环境
windows10+PreScan8.5.0+MATLAB2019b+vs2019社区版
场景搭建
- 双击打开【PreScan GUI 8.5.0】
- 【File】->【New Experiment】新建实验
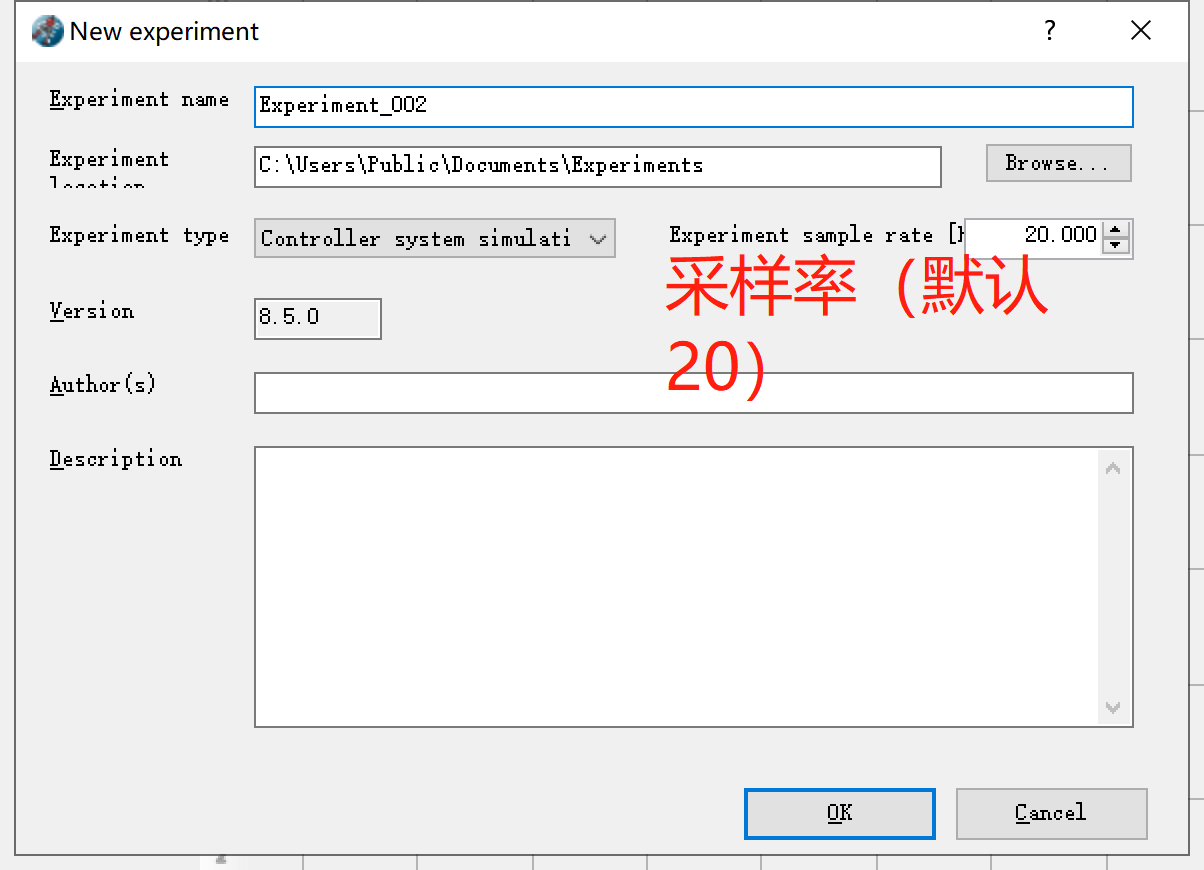
- 搭建环境(草地、水泥地、砖地等)
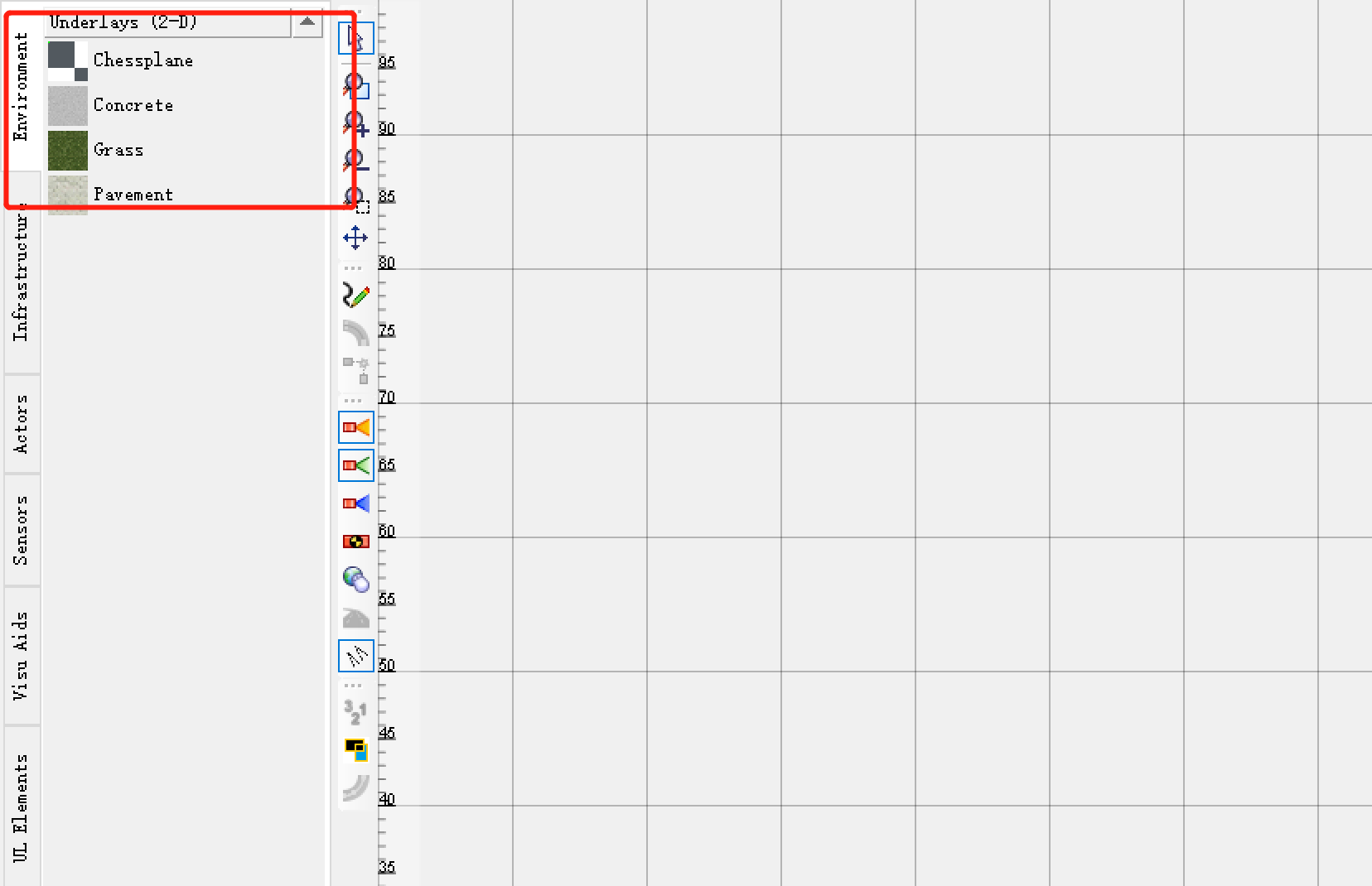
