相机标定的目的:确定空间物体的三维几何位置和其在图像对应点的相互关系,建立摄像机成像模型,几何参数称为摄像机的内参。
一、工具箱下载http://www.vision.caltech.edu/bouguetj/calib_doc/index.html,解压到的路径添加到matlab搜索路径下。
二、下载标定板图片http://www.vision.caltech.edu/bouguetj/calib_doc/htmls/example.html
三、单目标定流程
1、matlab命令行窗口输入:calib,出现下面界面:
2、选择Standard出现下面界面:

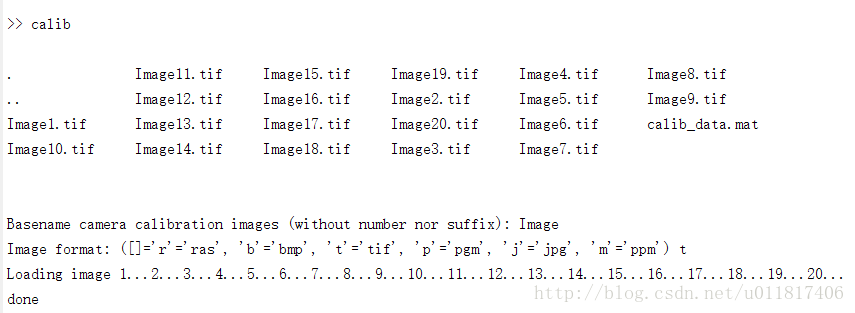
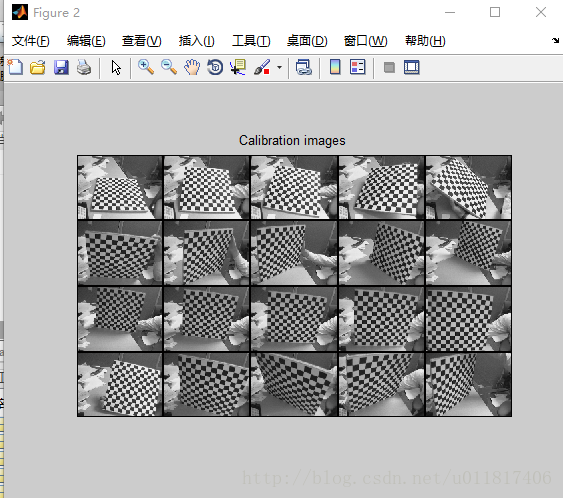
3、选择Image names(选择你图片所在的文件夹),根据文件名和格式输入 Image 和 t,显示文件夹下的20幅tif格式图片
4、选择Extract grid corners,回车默认参数,主要是让你输入棋盘角点搜索窗口的大小。窗口定的大一点的话提取角点会比较方便点(即便点得偏离了也能找到),但也要注意不能大过一个方格的大小。如下图:
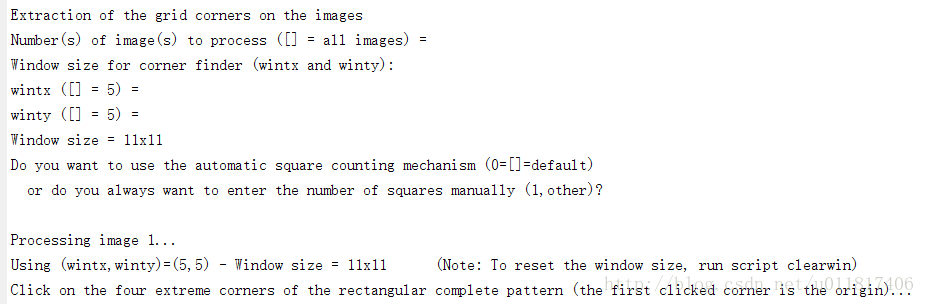
从左上角顺时针选取四个点,如下图,直到所有图点选取结束;如果
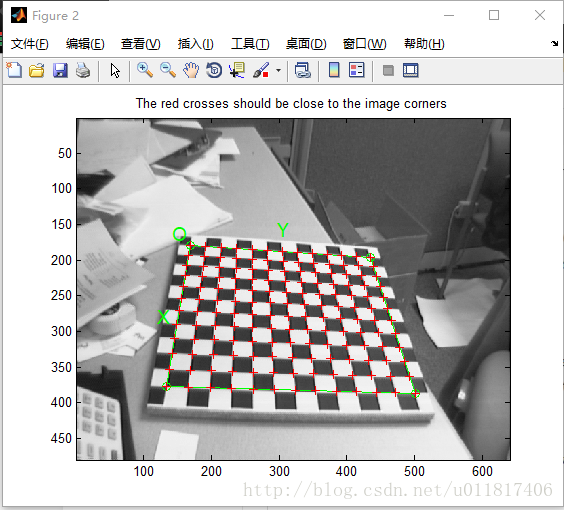
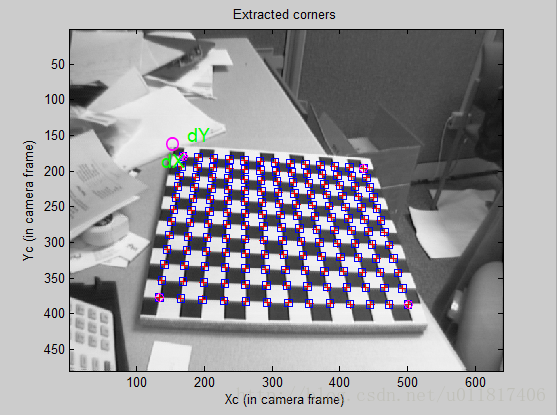
如果图片所选取的角点不在图片的的焦点上,
