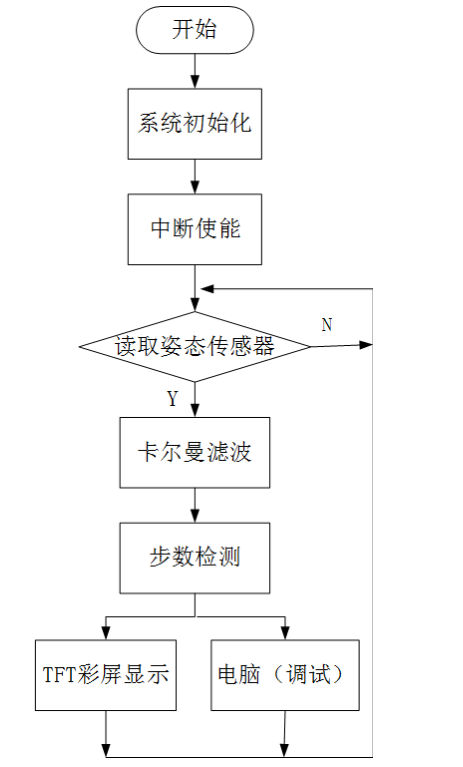
整个系统软件执行后,首先进行的是系统初始化,其中包括了定时器的初始化、TFT彩屏初始化、IO口的初始化、MPU6050初始化、串口初始化等。然后再进行MPU6050原始数据(加速度信号和角速度信号)的读取,如果没有读取到数据则等待。当读取到加速度信号和角速度信号之后,将它们转化成角度信号,进行卡尔曼滤波。接着对经过滤波、融合的角度数据进行步数检测。检测得到的步数可以通过无线通信发送给电脑进行调试,也可以发送给TFT彩屏显示。
5.1 卡尔曼滤波
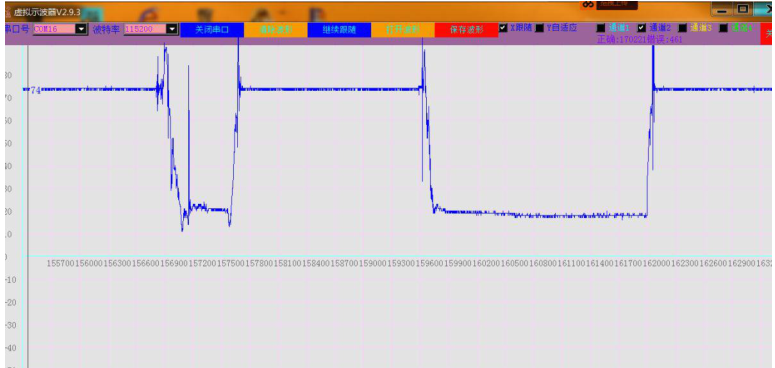
卡尔曼是经典数据滤波算法,现成资料很多就不细讲原理了,直接上结果。
滤波前的X轴数据:
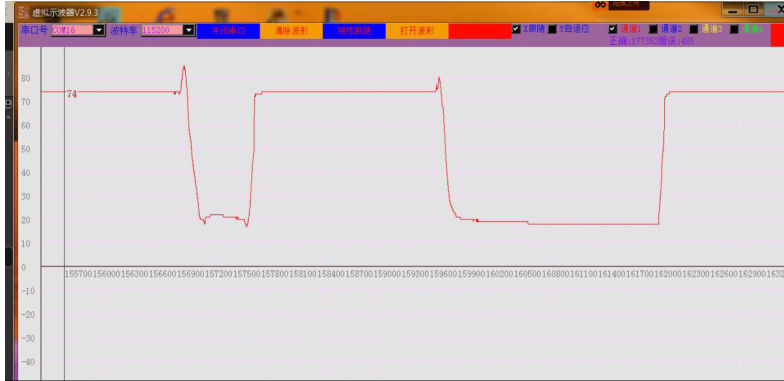
滤波后的X轴数据:
5.2 记步算法

6 部分相关代码
1. MPU6050.h
#ifndef __MPU6050_H_
#define __MPU6050_H_
#include "common.h"
#include "ioremap.h"
#include "stm32f10x.h"
#include "delay.h"
#include "uart.h"
#define MPU_ACK_WAIT_TIME 200 //us
#define MPU6050_ADDRESS_AD0_LOW 0xD0 // AD0为低的时候设备的写地址
#define MPU6050_ADDRESS_AD0_HIGH 0XD1 // AD0为高的时候设备的写地址
#define MPU_ADDR 0xD0 //IIC写入时的地址字节数据
#define MPU_DEBUG 1
//技术文档未公布的寄存器 主要用于官方DMP操作
#define MPU6050_RA_XG_OFFS_TC 0x00 //[bit7] PWR_MODE, [6:1] XG_OFFS_TC, [bit 0] OTP_BNK_VLD
#define MPU6050_RA_YG_OFFS_TC 0x01 //[7] PWR_MODE, [6:1] YG_OFFS_TC, [0] OTP_BNK_VLD
//bit7的定义,当设置为1,辅助I2C总线高电平是VDD。当设置为0,辅助I2C总线高电平是VLOGIC
#define MPU6050_RA_ZG_OFFS_TC 0x02 //[7] PWR_MODE, [6:1] ZG_OFFS_TC, [0] OTP_BNK_VLD
#define MPU6050_RA_X_FINE_GAIN 0x03 //[7:0] X_FINE_GAIN
#define MPU6050_RA_Y_FINE_GAIN 0x04 //[7:0] Y_FINE_GAIN
#define MPU6050_RA_Z_FINE_GAIN 0x05 //[7:0] Z_FINE_GAIN
#define MPU6050_RA_XA_OFFS_H 0x06 //[15:0] XA_OFFS 两个寄存器合在一起
#define MPU6050_RA_XA_OFFS_L_TC 0x07
#define MPU6050_RA_YA_OFFS_H 0x08 //[15:0] YA_OFFS 两个寄存器合在一起
#define MPU6050_RA_YA_OFFS_L_TC 0x09
#define MPU6050_RA_ZA_OFFS_H 0x0A //[15:0] ZA_OFFS 两个寄存器合在一起
#define MPU6050_RA_ZA_OFFS_L_TC 0x0B
#define MPU6050_RA_XG_OFFS_USRH 0x13 //[15:0] XG_OFFS_USR 两个寄存器合在一起
#define MPU6050_RA_XG_OFFS_USRL 0x14
#define MPU6050_RA_YG_OFFS_USRH 0x15 //[15:0] YG_OFFS_USR 两个寄存器合在一起
#define MPU6050_RA_YG_OFFS_USRL 0x16
#define MPU6050_RA_ZG_OFFS_USRH 0x17 //[15:0] ZG_OFFS_USR 两个寄存器合在一起
#define MPU6050_RA_ZG_OFFS_USRL 0x18
/*陀螺仪的采样频率*/
/*传感器的寄存器输出,FIFO输出,DMP采样、运动检测、
*零运动检测和自由落体检测都是基于采样率。
*通过SMPLRT_DIV把陀螺仪输出率分频即可得到采样率
*采样率=陀螺仪输出率/ (1 + SMPLRT_DIV)
*禁用DLPF的情况下(DLPF_CFG = 0或7) ,陀螺仪输出率= 8 khz
*在启用DLPF(见寄存器26)时,陀螺仪输出率= 1 khz
*加速度传感器输出率是1 khz。这意味着,采样率大于1 khz时,
*同一个加速度传感器的样品可能会多次输入到FIFO、DMP和传感器寄存器*/
#define MPU6050_RA_SMPLRT_DIV 0x19 //[0-7] 陀螺仪输出分频采样率
/*配置外部引脚采样和DLPF数字低通滤波器*/
#define MPU6050_RA_CONFIG 0x1A
//bit5-bit3 一个连接到FSYNC端口的外部信号可以通过配置EXT_SYNC_SET来采样
// 也就是说,这里设置之后,FSYNC的电平0或1进入最终数据寄存器,具体如下
// 0 不使用 1 FSYNC电平进入所有数据寄存器 2 FSYNC电平进入GYRO_XOUT_L 3 FSYNC电平进入GYRO_YOUT_L
// 4 FSYNC电平进入GYRO_ZOUT_L 5 FSYNC电平进入ACCEL_XOUT_L 6 FSYNC电平进入ACCEL_YOUT_L
// 7 FSYNC电平进入SYNC_ACCEL_ZOUT_L
//bit2-bit0 数字低通滤波器 用于滤除高频干扰 高于这个频率的干扰被滤除掉