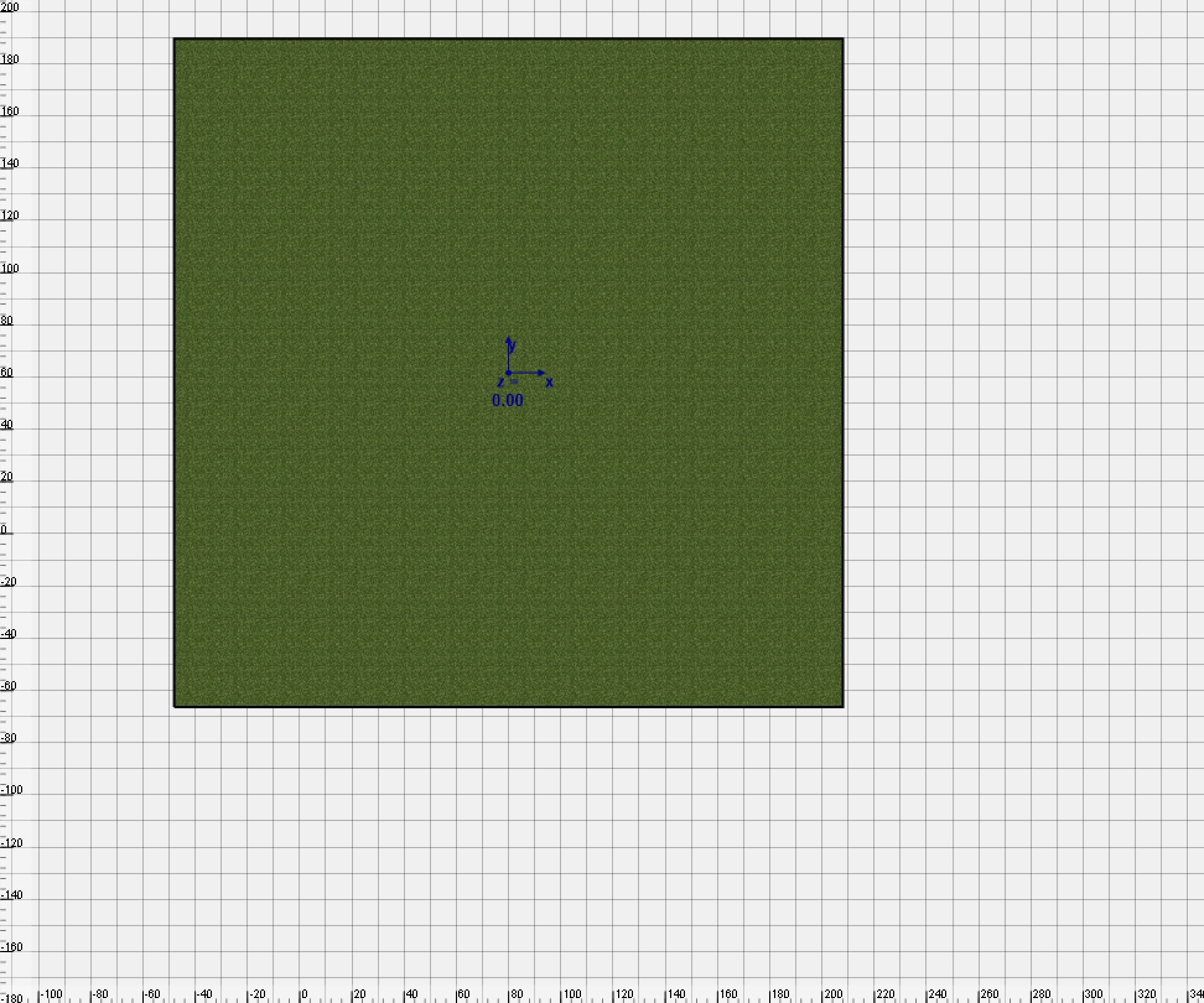
这里我选择草地场景,将【Grass】拖入网格区域
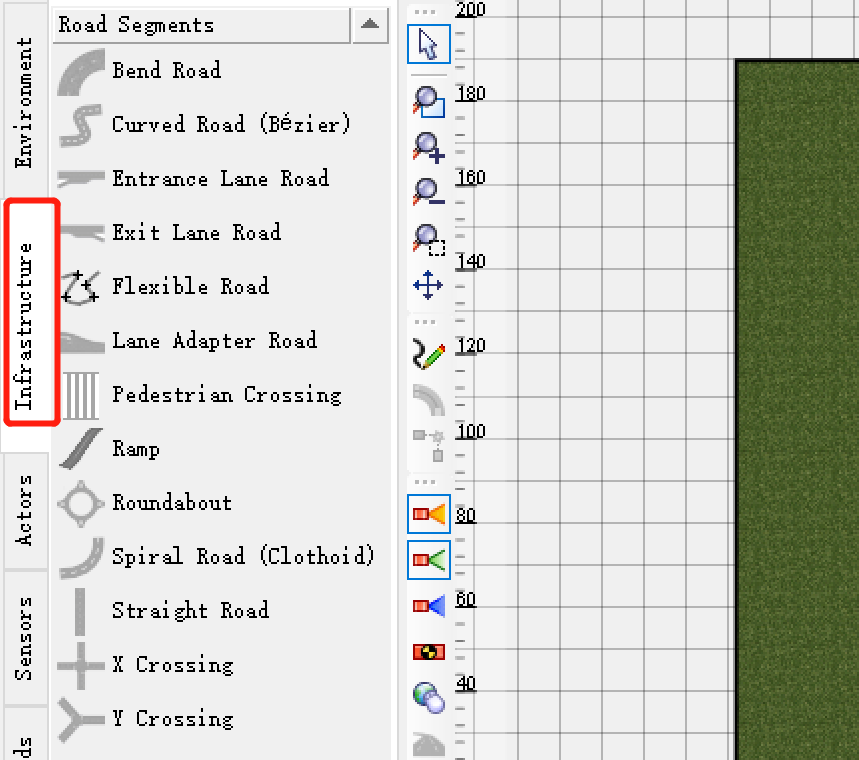
