控制分析
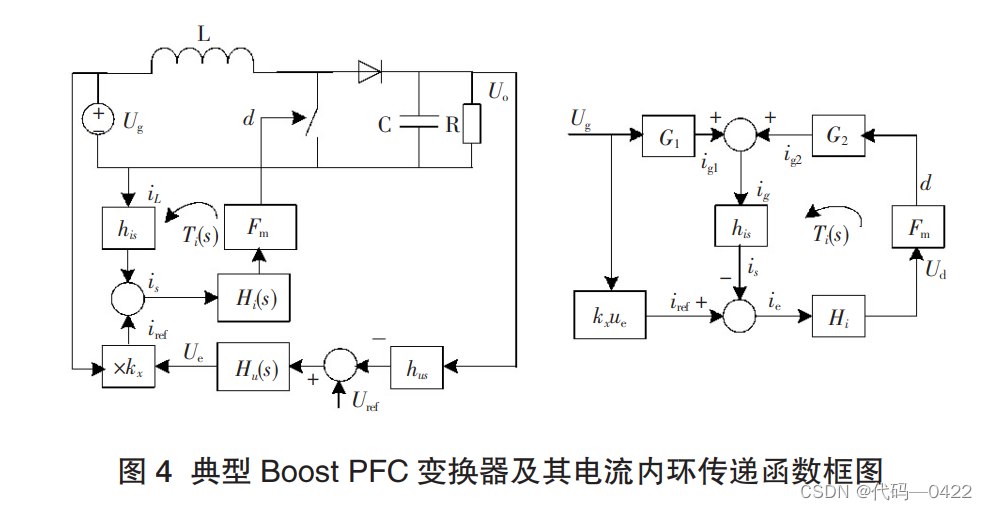
根据电路结构,控制分为 PFC 的双环控制和输出电压环控制,其中较重要的是 PFC 的双环控制。由以上分析可知,PFC 占空比变化将对输出电压环控制产生影响,因此对 PFC 的控制提出了更高的要求。图 4 为一个典型双环Boost PFC 变换器及其电流内环传递函数框图。实际应用中,直 流 输 出 侧 滤 波 电 容 较 大, 输 出 电 压 U o 可 视 为常数。
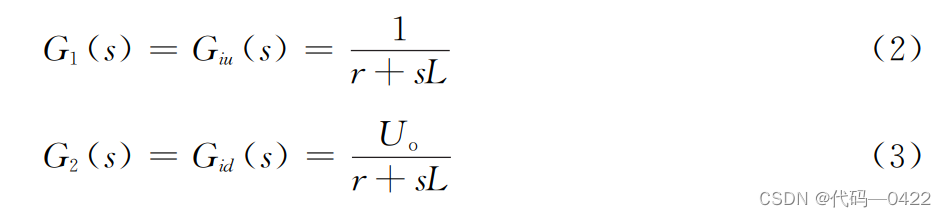
由状态空间模型可得功率电路传递函数为:
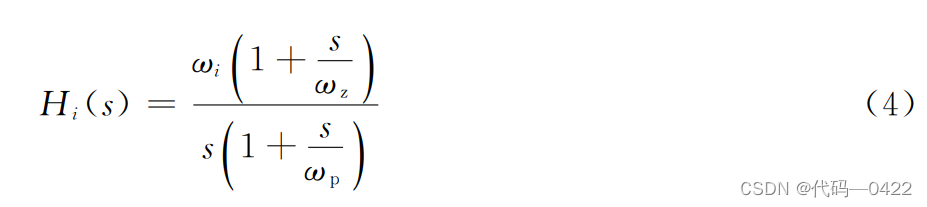
因为电流环低频增益高,所以可忽略输入电流通路等效电阻 r 对整个闭环传递函数的影响。电流环 PI 调节器的传递函数为:
推导可得输入电流:

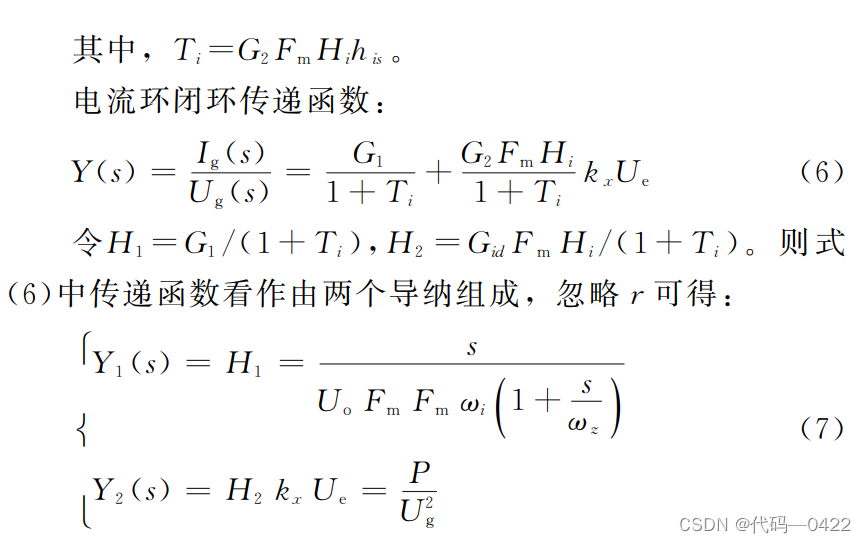
Y 2 (s)是期望的输入导纳幅值,当开关频率低于截止频率时,导纳角为零,该导纳上电流与输入电压同相位。而此时, Y 1 (s)导纳角为 9 0°,该支路电流相位滞后输入电压相位。
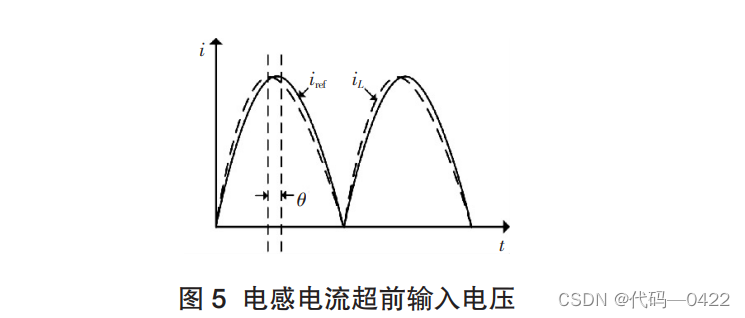
