自动驾驶仿真三—— 基于PreScan与Simulink的AEB系统仿真
博主前面的博文已经介绍了Prescan&Simulink基本的场景建模及仿真分析流程,《自动驾驶仿真 (二)—— 基于PreScan与Simulink的联合仿真》。Prescan是基于物理学的模拟,用于汽车行业开发基于雷达、摄像头和 GPS 等传感器技术的无人驾驶车辆。PreScan与Simulink 联合仿真的工作流程是:
(1)建立仿真环境、行驶路径、车辆以及其行驶参数等 (在 Pre Scan 中完成)。
(2)为车辆添加毫米波雷达、激光雷达或鱼眼相机等传感器,并调节传感器的感知范围(在 Pre Scan 中完成)。
(3)建立主车的控制算法,依据传感器检测到的信息对主车实施相应的控制;目标车辆则只需在 Pre Scan 中设置运动参数即可(主车控制算法在 MATLAB/ Simulink 中完成)。
(4)实验仿真(在 Pre Scan 与 Simulink 中查看仿真结果)。Pre Scan 与 Simulink 在开发过程中也遵循“V”型开发流程,包括概念、设计、执行、验证和确认五个阶段。
所以Prescan可从基于模型的控制器设计(MIL)到利用软件在环(SIL)和硬件在环(HIL)系统进行的实时测试。前面博文的例子中并未添加复杂的控制系统模型,博文当中也已经提到了碰上这类极有可能发生碰撞时配置有AEB功能的必要性,并且C-NCAP中也有AEB相关的测试项目要求。所以本博文就在之前的模型基础上,添加AEB控制系统模型,以C-NCAP中AEB的部分测试项目来建模相应的测试场景做仿真分析。
1. AEB自动紧急制动系统