/*对应关系如下
* * | 加速度传感器 | 陀螺仪
* * DLPF_CFG | 带宽 | 延迟 | 带宽 | 延迟 | 采样率
* -------------+--------+-------+--------+------+-------------
* 0 | 260Hz | 0ms | 256Hz | 0.98ms | 8kHz
* 1 | 184Hz | 2.0ms | 188Hz | 1.9ms | 1kHz
* 2 | 94Hz | 3.0ms | 98Hz | 2.8ms | 1kHz
* 3 | 44Hz | 4.9ms | 42Hz | 4.8ms | 1kHz
* 4 | 21Hz | 8.5ms | 20Hz | 8.3ms | 1kHz
* 5 | 10Hz | 13.8ms | 10Hz | 13.4ms | 1kHz
* 6 | 5Hz | 19.0ms | 5Hz | 18.6ms | 1kHz
* 7 | Reserved | Reserved | Reserved
* */
/*陀螺仪的配置,主要是配置陀螺仪的量程与自检(通过相应的位7 6 5 开启自检)*/
#define MPU6050_RA_GYRO_CONFIG 0x1B
//bit4-bit3 量程设置如下
// 0 = +/- 250 度/秒
// 1 = +/- 500 度/秒
// 2 = +/- 1000 度/秒
// 3 = +/- 2000 度/秒*/
/*加速度计的配置,主要是配置加速度计的量程与自检(通过相应的位7 6 5 开启自检)
*另外,还能配置系统的高通滤波器*/
#define MPU6050_RA_ACCEL_CONFIG 0x1C
//bit7 启动X自检 加速度计的自检
//bit6 启动Y自检
//bit5 启动Z自检
//bit4-bit3 加速度传感器的量程配置
// 0 = +/- 2g
// 1 = +/- 4g
// 2 = +/- 8g
// 3 = +/- 16g*/
//bit0到bit2 加速度传感器的高通滤波器
/*DHPF是在路径中连接于运动探测器(自由落体,运动阈值,零运动)的一个滤波器模块。
*高通滤波器的输出值不在数据寄存器中
*高通滤波器有三种模式:
*重置:在一个样本中将滤波器输出值设为零。这有效的禁用了高通滤波器。这种模式可以快速切换滤波器的设置模式。
*开启:高通滤波器能通过高于截止频率的信号
*持续:触发后,过滤器持续当前采样。过滤器输出值是输入样本和持续样本之间的差异
*设置值如下所示
* ACCEL_HPF | 高通滤波模式| 截止频率
* ----------+-------------+------------------
* 0 | Reset | None
* 1 | On | 5Hz
* 2 | On | 2.5Hz
* 3 | On | 1.25Hz
* 4 | On | 0.63Hz
* 7 | Hold | None
*/
#define MPU6050_RA_FF_THR 0x1D
/*自由落体加速度的阈值
*这个寄存器为自由落体的阈值检测进行配置。
*FF_THR的单位是1LSB = 2mg。当加速度传感器测量而得的三个轴的绝对值
*都小于检测阈值时,就可以测得自由落体值。这种情况下,(加速度计每次检测到就+1以下,所以还要依靠加速度采样率)
*自由落体时间计数器计数一次 (寄存器30)。当自由落体时间计数器达到
*FF_DUR中规定的时间时,自由落体被中断(或发生自由落体中断)
**/
#define MPU6050_RA_FF_DUR 0x1E
/*
*自由落体加速度的时间阈值
* 这个寄存器为自由落体时间阈值计数器进行配置。
* 时间计数频率为1 khz,因此FF_DUR的单位是 1 LSB = 1毫秒。
* 当加速度器测量而得的绝对值都小于检测阈值时,
* 自由落体时间计数器计数一次。当自由落体时间计数器
* 达到该寄存器的规定时间时,自由落体被中断。
* (或发生自由落体中断)
* */
#define MPU6050_RA_MOT_THR 0x1F
/*
*运动检测的加速度阈值
*这个寄存器为运动中断的阈值检测进行配置。
*MOT_THR的单位是 1LSB = 2mg。
*当加速度器测量而得的绝对值都超过该运动检测的阈值时,
*即可测得该运动。这一情况下,运动时间检测计数器计数一次。
*当运动检测计数器达到MOT_DUR的规定时间时,运动检测被中断。
* 运动中断表明了被检测的运动MOT_DETECT_STATUS (Register 97)的轴和极性。
*/
#define MPU6050_RA_MOT_DUR 0x20
/*
*运动检测时间的阈值。
*这个寄存器为运动中断的阈值检测进行配置。
*时间计数器计数频率为1 kHz ,因此MOT_THR的单位是 1LSB = 1ms。
*当加速度器测量而得的绝对值都超过该运动检测的阈值时(Register 31),
*运动检测时间计数器计数一次。当运动检测计数器达到该寄存器规定的时间时,
*运动检测被中断。
**/
#define MPU6050_RA_ZRMOT_THR 0x21
/*
*零运动检测加速度阈值。
* 这个寄存器为零运动中断检测进行配置。
* ZRMOT_THR的单位是1LSB = 2mg。
* 当加速度器测量而得的三个轴的绝对值都小于检测阈值时,
* 就可以测得零运动。这种情况下,零运动时间计数器计数一次 (寄存器34)。
* 当自零运动时间计数器达到ZRMOT_DUR (Register 34)中规定的时间时,零运动被中断。
* 与自由落体或运动检测不同的是,当零运动首次检测到以及当零运动检测不到时,零运动检测都被中断。
* 当零运动被检测到时,其状态将在MOT_DETECT_STATUS寄存器(寄存器97) 中显示出来。
* 当运动状态变为零运动状态被检测到时,状态位设置为1。当零运动状态变为运动状态被检测到时,
* 状态位设置为0。
**/
#define MPU6050_RA_ZRMOT_DUR 0x22