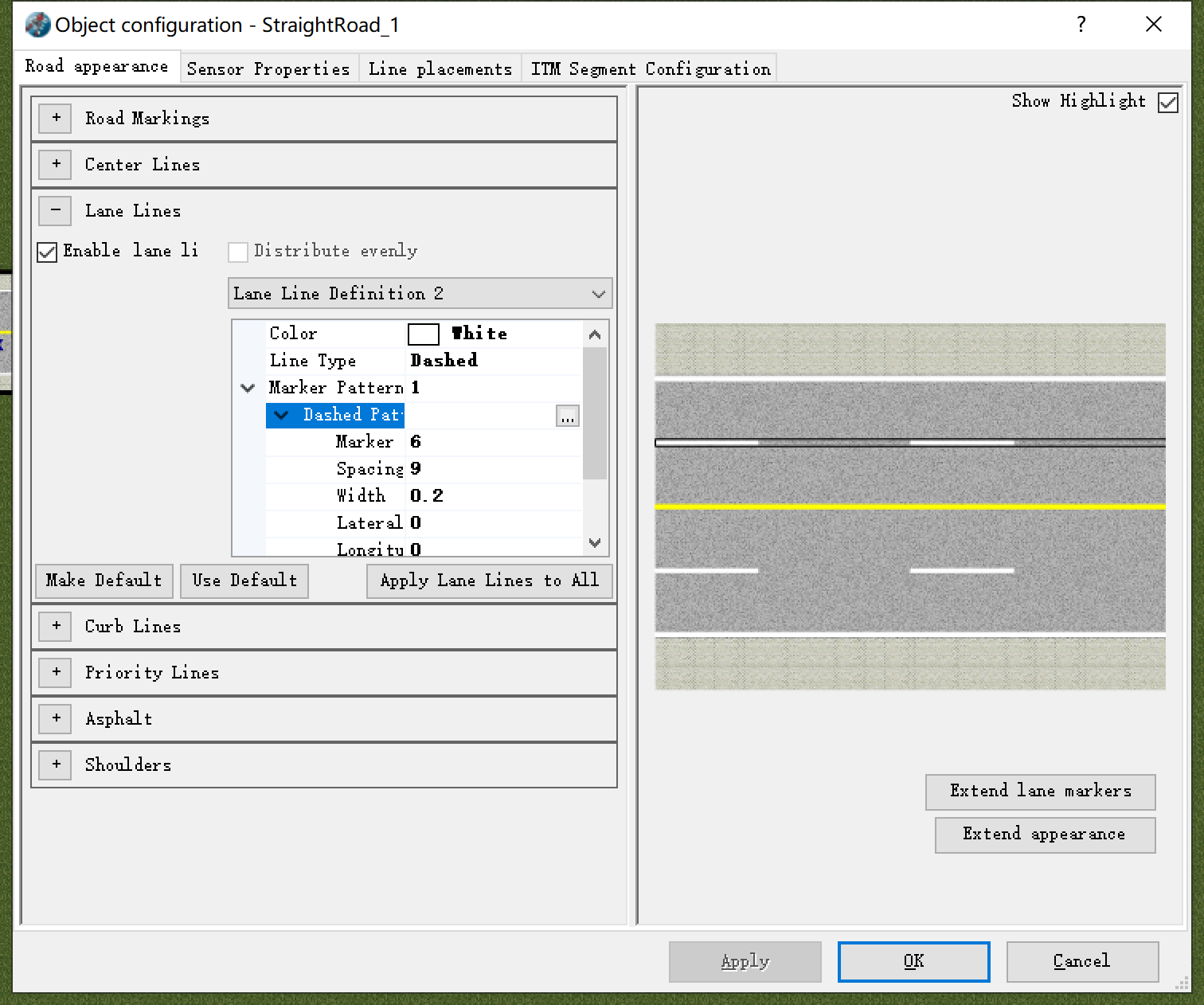
- 选择基础设施(各种形状的道路)

单击车道右键【Object