自动紧急制动系统(autonomous emergency braking system,AEB)已经成为车辆主动安全技术中不可或缺的一部分。在车辆行驶过程中,AEB 通过毫米波雷达、摄像头、激光雷达等感知前方道路环境,当AEB 系统检测到前方存在碰撞危险时,首先对驾驶员提出预警,提醒驾驶员采取避撞措施。若驾驶员没有采取相应措施,在碰撞即将发生时,系统将对车辆自动制动来避免事故的发生或者减轻事故发生的程度。因此 AEB 系统的可靠性直接关系到驾乘人员的生命安全。
AEB 系统一般分成预警和制动两大阶段。预警阶段又分成图像预警和图像声音联合预警两大阶段,制动阶段分成部分制动和完全制动两大阶段。因此一般情况下,AEB 系统主要分成4个阶段。
阶段 1:AEB 系统检测到前方存在碰撞危险,但是危险程度较低,系统采取在仪表盘或者中控台发出提示性图像预警提醒驾驶员存在的危险。
阶段 2:危险等级上升到较高的水平,此时,系统采取声音和图像双重预警提醒驾驶员碰撞即将发生。
阶段 3:碰撞的危险很高,系统在阶段2 的基础上对车辆采取部分制动以降低车速。
阶段4:危险等级极高,碰撞即将发生甚至无法避免,此时,AEB 系统采用完全制动以避免事故的发生或降低事故对驾乘人员的伤害程度。。
1. 1 TTC碰撞时间模型
目前,针对AEB系统,国内外学者提出的模型算法主要包括:碰撞时间TTC(time to collision)模型、安全距离模型、避免碰撞最小减速度模型、驾驶员主观判断模型等。其中,碰撞时间模型公式简单,应用广泛,在目前的主流AEB产品中应用较多。因此,本博文选取碰撞时间模型来进行仿真分析。
碰撞时间指的是相同路径上两车维持自身车速同向行驶,直至发生碰撞所需要的时间,其计算公式如下:
TTC=Dr/Vr
式中:Dr为两车相对距离,m;Vr为两车相对速度,m/s。
碰撞时间模型是在 TTC<T1 时,在驾驶员未对碰撞预警作出响应的情况下,自动紧急制动系统会替代驾驶员采取措施进行紧急制动操作。
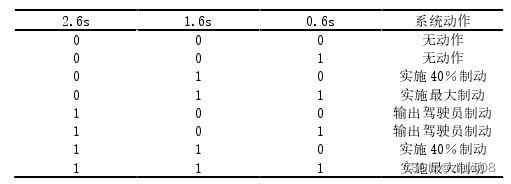