/*
*零运动检测的时间阈值
* 这个寄存器为零运动中断检测进行时间计数器的配置。
* 时间计数器的计数频率为16 Hz,因此ZRMOT_DUR的单位是1 LSB = 64 ms。
* 当加速度器测量而得的绝对值都小于检测器的阈值(Register 33)时,
* 运动检测时间计数器计数一次。当零运动检测计数器达到该寄存器规定的时间时,
* 零运动检测被中断。
**/
/*
*设备的各种FIFO使能,包括温度 加速度 陀螺仪 从机
*将相关的数据写入FIFO缓冲中
**/
#define MPU6050_RA_FIFO_EN 0x23
//bit7 温度fifo使能
//bit6 陀螺仪Xfifo使能
//bit5 陀螺仪Yfifo使能
//bit4 陀螺仪Zfifo使能
//bit3 加速度传感器fifo使能
//bit2 外部从设备2fifo使能
//bit1 外部从设备1fifo使能
//bit0 外部从设备0fifo使能
#define MPU6050_RA_I2C_MST_CTRL 0x24
//配置单主机或者多主机下的IIC总线
//bit7 监视从设备总线,看总线是否可用 MULT_MST_EN设置为1时,MPU-60X0的总线仲裁检测逻辑被打开
//bit6 延迟数据就绪中断,直达从设备数据也进入主机再触发 相当于数据同步等待
//bit5 当设置为1时,与Slave3 相连的外部传感器数据(寄存器73 到寄存器 96)写入FIFO缓冲中,每次都写入
//bit4 主机读取一个从机到下一个从机读取之间的动作 为0 读取之间有一个restart,为1 下一次读取前会有一个重启,然后
// 一直读取直到切换写入或者切换设备
//bit3-bit0 配置MPU作为IIC主机时的时钟,基于MPU内部8M的分频
/* I2C_MST_CLK | I2C 主时钟速度 | 8MHz 时钟分频器
* ------------+------------------------+-------------------
* 0 | 348kHz | 23
* 1 | 333kHz | 24
* 2 | 320kHz | 25
* 3 | 308kHz | 26
* 4 | 296kHz | 27
* 5 | 286kHz | 28
* 6 | 276kHz | 29
* 7 | 267kHz | 30
* 8 | 258kHz | 31
* 9 | 500kHz | 16
* 10 | 471kHz | 17
* 11 | 444kHz | 18
* 12 | 421kHz | 19
* 13 | 400kHz | 20
* 14 | 381kHz | 21
* 15 | 364kHz | 22
* */
/**************************MPU链接IIC从设备控制寄存器,没使用从机连接的基本不用考虑这些************************************/
/*指定slave (0-3)的I2C地址
* 注意Bit 7 (MSB)控制了读/写模式。如果设置了Bit 7,那么这是一个读取操作,
* 如果将其清除,那么这是一个编写操作。其余位(6-0)是slave设备的7-bit设备地址。
* 在读取模式中,读取结果是存储于最低可用的EXT_SENS_DATA寄存器中。
* MPU-6050支持全5个slave,但Slave 4有其特殊功能(getSlave4* 和setSlave4*)。
* 如寄存器25中所述,I2C数据转换通过采样率体现。用户负责确保I2C数据转换能够
* 在一个采样率周期内完成。
* I2C slave数据传输速率可根据采样率来减小。
* 减小的传输速率是由I2C_MST_DLY(寄存器52)所决定的。
* slave数据传输速率是否根据采样率来减小是由I2C_MST_DELAY_CTRL (寄存器103)所决定的。
* slave的处理指令是固定的。Slave的处理顺序是Slave 1, Slave 2, Slave 3 和 Slave 4。
* 如果某一个Slave被禁用了,那么它会被自动忽略。
* 每个slave可按采样率或降低的采样率来读取。在有些slave以采样率读取有些以减小
* 的采样率读取的情况下,slave的读取顺序依旧不变。然而,
* 如果一些slave的读取速率不能在特定循环中进行读取,那么它们会被自动忽略
* 更多降低的读取速率相关信息,请参阅寄存器52。
* Slave是否按采样率或降低的采样率来读取由寄存器103得Delay Enable位来决定
**/
//从机0设置相关
#define MPU6050_RA_I2C_SLV0_ADDR 0x25
//bit7 当前IIC 从设备0的操作,1为读取 0写入
//bit6-bit0 从机设备的地址
/* 要读取或者要写入的设备内部的寄存器地址,不管读取还是写入*/
#define MPU6050_RA_I2C_SLV0_REG 0x26
/*iic从机系统配置寄存器*/
#define MPU6050_RA_I2C_SLV0_CTRL 0x27
//bit7 启动或者禁止这个设备的IIC数据传送过程
//bit6 当设置为1时,字节交换启用。当启用字节交换时,词对的高低字节即可交换
//bit5 当 I2C_SLV0_REG_DIS 置 1,只能进行读取或者写入数据。当该位清 0,可以再读取
// 或写入数据之前写入一个寄存器地址。当指定从机设备内部的寄存器地址进行发送或接收
// 数据时,该位必须等于 0
//bit4 指定从寄存器收到的字符对的分组顺序。当该位清 0,寄存器地址
// 0和 1, 2 和 3 的字节是分别成对(甚至,奇数寄存器地址 ) ,作为一个字符对。当该位置 1,
// 寄存器地址 1 和 2, 3 和 4 的字节是分别成对的,作为一个字符对
//bit3-bit0 指定从机 0 发送字符的长度。由Slave 0转换而来和转换至Slave 0的字节数,(IIC一次传输的长度)
// 该位清 0,I2C_SLV0_EN 位自动置 0.