configuration】,在单击车道线,可以设置车道线的属性
后续插入的道路,可以【copy style】原来道路的设置,再【paste style】到新插入的道路上。
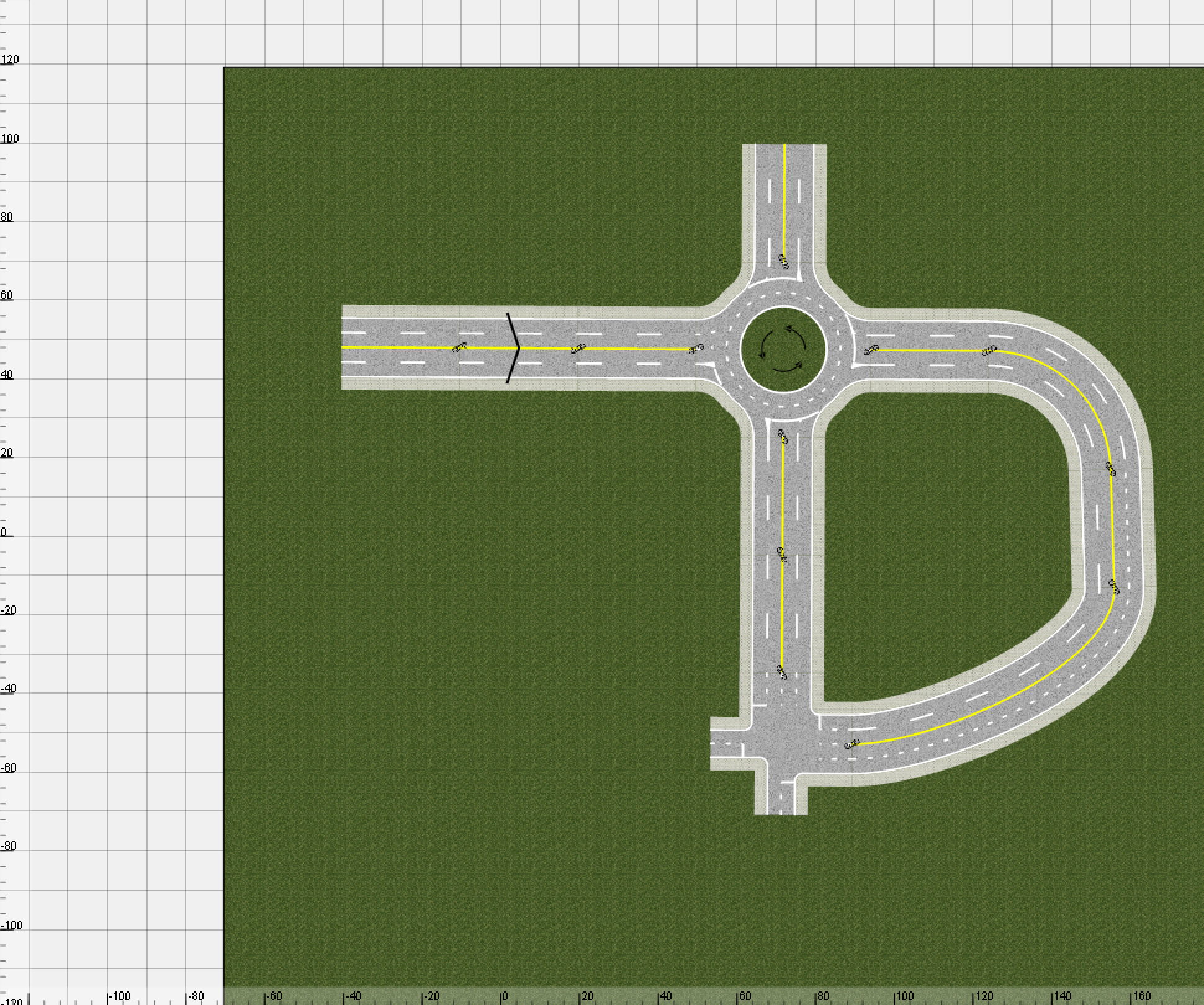