由此可知,传统的 PI 控制会使整个 PFC 系统导纳角不再为零,造成实际电感电流超前输入电压一定角度,使得电感电流畸变,电流谐波失真大,如图 5 所示。同时,在电流滤波、信号采样等环节造成的延时也会使 PI 控制的电流跟踪效果差。
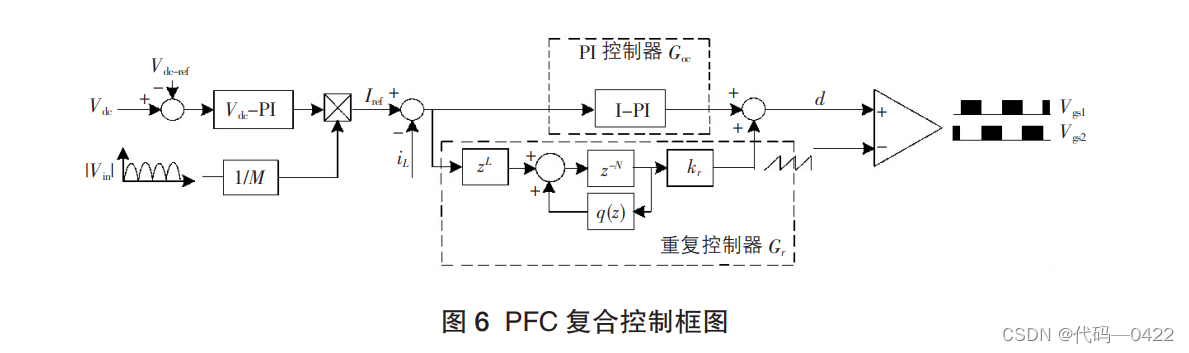
为此,提出一种带超前相 位 环 节 的 重 复 控 制 算法,以抑制 PI 控制造成的相位超前。重复控制是一种基于内模原理的控制策略,通过在反馈控制环路里加入一个描述外部输入信号动态特性的数学模型,实现良好的跟踪及抵消扰动。它的具体作用是以误差表的形式记忆一个基波周期长度(即 N 个采样点)的误差信息,并且每经历一个基波周期,就把新近记录下的 N 个新误差信息逐点累加到原误差表对应单元中去。其表现为只要误差不为零,误差表内容就不会停止增长。将重复控制与 PI 控制相结合构成的复合控制算法,可利用重复控制有效消除电流周期性的扰动和误差,确保系统 有 较 快 的 动 态 响 应。 PFC 复 合 控 制 框 图 如 图 6所示。
假定 P (z ) 是被控对象,利用控制原理中的小增益原理,可推导重复控制器系统稳定的充分条件为:
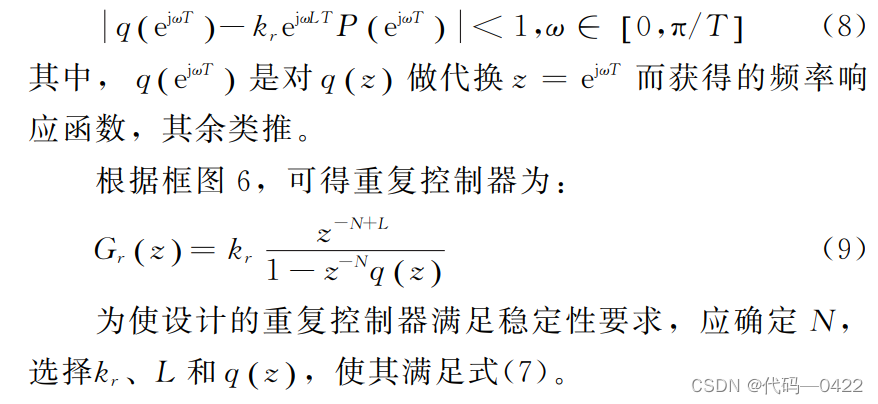