通过上式可知,即碰时间模型公式简单明了,行车过程中只需要输入两车的相对车速和相对距离等少量的参数,即可计算出碰撞时间阈值。在传统的基于碰撞时间的安全距离模型中,自动紧急制动系统发出预警时的时间阈值为Tb3=2.6s,车辆进行部分制动时的时间阈值为Tb2=1.6s,车辆进行完全制动的时间阈值为Tb1=0.6s,具体控制逻辑如下表所示:
1. 2 C-NCAP法规部分术语与定义
本次仿真分析主要参考的C-NCAP法规:
《C-NCAP管理规则(2021 年版)》
《C-NCAP管理规则(2021 年版)附录C 主动安全ADAS 系统试验方法》
以下给出部分术语与定义:
VUT(Vehicle Under Test):试验车辆。装有相关 ADAS 功能系统并将依照本试验规程进行测试的车辆。
GVT(Global Vehicle Target):目标车辆。本测试规程中所指定使用的目标车辆。
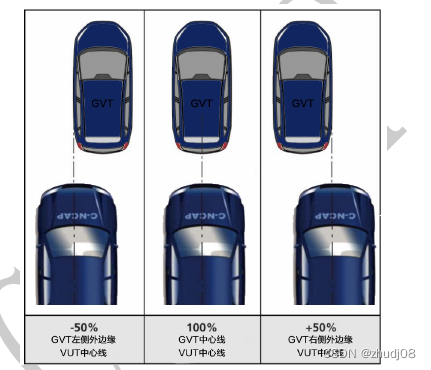
偏置率定义为 VUT 与 GVT 重叠部分占 VUT 的百分比,重叠定义的参考线是 VUT 的中心线,在 100%重叠的情况下,VUT 和 GVT 的中心线对齐,如下图所示。
试验路面要求压实并且无可能造成传感器异常工作的不规则物(如大的倾角、裂缝、井盖或是具有反射能力的螺栓等)。车道中心线到道路两侧的宽度不小于 3.0m,。试验结束点的前方有至少 30m 的预留道路。
1. 3 主动安全ADAS系统试验项目
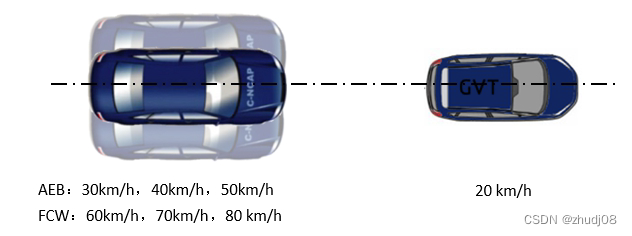