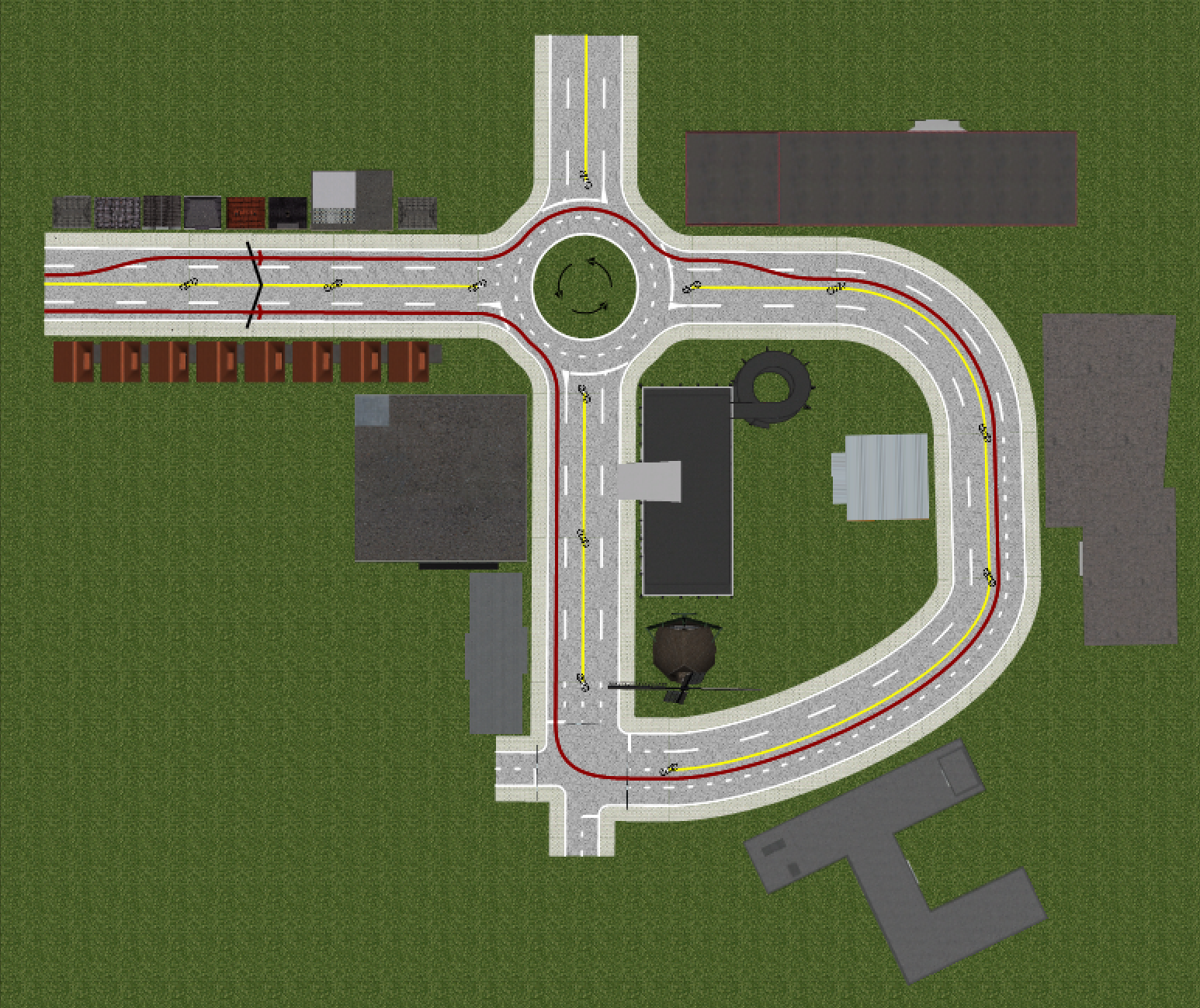
下图是我搭建的道路:
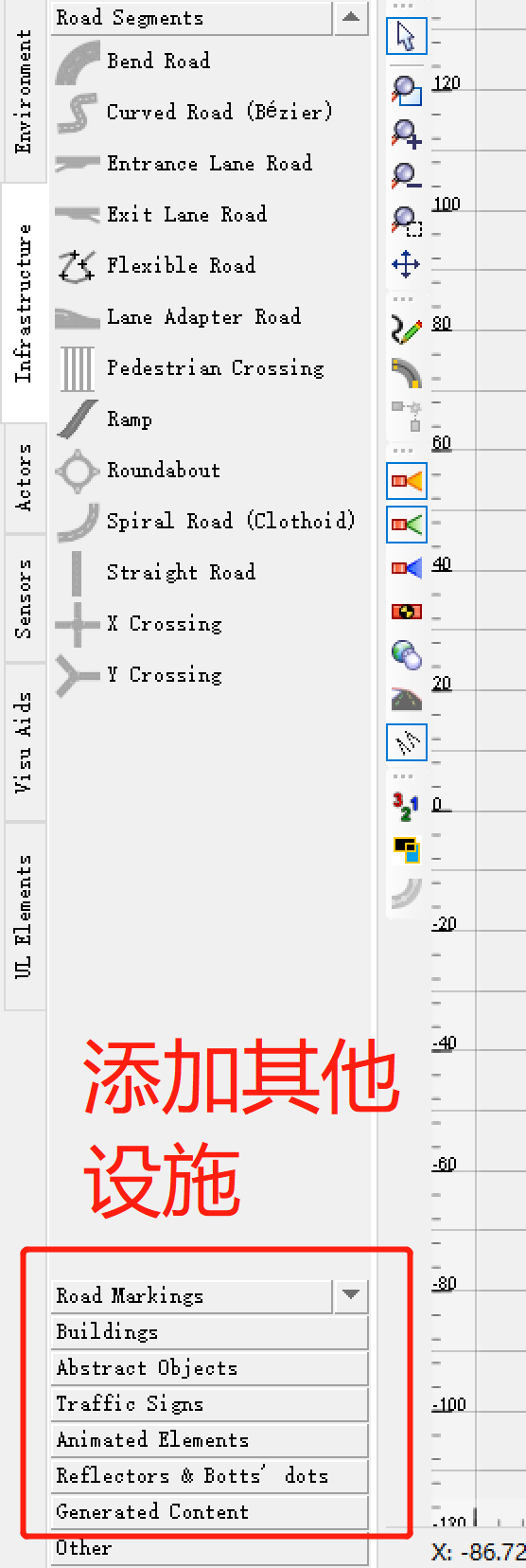