/*IIC SLAVE1配置寄存器,与0相同*/
#define MPU6050_RA_I2C_SLV1_ADDR 0x28
#define MPU6050_RA_I2C_SLV1_REG 0x29
#define MPU6050_RA_I2C_SLV1_CTRL 0x2A
/*IIC SLAVE2配置寄存器,与0相同*/
#define MPU6050_RA_I2C_SLV2_ADDR 0x2B
#define MPU6050_RA_I2C_SLV2_REG 0x2C
#define MPU6050_RA_I2C_SLV2_CTRL 0x2D
/*IIC SLAVE3配置寄存器,与0相同*/
#define MPU6050_RA_I2C_SLV3_ADDR 0x2E
#define MPU6050_RA_I2C_SLV3_REG 0x2F
#define MPU6050_RA_I2C_SLV3_CTRL 0x30
/*slave4的I2C地址 IIC4与前几个的寄存器定义有所不同*/
#define MPU6050_RA_I2C_SLV4_ADDR 0x31 //与IIC SLAVE1类似
#define MPU6050_RA_I2C_SLV4_REG 0x32 /*slave4的当前内部寄存器*/
#define MPU6050_RA_I2C_SLV4_DO 0x33
/*写于slave4的新字节这一寄存器可储存写于slave4的数据。
* 如果I2C_SLV4_RW设置为1(设置为读取模式),那么该寄存器无法执行操作*/
#define MPU6050_RA_I2C_SLV4_CTRL 0x34
//当设置为1时,此位启用了slave4的转换操作。当设置为0时,则禁用该操作
#define MPU6050_I2C_SLV4_EN_BIT 7
//当设置为1时,此位启用了slave4事务完成的中断信号的生成。
// 当清除为0时,则禁用了该信号的生成。这一中断状态可在寄存器54中看到。
#define MPU6050_I2C_SLV4_INT_EN_BIT 6
//当设置为1时,只进行数据的读或写操作。当设置为0时,
// 在读写数据之前将编写一个寄存器地址。当指定寄存器地址在slave设备中时
// ,这应该等于0,而在该寄存器中会进行数据处理。
#define MPU6050_I2C_SLV4_REG_DIS_BIT 5
//采样率延迟,这为根据采样率减小的I2C slaves传输速率进行了配置。
// 当一个slave的传输速率是根据采样率而降低的,那么该slave是以每1 / (1 + I2C_MST_DLY) 个样本进行传输。
// 这一基本的采样率也是由SMPLRT_DIV (寄存器 25)和DLPF_CFG (寄存器26)所决定的的。
// slave传输速率是否根据采样率来减小是由I2C_MST_DELAY_CTRL (寄存器103)所决定的
#define MPU6050_I2C_SLV4_MST_DLY_BIT 4 //[4:0]
#define MPU6050_I2C_SLV4_MST_DLY_LENGTH 5
/*slave4中可读取的最后可用字节*/
#define MPU6050_RA_I2C_SLV4_DI 0x35
/*
* IIC辅助从机系统中断状态
**/
#define MPU6050_RA_I2C_MST_STATUS 0x36
//bit7 此位反映了一个与MPU-60X0相连的外部设备的FSYNC中断状态。
// 当设置为1且在INT_PIN_CFG(寄存器55)中断言FSYNC_INT_EN时,中断产生。
//bit6 当slave4事务完成时,设备会自动设置为1 如果定义了INT_ENABLE中的I2C_MST_INT_EN则产生中断
//bit5 I2C主机失去辅助I2C总线(一个错误状态)的仲裁,此位自动设置为1.如果断言了INT_ENABLE寄存器
// (寄存器56)中的I2C_MST_INT_EN位,则中断产生
//bit4 slave4的NACK状态
//bit3 slave3的NACK状态
//bit2 slave2的NACK状态
//bit1 slave1的NACK状态
//bit0 slave0的NACK状态
/*中断引脚配置寄存器*/
#define MPU6050_RA_INT_PIN_CFG 0x37
//bit7 中断的逻辑电平模式,高电平时,设置为0;低电平时,设置为1
//bit6 中断驱动模式,推拉模式设置为0,开漏模式设置为1.
//bit5 中断锁存模式.50us-pulse模式设置为0,latch-until-int-cleared模式设置为1
//bit4 中断锁存清除模式 status-read-only状态设置为0,any-register-read状态设置为1.