在法规的主动安全部分,便是对先进驾驶辅助系统(ADAS)的车辆自动紧急制动系统(AEB)的性能测试展开论述,AEB 系统在车辆发生紧急情况时会自动制动以避免或减轻碰撞伤害,对于配置了AEB 系统的车型,进行AEB CCR、AEB VRU_Ped 以及AEB VRU_TW 测试。AEB CCR、AEB VRU_Ped及AEB VRU_TW 试验分别用被测车辆以不同速度行驶至前方的模拟车辆目标物、模拟行人目标物以及模拟二轮车目标物,检验被测车辆在没有人为干预的情况下的制动及预警情况,以评价AEB 系统的性能好坏。详见附录C 规定的试验方法。
本博文仅对车辆追尾自动紧急制动系统(AEB CCR)做示例仿真分析记录,也算供大家学习参考。
相较于2018版,2021版的C-NCAP有更新,有删除,有增加。在AEB 中,已将AEB CCRb删除,所以2021版AEB CCR 系统包含两种测试场景:CCRs、CCRm。
1)CCRs 前车静止测试场景

2): CCRm 前车慢行测试场景
2. AEB仿真分析建模
下面就以CCRs开始建模作为范例论述。
2.1 搭建场景
仿真测试场景设计
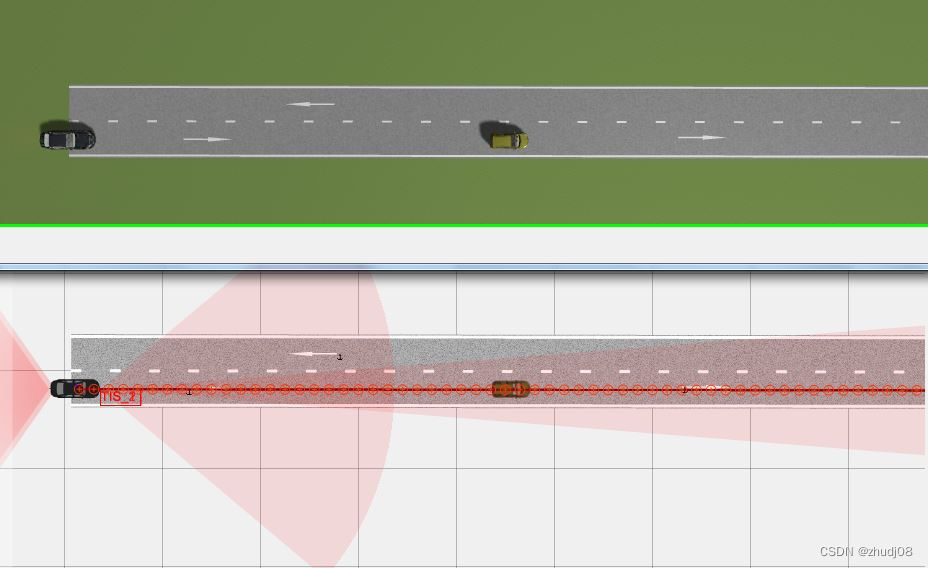
在Prescan中建立碰撞预警系统仿真测试场景,首先建立一条长100 m,双向2车道的直线道路,车道宽度为3.5 m。其次创建连续路径,添加车辆模型到所创建的路径上,该路径即成为自车车辆的行驶轨迹。在SpeedProfile编辑窗口设置车辆的初始位置,初始速度,加速度变化等,根据前车不同行驶状态设置每一段轨迹上的行驶状态参数。以上操作基本完成仿真测试场景的建立,测试场景三维视图如图所示。
车辆纵向动力学模型搭建
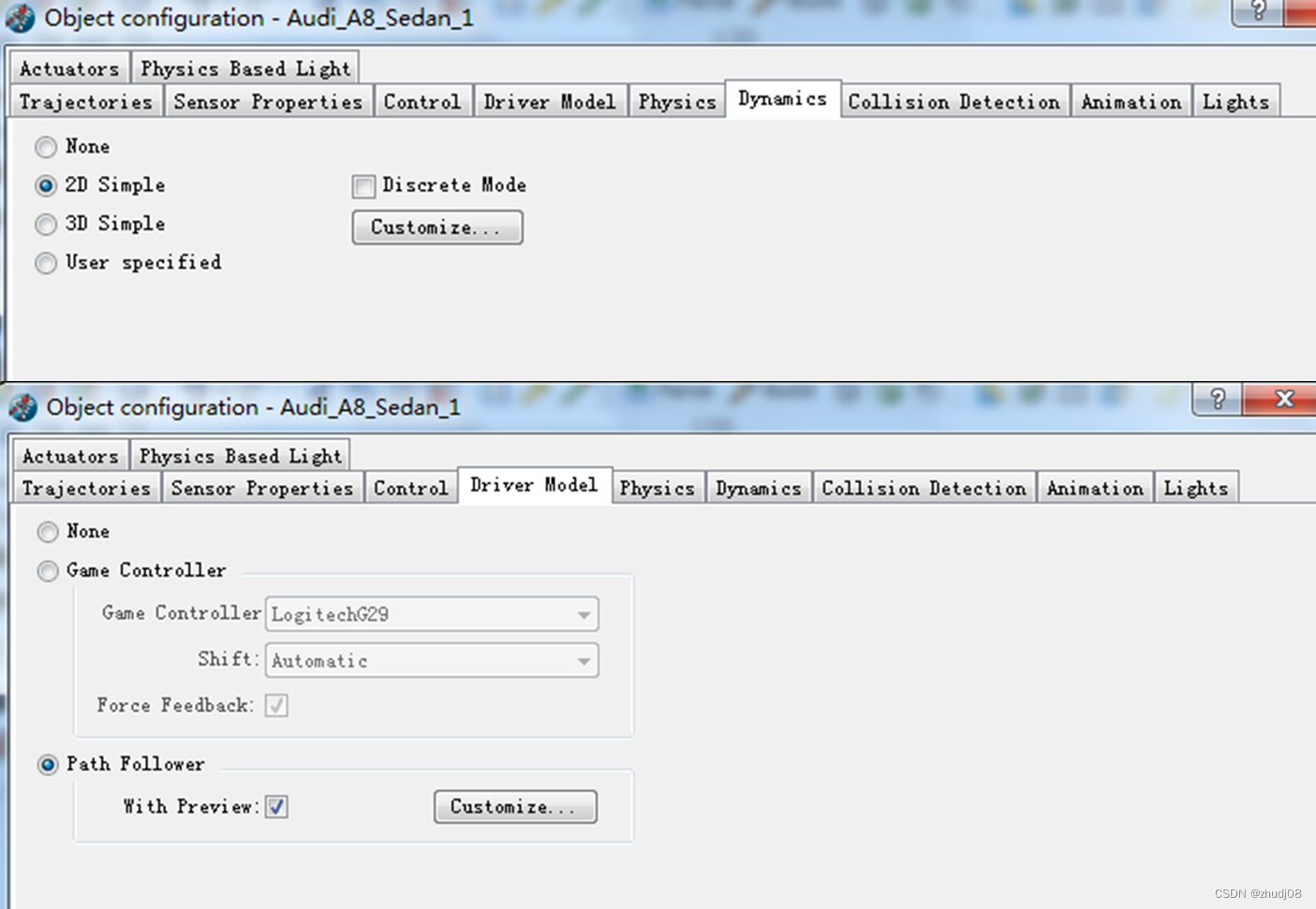
作为碰撞预警系统的控制对象,准确可靠的车辆纵向动力学模型是仿真研究的基础,为确保仿真结果的真实性,应当充分参考真实车辆的物理参数建模。本文车辆动力学模型选用Prescan软件自带的2D Simple模型,自车车型选用Audi_A8_Sedan_1,目标车辆选用Ford_Fiesta_Hatchback_1车型。在Prescan中,对车辆动力学参数设置如下:
2.2 传感器建模
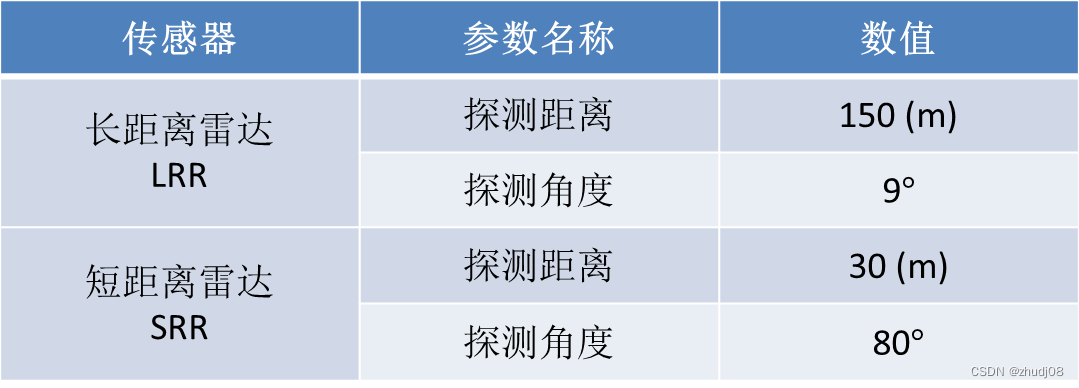
在 Prescan 软件中提供了许多车载传感器,传感器选择技术独立传感器(Technology independent sensor,TIS),因其可根据雷达、激光雷达等设备的通用操作原理来工作,不受特定技术的限制,并能够验证系统中任何一种主动传感器的性能。本次仿真建模中,根据毫米波雷达的特性选取 Prescan 软件中的 TIS 传感器作为车载传感器。分别设置两个毫米波雷达,长距离雷达(LRR)和短距离雷达(SRR)各一个,相关参数如下图所示:
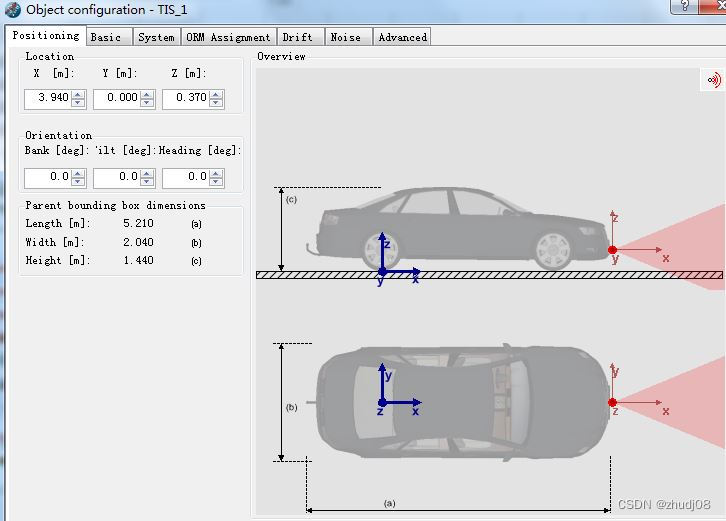
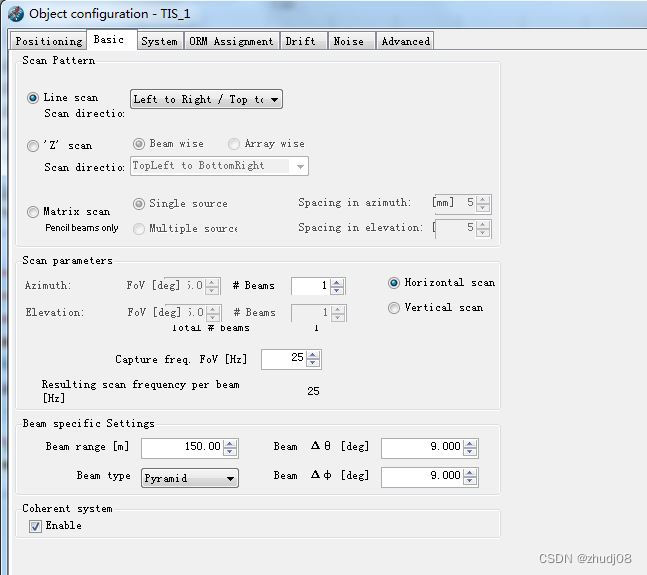
在实际操作中则单击“Sensor”图标里的“TIS”选项,将TIS传感器拖至车头位置,设置好其位置坐标。在“Basic”窗口中设置频率,检测范围、波的形式等参数。扫描方式设置为从左至右/从上到下,扫描光束设置为1条,最多探测物数量为32个,同时尾部左右两个制动灯打开。具体参数设置以LRR的TIS1示例如下图。
2.3 添加AEB控制系统
本仿真模型主要包括一下几个部分:车辆动力学模型、驾驶员模型、车载传感器模型和AEB自动紧急制动控制策略模型。
汽车自动紧急制动系统中的安全控制策略的作用是在车辆行驶过程中车载传感器不断收集车辆前方物体信息(前方车辆的速度、加速度、方位、距离等),根据所采集到的信息与安全模型中的信息进行比较后来判断车辆在行驶过程中的安全状态,最后根据不同的情况执行不同的安全策略,以便于车辆在行驶过程总能够避免碰撞事故的发生。