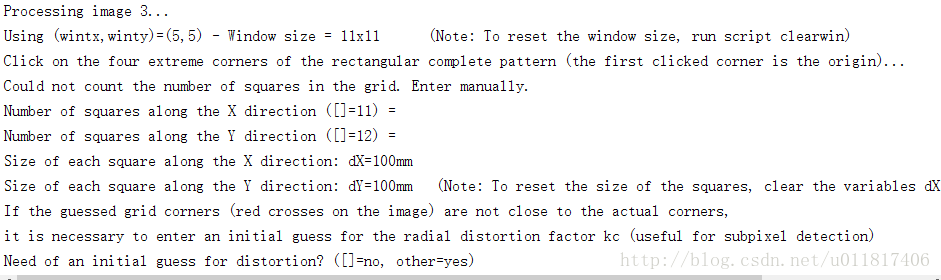
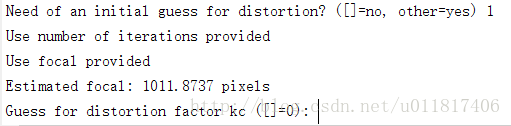
如下图操作,如果预测的角点与实际偏差很大,原因是图像失真。所以,手动输入校正系数kc,遇到:Need of an initial guess for distortion? 然后,输入校正系数kc=-0.3(系数在-1到1之间)。
再根据提示选择从第几幅图提取角点。
5、选择Calibration,进行标定,如下图所示:
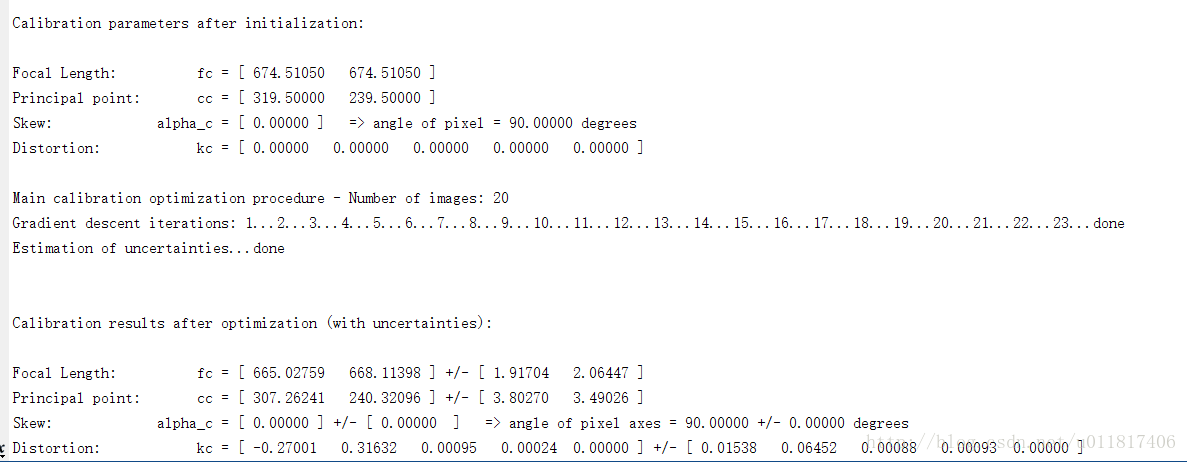
fc离得参数表示表示x,y方向上的焦距,cc表示图像光心坐标,kc为畸变参数:径向,切向
以上只是本人实验过程中粗略的记了下笔记,具体参考下面的文章。
http://blog.csdn.net/jkhere/article/details/8784865
四、双目标定
命令行输入stereo_gui,显示界面如下
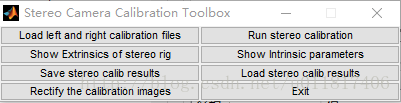
选择load left and right calibration files并在命令行输入默认的标定文件名称 ,run,就能得到右相机相对于左相机的旋转矩阵R和平移矩阵T了。
如下图所示:
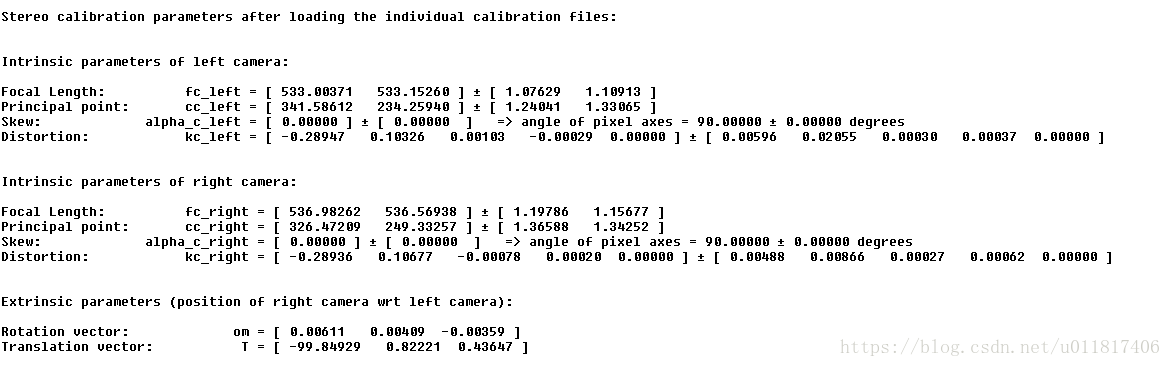
其中on为旋转矩阵,T为平移矩阵,
最后
以上就是迷人往事最近收集整理的关于MATLAB标定工具箱----单目标定(学习笔记)的全部内容,更多相关MATLAB标定工具箱----单目标定(学习笔记)内容请搜索靠谱客的其他文章。








发表评论 取消回复