//bit3 FSYNC中断逻辑电平模式 0=active-high, 1=active-low
//bit2 FSYNC端口中断启用设置设置为0时禁用,设置为1时启用
//bit1 I2C支路启用状态,此位等于1且I2C_MST_EN (寄存器 106 位[5])等于0时,主机应用程序处理器能够直接访问MPU-60X0的辅助I2C总线
// 否则无论如何都不能直接访问
//bit0 当此位为1时,CLKOUT端口可以输出参考时钟。当此位为0时,输出禁用
/*部分中断使能*/
#define MPU6050_RA_INT_ENABLE 0x38
//bit7 自由落体中断使能
//bit6 运动检测中断使能
//bit5 零运动检测中断使能
//bit4 FIFO溢出中断使能
//bit3 IIC主机所有中断源使能
//bit0 数据就绪中断使能
/*DMP中断使能*/
#define MPU6050_RA_DMP_INT_STATUS 0x39
//不知道这些位的具体作用是什么,官方语焉不详,但是的确存在
#define MPU6050_DMPINT_4_BIT 4
#define MPU6050_DMPINT_3_BIT 3
#define MPU6050_DMPINT_2_BIT 2
#define MPU6050_DMPINT_1_BIT 1
#define MPU6050_DMPINT_0_BIT 0
/*DMP中断配置*/
#define MPU6050_RA_INT_STATUS 0x3A
//DMP中断位之一使能
#define MPU6050_INTERRUPT_PLL_RDY_INT_BIT 2
//DMP中断位之二使能
#define MPU6050_INTERRUPT_DMP_INT_BIT 1
/*加速度X输出*/
#define MPU6050_RA_ACCEL_XOUT_H 0x3B
#define MPU6050_RA_ACCEL_XOUT_L 0x3C
/*加速度Y输出*/
#define MPU6050_RA_ACCEL_YOUT_H 0x3D
#define MPU6050_RA_ACCEL_YOUT_L 0x3E
/*加速度Z输出*/
#define MPU6050_RA_ACCEL_ZOUT_H 0x3F
#define MPU6050_RA_ACCEL_ZOUT_L 0x40
/*温度值输出*/
#define MPU6050_RA_TEMP_OUT_H 0x41
#define MPU6050_RA_TEMP_OUT_L 0x42
/*陀螺仪X输出*/
#define MPU6050_RA_GYRO_XOUT_H 0x43
#define MPU6050_RA_GYRO_XOUT_L 0x44
/*陀螺仪Y输出*/
#define MPU6050_RA_GYRO_YOUT_H 0x45
#define MPU6050_RA_GYRO_YOUT_L 0x46
/*陀螺仪Z输出*/
#define MPU6050_RA_GYRO_ZOUT_H 0x47
#define MPU6050_RA_GYRO_ZOUT_L 0x48
/*从IIC从机上获取到的数据*/
#define MPU6050_RA_EXT_SENS_DATA_00 0x49
#define MPU6050_RA_EXT_SENS_DATA_01 0x4A
#define MPU6050_RA_EXT_SENS_DATA_02 0x4B
#define MPU6050_RA_EXT_SENS_DATA_03 0x4C
#define MPU6050_RA_EXT_SENS_DATA_04 0x4D
#define MPU6050_RA_EXT_SENS_DATA_05 0x4E
#define MPU6050_RA_EXT_SENS_DATA_06 0x4F
#define MPU6050_RA_EXT_SENS_DATA_07 0x50
#define MPU6050_RA_EXT_SENS_DATA_08 0x51
#define MPU6050_RA_EXT_SENS_DATA_09 0x52
#define MPU6050_RA_EXT_SENS_DATA_10 0x53
#define MPU6050_RA_EXT_SENS_DATA_11 0x54
#define MPU6050_RA_EXT_SENS_DATA_12 0x55
#define MPU6050_RA_EXT_SENS_DATA_13 0x56
#define MPU6050_RA_EXT_SENS_DATA_14 0x57
#define MPU6050_RA_EXT_SENS_DATA_15 0x58
#define MPU6050_RA_EXT_SENS_DATA_16 0x59
#define MPU6050_RA_EXT_SENS_DATA_17 0x5A
#define MPU6050_RA_EXT_SENS_DATA_18 0x5B
#define MPU6050_RA_EXT_SENS_DATA_19 0x5C
#define MPU6050_RA_EXT_SENS_DATA_20 0x5D
#define MPU6050_RA_EXT_SENS_DATA_21 0x5E
#define MPU6050_RA_EXT_SENS_DATA_22 0x5F
#define MPU6050_RA_EXT_SENS_DATA_23 0x60
//运动检测的状态
#define MPU6050_RA_MOT_DETECT_STATUS 0x61
//bit7 x轴反向运动检测中断状态
//bit6 x轴正向运动检测中断状态
//bit5 Y轴反向运动检测中断状态
//bit4 Y轴正向运动检测中断状态
//bit3 Z轴反向运动检测中断状态
//bit2 Z轴正向运动检测中断状态
//bit1
//bit0 零运动检测中断状态
//
/*写入到IIC从机中的数据,指定的slv数据输出容器*/
#define MPU6050_RA_I2C_SLV0_DO 0x63
#define MPU6050_RA_I2C_SLV1_DO 0x64
#define MPU6050_RA_I2C_SLV2_DO 0x65
#define MPU6050_RA_I2C_SLV3_DO 0x66
/*外部影子寄存器的配置,这个寄存器用于指定外部传感器数据影子的时间
*当启用了某一特定的slave,其传输速率就会减小。
*当一个slave的传输速率是根据采样率而降低的,那么该slave是以
*每1 / (1 + I2C_MST_DLY) 个样本进行传输。
* 1 / (1 + I2C_MST_DLY) Samples
* 这一基本的采样率也是由SMPLRT_DIV (寄存器 25)和DLPF_CFG (寄存器26)所决定的的。*/
#define MPU6050_RA_I2C_MST_DELAY_CTRL 0x67
//DELAY_ES_SHADOW设置为1,跟随外部传感器数据影子将会延迟到所有的数据接收完毕。
#define MPU6050_DELAYCTRL_DELAY_ES_SHADOW_BIT 7
//slv4-0的配置
#define MPU6050_DELAYCTRL_I2C_SLV4_DLY_EN_BIT 4
#define MPU6050_DELAYCTRL_I2C_SLV3_DLY_EN_BIT 3
#define MPU6050_DELAYCTRL_I2C_SLV2_DLY_EN_BIT 2
#define MPU6050_DELAYCTRL_I2C_SLV1_DLY_EN_BIT 1
#define MPU6050_DELAYCTRL_I2C_SLV0_DLY_EN_BIT 0
/*用于陀螺仪,加速度计,温度传感器的模拟和数字信号通道的复位。