还可以添加其他设施,如道路标志、树、建筑、人等等

- 路径设置和车速设置
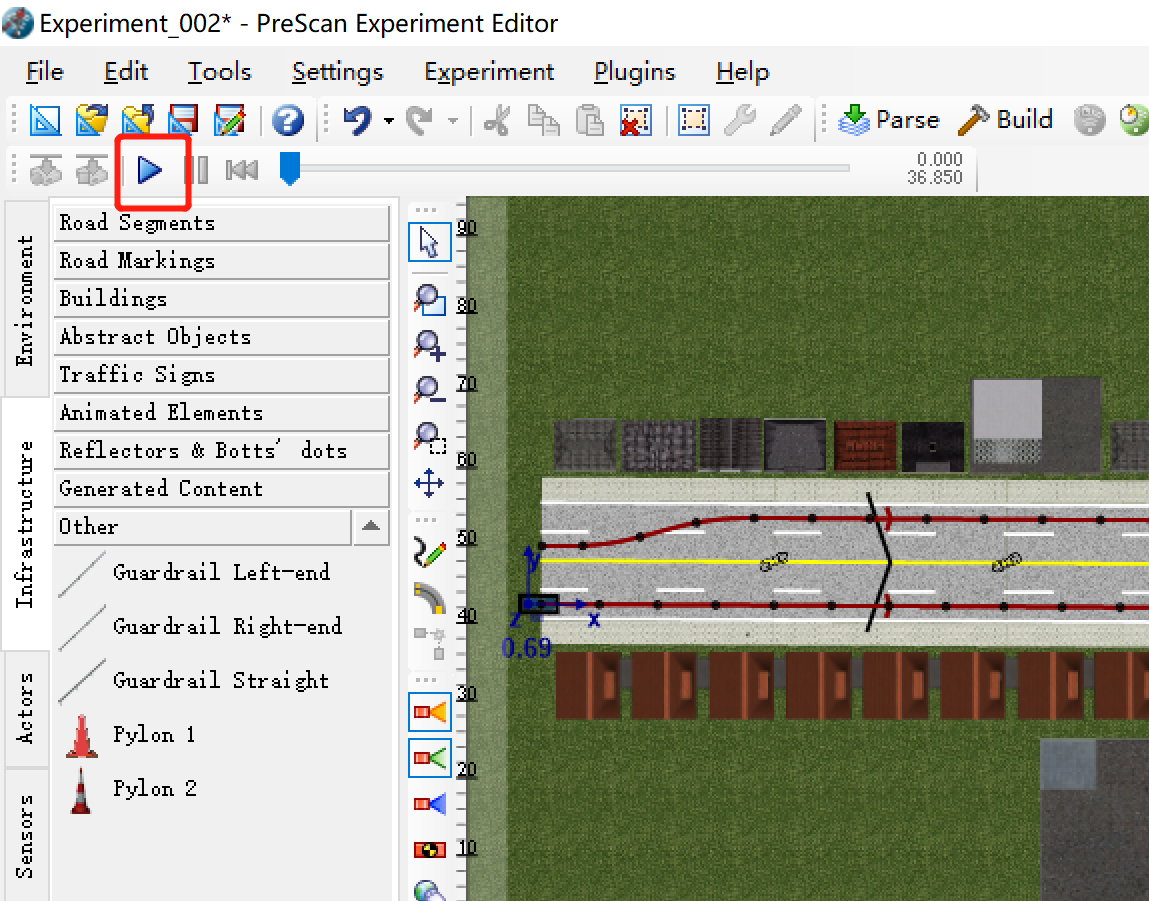
单击下图中红框按钮即可设置路径