制动控制策略的作用是当车辆遇到危险情况时,通过车辆安全控制策略计算出车辆进行制动的期望制动减速度的大小,然后将车辆期望的制动减速度转换乘车辆的制动强度,最后根据车辆需要的制动强度的大小来调节车辆的节气门开度和车辆的制动压力的大小。加入AEB控制算法以后得到下图所示的simulink控制逻辑图。
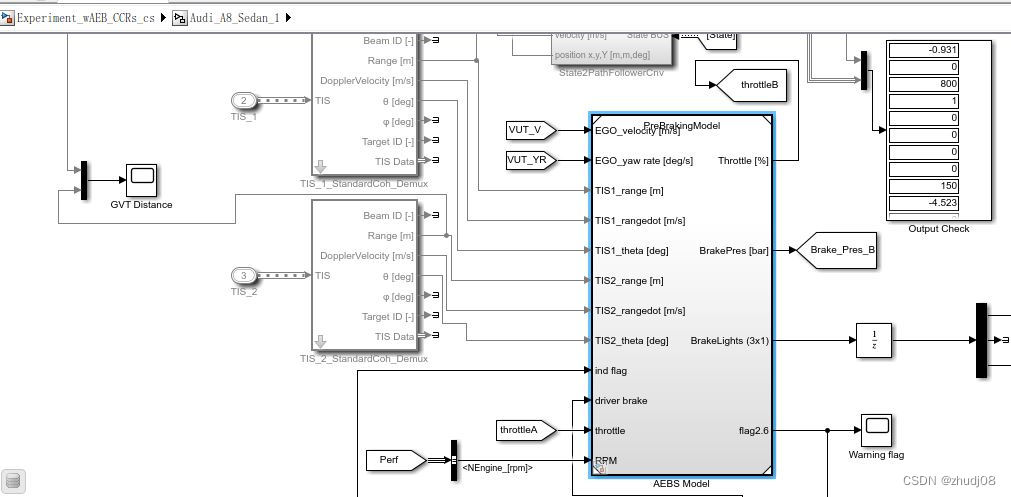
AEB算法模型将从LRR/SRR雷达获取三类信号:测试车与目标车的相对距离、相对车速和相对夹角。从PreScan车辆动力学模型及驾驶员模型获取以下信号:车辆速度、横摆角、节气门开度、发动机转速、制动标旗值和制动压力。经过AEB算法处理及逻辑决策后,输出信号则是:节气门开度、制动压力、制动灯信号及制动标旗值。
3. 典型工况仿真
本次博文只记录典型工况仿真分析结果,其他工况的设置均可参照下面的典型操作修改可得,这里就不做过多算例展开了。
3.1 CCRs仿真测试
在CCRs测试工况中,本次仿真一方面考虑节省计算时间,另一方面满足考察目标车从无到有进入SRR检测范围30m,所以就设定初始时刻试验车和目标车的距离为40m。下面就以测试车以40km/h接近前方40m处的目标车的CCRs 测试工况为例展开论述下仿真结果,仿真分析的动图如下:
从仿真动画中可以看出,该测试工况下测试车的自动紧急制动系统成功制动。下面给出LRR和SRR雷达探测的两车距离的变化曲线:
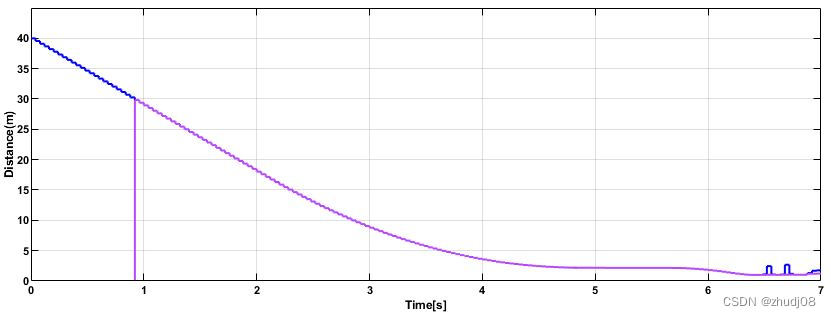
可以看出,40m本身就在LRR的探测距离内,所以一开始便被识别探测到。只有当目标车进入SRR的30m的探测范围时,才被SRR识别到。试验车在完全刹停前,LRR出现了较小的探测波动。由于SRR探测未出现波动,所以最终以SRR探测到的最终距离为准,该工况下的停车距离为1.205m。下面进一步给出测试车行驶过程中的速度及加速度曲线变化。