复位会还原模数转换信号通道和清除他们的上电配置*/
#define MPU6050_RA_SIGNAL_PATH_RESET 0x68
//bit2 重置陀螺仪的信号路径
//bit1 重置加速度传感器的信号路径
//bit0 重置温度传感器的信号路径
/*获取加速度传感器启动延迟 还有滤波器的一些配置
* 加速度传感器数据路径为传感器寄存器、运动检测、
* 零运动检测和自由落体检测模块提供样本。在检测模块开始操作之前,
* 包含过滤器的信号路径必须用新样本来启用。
* 默认的4毫秒唤醒延迟时间可以加长3毫秒以上。在ACCEL_ON_DELAY中规定
* 这个延迟以1 LSB = 1 毫秒为单位。除非InvenSense另行指示,
* 用户可以选择任何大于零的值。*/
#define MPU6050_RA_MOT_DETECT_CTRL 0x69
//具体的有效控制位
//bit5-bit4 [5:4]1-4ms 延时时间1-4ms选择
//bit3-bit2 自由落体检测计数器的减量配置。
// 当指定数量的样本的加速度测量都满足其各自的阈值条件时,
// 检测结果存储于自由落体检测模块中。当满足阈值条件时,
// 相应的检测计数器递增1。用户可通过FF_COUNT配置不满足阈值条件来减量。
// 减量率可根据下表进行设置:
/* FF_COUNT | 计数器减量
* ---------+------------------
* 0 | 重置
* 1 | 1
* 2 | 2
* 3 | 4
* 当FF_COUNT配置为0(复位)时,任何不合格的样品都将计数器重置为0*/
//bit1-bit0 运动检测计数器的减量配置。
// 当指定数量的样本的加速度测量都满足其各自的阈值条件时,
// 检测结果存储于运动检测模块中。当满足阈值条件时,相应的检测计数器递增1。
// 用户可通过MOT_COUNT配置不满足阈值条件来减量。减量率可根据下表进行设置:
// MOT_COUNT | 计数器减量
/* ----------+------------------
* 0 | 重置
* 1 | 1
* 2 | 2
* 3 | 4
* 当MOT_COUNT配置为0(复位)时,任何不合格的样品都将计数器重置为0*/
/*这个寄存器允许用户使能或使能 FIFO 缓冲区,
*I2C 主机模式和主要 I2C 接口。FIFO 缓冲
区,I2C 主机,传感器信号通道和传感器寄存器也可以使用这个寄存器复位*/
#define MPU6050_RA_USER_CTRL 0x6A
//bit7 DMP禁止
//bit6 当此位设置为0,FIFO缓冲是禁用的
//bit5 当这个模式被启用,MPU-60X0即成为辅助I2C总线上的外部传感器slave设备的I2C主机
// 当此位被清除为0时,辅助I2C总线线路(AUX_DA and AUX_CL)理论上是由I2C总线
// (SDA和SCL)驱动的。这是启用旁路模式的一个前提
//bit4 I2C转换至SPI模式(只允许MPU-6000)
//bit3 重置DMP模式,官方文档未说明的寄存器
//bit2 重置FIFO当设置为1时,此位将重置FIFO缓冲区,此时FIFO_EN等于0。触发重置后,此位将自动清为0
//bit1 重置I2C主机当设置为1时,此位将重置I2C主机,此时I2C_MST_EN等于0。触发重置后,此位将自动清为0
//bit0 重置所有传感器寄存器和信号路径 如果只重置信号路径(不重置传感器寄存器),请使用寄存器104
/*允许用户配置电源模式和时钟源。还提供了复位整个设备和禁用温度传感器的位*/
#define MPU6050_RA_PWR_MGMT_1 0x6B
//bit7 触发一个设备的完整重置。 触发重置后,一个~ 50 毫秒的小延迟是合理的
//bit6 寄存器的SLEEP位设置使设备处于非常低功率的休眠模式。
//bit5 唤醒周期启用状态当此位设为1且SLEEP禁用时.在休眠模式和唤醒模式间循环,以此从活跃的传感器中获取数据样本
//bit3 温度传感器启用状态控制内部温度传感器的使用
//bit2-bit0 设定时钟源设置,一个频率为8 mhz的内部振荡器,基于陀螺仪的时钟或外部信息源都可以被选为MPU-60X0的时钟源
/* CLK_SEL | 时钟源
* --------+--------------------------------------
* 0 | 内部振荡器
* 1 | PLL with X Gyro reference
* 2 | PLL with Y Gyro reference
* 3 | PLL with Z Gyro reference
* 4 | PLL with external 32.768kHz reference
* 5 | PLL with external 19.2MHz reference
* 6 | Reserved
* 7 | Stops the clock and keeps the timing generator in reset
* */
/*这个寄存器允许用户配置加速度计在低功耗模式下唤起的频率。也允许用户让加速度计和
陀螺仪的个别轴进入待机模式。*/
#define MPU6050_RA_PWR_MGMT_2 0x6C
//bit7-bit6 Accel-Only低电量模式下的唤醒频率
/* 通过把Power Management 1寄存器(寄存器107)中的PWRSEL设为1,
* MPU-60X0可以处于Accerlerometer Only的低电量模式。在这种模式下,
设备将关闭除了原I2C接口以外的所有设备,只留下accelerometer以固定时间
间隔醒来进行测量。唤醒频率可用LP_WAKE_CTRL进行配置,如下表所示:
* LP_WAKE_CTRL | 唤醒频率
* -------------+------------------
* 0 | 1.25 Hz
* 1 | 2.5 Hz
* 2 | 5 Hz
* 3 | 10 Hz
* */
//bit5 备用的x轴加速度传感器启用状态,也就是进入待机模式
//bit4 备用的Y轴加速度传感器启用状态
//bit3 备用的Z轴加速度传感器启用状态
//bit2 备用的x轴陀螺仪启用状态
//bit1 备用的Y轴陀螺仪启用状态
//bit0 备用的Z轴陀螺仪启用状态
/*设定DMP模式下的bank*/
#define MPU6050_RA_BANK_SEL 0x6D
//DMP内存配置
#define MPU6050_BANKSEL_PRFTCH_EN_BIT 6
#define MPU6050_BANKSEL_CFG_USER_BANK_BIT 5
#define MPU6050_BANKSEL_MEM_SEL_BIT 4
#define MPU6050_BANKSEL_MEM_SEL_LENGTH 5
//dmp内存地址设置
#define MPU6050_DMP_MEMORY_BANKS 8
#define MPU6050_DMP_MEMORY_BANK_SIZE 256
#define MPU6050_DMP_MEMORY_CHUNK_SIZE 16
/*设定DMP模式下的起始地址*/
#define MPU6050_RA_MEM_START_ADDR 0x6E
/*一个字节的dmp数据缓存*/
#define MPU6050_RA_MEM_R_W 0x6F
/*DMP配置寄存器1*/
#define MPU6050_RA_DMP_CFG_1 0x70
/*DMP配置寄存器2*/
#define MPU6050_RA_DMP_CFG_2 0x71
/*当前FIFO缓冲区大小
* 这个值表明了存储于FIFO缓冲区的字节数。
* 而这个数字也是能从FIFO缓冲区读取的字节数,
