1、转速与角速度换算关系
转速的国际符号是 n,r/s表示转速n的单位,其中r表示转的单位,也就是圆周运动的圈数。
角速度的国际符号是W, rad/s表示角速度w的单位,其中rad是角度的单位,称为弧度,一个圆周为2pi弧度。
即:1r = 2pi*rad。r/s = 2pi * rad/s。 所以: w = 2pi * n 。
1RPM = 1 r/min = 1 r/60s = (2pi / 60) * rad/s 。
所以转速,角速度的转换关系是
w = 2pi / 60* 1RPM; RPM = 60/2pi * w。
2、电机功率和转速的关系:
P=T×n/9550 =w.T(w机械电气角度)
其中P是额定功率(KW) 、n是额定转速( 转/分 = RPM) 、T是额定转矩(N.m)
P =w.T(w机械电气角度)
其中P是额定功率(W) 、ww机械电气角度(rad/s) 、T是额定转矩(N.m)
3、控制器效率, 电机效率,系统效率的关系
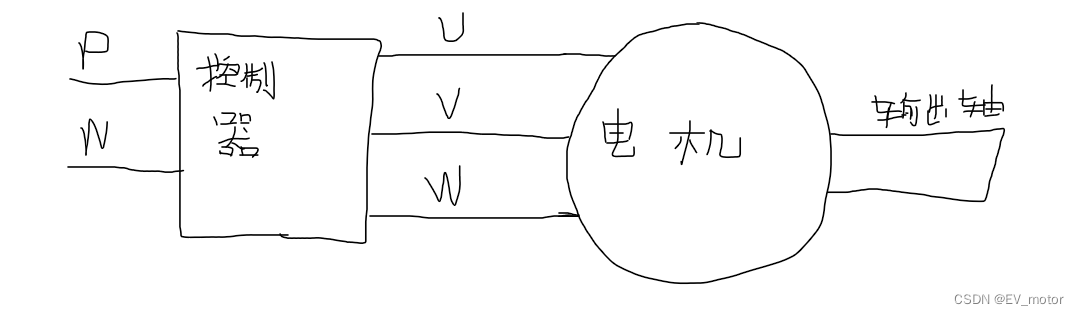
电机控制驱动模式下:
K =控制器效率 = 三相功率/直流功率; M =电机效率 = 机械功率/三相功率; S =系统效率 = 机械功率/直流功率。
系统效率 = 控制器效率 * 电机效率; S = K * M
电机控制发电模式下:
1/K = 控制器效率1 = 直流功率/三相功率; 1/M =电机效率1 = 三相功率/机械功率; 1/S =系统效率1= 直流功率/机械功率。
系统效率1 = 控制器效率1 * 电机效率1;1/S = 1/K * 1/M
最后
以上就是友好楼房最近收集整理的关于电机控制用到的公式换算总结的全部内容,更多相关电机控制用到内容请搜索靠谱客的其他文章。



![[技术讨论]H桥驱动直流电机的效率计算方法](https://www.shuijiaxian.com/files_image/reation/bcimg8.png)




发表评论 取消回复