(1)重复控制增益 kr 设定为正数,控制补偿量强度。kr 增大,系统误差收敛速度变快,但系统稳定性变差。反之, kr 减小,稳态误差有所增大,但系统稳定性增。在该电路情况下, kr =1.5。
(2)N 为开关点数, z-N 为周期延时环节。电感电流频率为 1 00 Hz,采样频率为 40kHz,故 N =400。
(3)超前环节 z
L 作为相位补偿环节,补偿闭环系统和滤波器引入的相位滞后,L 为相位超前点数。为补偿电流环 PI 控制器造成的电流相位超前电压,选取 L=3 即可满足设计要求。
(4)q (z ) 是重复控制器非常重要的部分,增强前向通道的高频衰减特性, 提高系统的稳定性和抗高频干扰能力。 q (z ) 为一阶滤波器,相比常数有更好的衰减特性,选取 q (z ) = (z + 2 +z-1 )/4。
全桥输出电压环控制较简单,考虑到 Q3 和 Q4 驱动的要求,PI 计算出的占空比还需与 Q2 PWM 占空比 D、Q1的 PWM 占空比 1-D 进行比较,取其中较小值作为最后的占空比值。
最后
以上就是忧心硬币最近收集整理的关于GaN图腾柱无桥 Boost PFC(单相)八-理论算法——重复控制的全部内容,更多相关GaN图腾柱无桥内容请搜索靠谱客的其他文章。








发表评论 取消回复