* 它与存储在FIFO(寄存器35和36)中的传感器数据组所提供的可用样本数成正比。
* 两个寄存器一起构成一个16位数据*/
#define MPU6050_RA_FIFO_COUNTH 0x72
#define MPU6050_RA_FIFO_COUNTL 0x73
/*这个寄存器用于从FIFO缓冲区中读取和编写数据。数据在寄存器编号(从低到高)的指
*令下编写入数据写入FIFO。如果所有的FIFO启用标志(见下文)都被启用了且
*所有外部传感器数据寄存器(寄存器73至寄存器96)都与一个slave设备相连
*,那么寄存器59到寄存器96的内容都将在采样率的指令下编写。
* 当传感器数据寄存器(寄存器59到寄存器96)的相关FIFO启用标志在FIFO_EN 寄存
* 器35)中都设为1时,它们的内容将被写入FIFO缓冲区。在I2C_MST_CTRL (寄存器 36)
* 中能找到一个与I2C Slave 3相连的额外的传感器数据寄存器标志。
* 如果FIFO缓冲区溢出,状态位FIFO_OFLOW_INT自动设置为1。
* 此位位于INT_STATUS (寄存器58)中。当FIFO缓冲区溢出时,最早的数据将会丢失
* 而新数据将被写入FIFO。如果FIFO缓冲区为空, 读取将返回原来从FIFO中读取的
* 最后一个字节,直到有可用的新数据。用户应检查FIFO_COUNT,以确保不在FIFO缓冲为空时读取。*/
#define MPU6050_RA_FIFO_R_W 0x74
/*寄存器是用来验证设备的身份的 默认值是0X34*/
#define MPU6050_RA_WHO_AM_I 0x75
//bit6-bit1 设备身份验证 0x34 最高位和最低位都剔除掉
typedef struct ACCELSTRUCT
{
s16 accelX;
s16 accelY;
s16 accelZ;
}ACCELSTRUCT;
typedef struct GYROSTRUCT
{
s16 gyroX;
s16 gyroY;
s16 gyroZ;
}GYROSTRUCT;
extern struct ACCELSTRUCT accelStruct ;
extern struct GYROSTRUCT gyroStruct ;
u8 MpuInit(void);
void MpuGetData(void);
#endif
2. Mpu6050.c
#include "mpu6050.h"
struct ACCELSTRUCT accelStruct = {0,0,0};
struct GYROSTRUCT gyroStruct = {0,0,0};
//IO方向设置
#define MPU_SDA_IN() {GPIOC->CRH&=0XFFFF0FFF;GPIOC->CRH|=8<<12;}
#define MPU_SDA_OUT() {GPIOC->CRH&=0XFFFF0FFF;GPIOC->CRH|=3<<12;}
//IO操作函数
#define MPU_SCL PCout(10) //MPU SCL
#define MPU_SDA PCout(11) //MPU SDA
#define MPU_READ_SDA PCin(11) //输入SDA
/**************************MPU5883 IIC驱动函数*********************************/
static void MPU5883IOInit(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOC, ENABLE );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10|GPIO_Pin_11;//PC10 PC11
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
MPU_SCL = 1;//初始化均为浮空状态
MPU_SDA = 1;
}
//发送IIC起始信号
static void ComStart(void)
{
MPU_SDA_OUT(); //sda线输出
MPU_SDA=1;
MPU_SCL=1;
DelayUs(5);
MPU_SDA=0;//START:when CLK is high,DATA change form high to low
DelayUs(5);
MPU_SCL=0;//钳住I2C总线,准备发送或接收数据
}
//发送IIC停止信号
static void ComStop(void)
{
MPU_SDA_OUT();//sda线输出
MPU_SDA=0;//STOP:when CLK is high DATA change form low to high
MPU_SCL=1;
DelayUs(5);
MPU_SDA=1;//发送I2C总线结束信号
DelayUs(5);
}
//等待ACK,为1代表无ACK 为0代表等到了ACK
static u8 ComWaitAck(void)
{
u8 waitTime = 0;
MPU_SDA_OUT();//sda线输出
MPU_SDA = 1;
DelayUs(5);
MPU_SDA_IN(); //SDA设置为输入
MPU_SCL=1;
DelayUs(5);
while(MPU_READ_SDA)
{
waitTime++;
DelayUs(1);
if(waitTime > MPU_ACK_WAIT_TIME)
{
ComStop();
return 1;
}
}
MPU_SCL = 0;
return 0;
}
//static void ComSendAck(void)
//{
// MPU_SCL = 0;
// MPU_SDA_OUT();
// MPU_SDA = 0;
// DelayUs(2);
// MPU_SCL = 1;
// DelayUs(5);
// MPU_SCL = 0;
// DelayUs(5);
//}
static void ComSendNoAck(void)
{
MPU_SCL = 0;
MPU_SDA_OUT();
MPU_SDA = 1;
DelayUs(2);
MPU_SCL = 1;
DelayUs(5);
MPU_SCL = 0;
DelayUs(5);
}
//返回0 写入收到ACK 返回1写入未收到ACK
static u8 ComSendByte(u8 byte)
{
u8 t;
MPU_SDA_OUT();
for(t=0;t<8;t++)
{
MPU_SDA=(byte&0x80)>>7;
byte<<=1;
MPU_SCL=1;
DelayUs(5);
MPU_SCL=0;
DelayUs(5);
}
return ComWaitAck();
}
static void ComReadByte(u8* byte)
{
u8 i,receive=0;
MPU_SDA_IN();//SDA设置为输入
for(i=0;i<8;i++ )
{
receive <<= 1;
MPU_SCL=1;
DelayUs(5);
if(MPU_READ_SDA)receive++;
MPU_SCL=0;
DelayUs(5);
}
*byte = receive;
}
/**************************MPU5883 IIC驱动函数*********************************/
//向MPU写入一个字节数据,失败返回1 成功返回0
u8 MPUWriteReg(u8 regValue,u8 setValue)
{
u8 res;
ComStart(); //起始信号
res = ComSendByte(MPU_ADDR); //发送设备地址+写信号