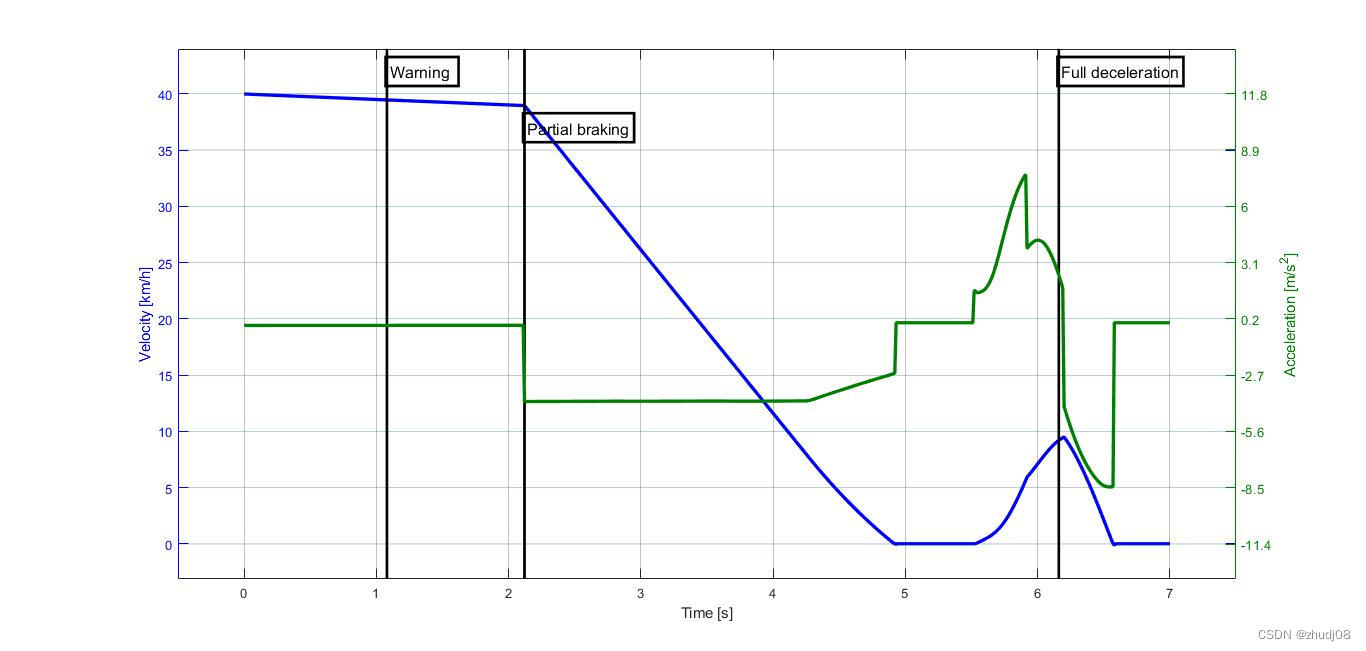
由上图可以看出,当测试车在实际行驶时前方出现障碍物,当碰撞时间Tb大于 Tb3 时,此种状态下测试车是安全的,可以认为测试车和前方障碍物没有碰撞危险;当碰撞时间Tb大于Tb2,并且小于 Tb3 时,车辆发出碰撞预警,提醒驾驶员与前方障碍物保持适当距离;当碰撞时间Tb大于 Tb1,并且小于 Tb2 时,自车进行部分制动,以此使测试车和前方障碍物保持适当距离,以避免与前方障碍物发生碰撞;当碰撞时间Tb小于 Tb2 时,测试车进行完全制动,以避免碰撞或减小碰撞时的车速,尽可能把事故损失降到最低。
3.1 CCRm仿真测试
对于前车以2020km/h匀速慢行情况下,之前的100m的道路不够跑几个回合,所以这次仿真计算将道路拉长到200m,同样考虑加快进入AEB作用域,节省计算时间,所以这次直接将试验车和目标车的初始距离拉近到15m。
主车以 40km/h 的速度接近前方 15m 处,以 20km/h匀速行驶的目标车,建模如下所示:
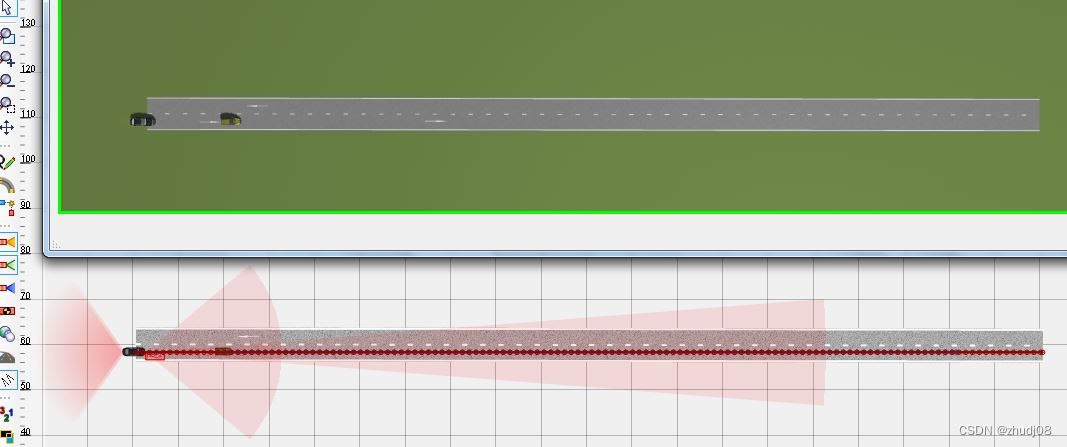
以下为仿真结果动画,本次实际仿真时间设置为20s,考虑到博客动画gif文件大小输出时常限制,这里仅是给出前面部分计算时间内的动画示意:
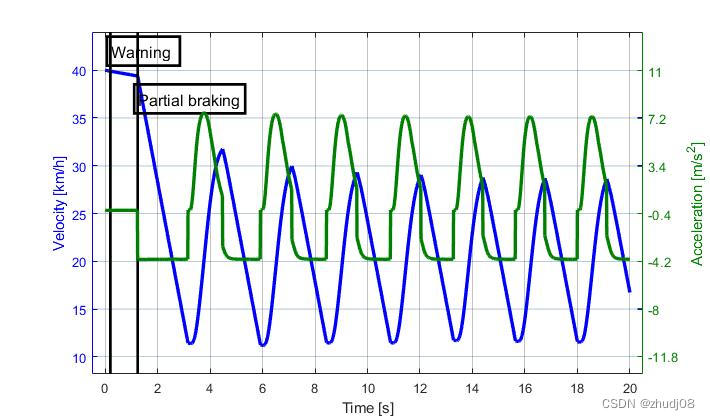
从试验车以40km/h的速度接近以20km/h匀速行驶的目标车辆时,从仿真结果可以看出,由于两车本来的初始距离15m较近,所以很快进入warning阶段,因为实际的基于碰撞时间的安全阈值小于设定的基于碰撞时间的安全阈值 ,因此试验车为与前方目标车辆保持适当安全距离进行部分制动减速,当试验车与前方目标车的基于碰撞时间阈值大于所设定的碰撞阈值时,试验车预警结束,解除部分制动,由于前方目标车以 20km/h的时速做匀速运动,所以试验车为与前方匀速目标车辆保持适当的安全距离会不断进行部分制动,因此就会出现如上图所示的试验车车速的变化情况。