if(res)
{
#ifdef MPU_DEBUG
printf("file=%s,func=%s,line=%drn",__FILE__,__FUNCTION__,__LINE__);
#endif
return res;
}
res = ComSendByte(regValue); //内部寄存器地址
if(res)
{
#ifdef MPU_DEBUG
printf("file=%s,func=%s,line=%drn",__FILE__,__FUNCTION__,__LINE__);
#endif
return res;
}
res = ComSendByte(setValue); //内部寄存器数据
if(res)
{
#ifdef MPU_DEBUG
printf("file=%s,func=%s,line=%drn",__FILE__,__FUNCTION__,__LINE__);
#endif
return res;
}
ComStop(); //发送停止信号
return res;
}
//**************************************
//从I2C设备读取一个字节数据 返回值 读取成功或失败
//**************************************
u8 MPUReadReg(u8 regAddr,u8* readValue)
{
u8 res;
ComStart(); //起始信号
res = ComSendByte(MPU_ADDR); //发送设备地址+写信号
if(res)
{
#ifdef MPU_DEBUG
printf("file=%s,func=%s,line=%drn",__FILE__,__FUNCTION__,__LINE__);
#endif
return res;
}
res = ComSendByte(regAddr); //发送存储单元地址,从0开始
if(res)
{
#ifdef MPU_DEBUG
printf("file=%s,func=%s,line=%drn",__FILE__,__FUNCTION__,__LINE__);
#endif
return res;
}
ComStart(); //起始信号
res = ComSendByte(MPU_ADDR+1); //发送设备地址+读信号
if(res)
{
#ifdef MPU_DEBUG
printf("file=%s,func=%s,line=%drn",__FILE__,__FUNCTION__,__LINE__);
#endif
return res;
}
ComReadByte(readValue); //读出寄存器数据
ComSendNoAck(); //发送非应答信号
ComStop(); //停止信号
return res;
}
//MPU读取两个字节的数据
s16 MpuReadTwoByte(u8 addr)
{
u8 H,L;
MPUReadReg(addr,&H);
MPUReadReg(addr+1,&L);
return (s16)((((u16)H)<<8)+L); //合成数据
}
/*
*初始化,返回0代表失败 返回1代表成功
**/
u8 MpuInit(void)
{
u8 result;
u8 id = 0;
MPU5883IOInit();
result = MPUReadReg(MPU6050_RA_WHO_AM_I,&id);
if(result) return result; //IIC总线错误
else
{
id &= 0x7e;//除去最高位最低位
id>>= 1;
if(id != 0x34) return 1; //获取到的芯片ID错误
}
//初始化成功,设置参数
MPUWriteReg(MPU6050_RA_PWR_MGMT_1,0x01); // 退出睡眠模式,设取样时钟为陀螺X轴。
MPUWriteReg(MPU6050_RA_SMPLRT_DIV,0x04); // 取样时钟4分频,1k/4,取样率为25Hz。
MPUWriteReg(MPU6050_RA_CONFIG,2); // 低通滤波,截止频率100Hz左右。
MPUWriteReg(MPU6050_RA_GYRO_CONFIG,3<<3); // 陀螺量程,2000dps
MPUWriteReg(MPU6050_RA_ACCEL_CONFIG,2<<3); // 加速度计量程,8g。
MPUWriteReg(MPU6050_RA_INT_PIN_CFG,0x32); // 中断信号为高电平,推挽输出,直到有读取操作才消失,直通辅助I2C。
MPUWriteReg(MPU6050_RA_INT_ENABLE,0x01); // 使用“数据准备好”中断。
MPUWriteReg(MPU6050_RA_USER_CTRL,0x00); // 不使用辅助I2C。
return 0;
}
//获取相应的测量数据
void MpuGetData(void)
{
s16 temp = 0;
accelStruct.accelX = MpuReadTwoByte(MPU6050_RA_ACCEL_XOUT_H);
accelStruct.accelY = MpuReadTwoByte(MPU6050_RA_ACCEL_YOUT_H);
accelStruct.accelZ = MpuReadTwoByte(MPU6050_RA_ACCEL_ZOUT_H);
gyroStruct.gyroX = MpuReadTwoByte(MPU6050_RA_GYRO_XOUT_H);
gyroStruct.gyroY = MpuReadTwoByte(MPU6050_RA_GYRO_YOUT_H);
gyroStruct.gyroZ = MpuReadTwoByte(MPU6050_RA_GYRO_ZOUT_H);
temp = MpuReadTwoByte(MPU6050_RA_TEMP_OUT_H);
#ifdef MPU_DEBUG
printf("accel x = %d ,y = %d ,z = %d rn",accelStruct.accelX,accelStruct.accelY,accelStruct.accelZ);
printf("gyro x = %d ,y = %d ,z = %d rn",gyroStruct.gyroX,gyroStruct.gyroY,gyroStruct.gyroZ);
printf("temp is %0.3f rn",(((float)temp)/340.0 + 36.53));
#endif
}
单片机-嵌入式毕设选题大全及项目分享:
https://blog.csdn.net/m0_71572576/article/details/125409052
7 最后
最后
以上就是秀丽美女最近收集整理的关于【毕业设计】基于STM32 的电子计步器的设计与实现 - 物联网 单片机 嵌入式1 简介2 项目介绍3 具体实现4 如何实现记步5 软件设计6 部分相关代码7 最后的全部内容,更多相关【毕业设计】基于STM32内容请搜索靠谱客的其他文章。
![从零开始搭建物联网系统[导读] 在一个平常的不能再平常的周末下午,几个小伙伴聚在了一起,一起畅想“万物互联”的物联网未来。小伙伴中有硬件开发者、嵌入式开发者、软件开发者;有互联网公司的全栈工程师、也有核电厂的工控系统维护者、还有路由器厂商的wifi协议开发者。我们发现,世面上没有开源且可商用的物联网平台或系统。这里的可商用,不是搭建几个demo把硬件连上网、app操作两下这么简单!关键词:物联网](https://www.shuijiaxian.com/files_image/reation/bcimg13.png)







发表评论 取消回复