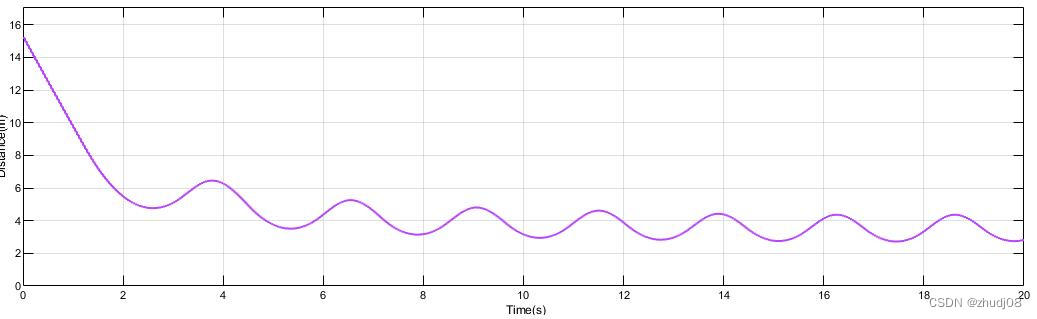
下面给出全仿真过程中辆车的相对距离变化关系:由于初始的距离即为15m,所以目标车一开始就已在LRR和SRR的检测范围内,同样可以看出试验车为与前方匀速目标车辆保持适当的安全距离会不断进行部分制动的循环情况。
4. 参考学习的书目教材
- PreScan Manual Documentation
- 《Matlab/Simulink系统仿真超级学习手册》 石良臣 编著
- 《C-NCAP管理规则(2021 年版)》
- 《C-NCAP管理规则(2021 年版)附录C 主动安全ADAS 系统试验方法》
- 《车辆AEB系统防撞预警控制及仿真测试方法研究》郭文博 2021硕士论文
- 《基于PreScan的无人驾驶车辆虚拟测试》付智超 2020硕士论文
- 《基于Prescan的智能驾驶辅助系统在环研究》 赵伊齐
=文档信息=
本学习笔记由博主原创整理编辑,仅供非商用学习交流使用
由于水平有限,错误和纰漏之处在所难免,欢迎大家交流指正
如本文涉及侵权,请随时留言博主,必妥善处置
版权声明:非商用自由转载-保持署名-注明出处
署名(BY) :zhudj
文章出处:https://zhudj.blog.csdn.net/
最后
以上就是生动河马最近收集整理的关于自动驾驶仿真 (三)—— 基于PreScan与Simulink的AEB系统仿真1. AEB自动紧急制动系统2. AEB仿真分析建模3. 典型工况仿真4. 参考学习的书目教材的全部内容,更多相关自动驾驶仿真内容请搜索靠谱客的其他文章。








发表评论 取消回复