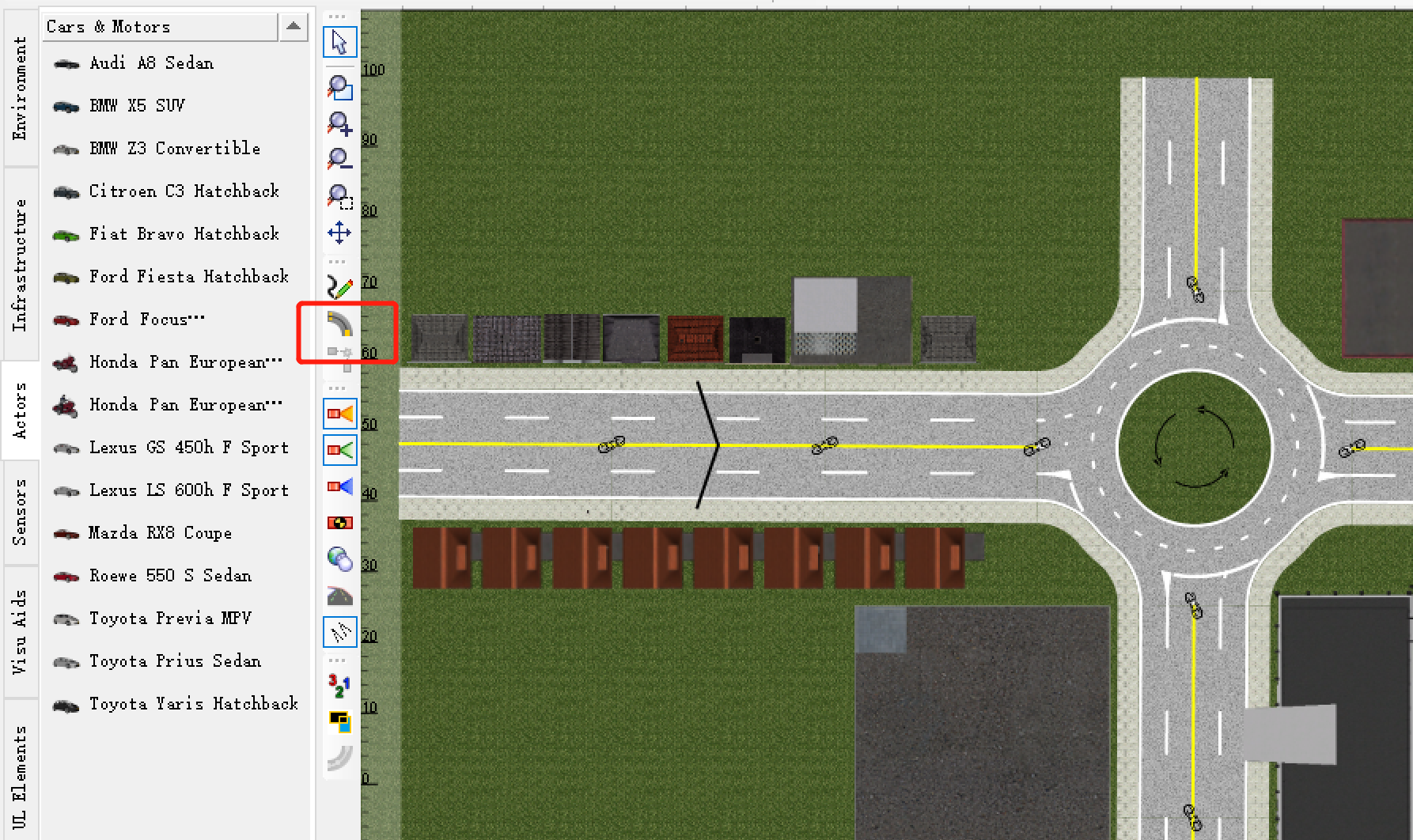
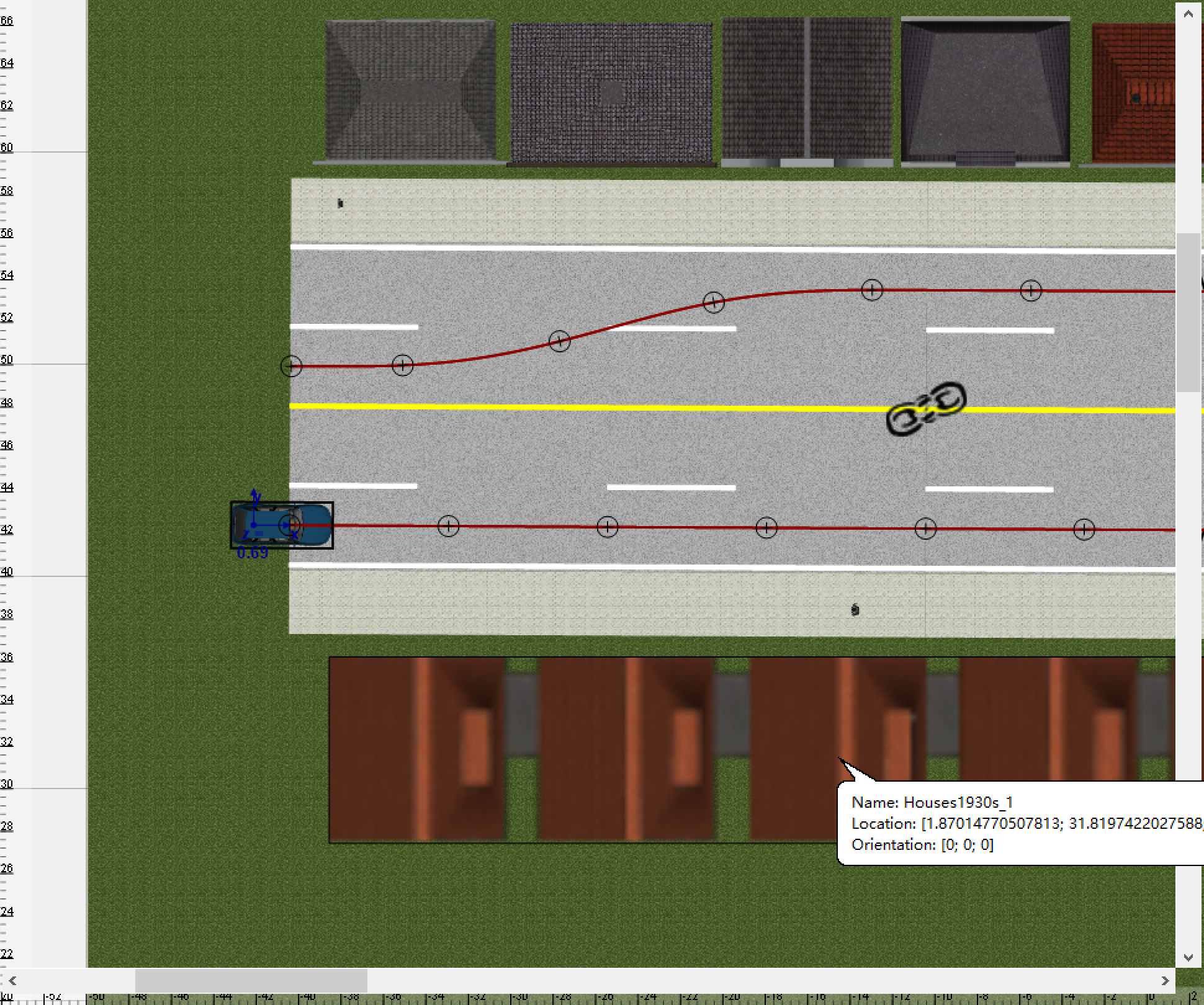
红色的线路是我规划的路径
再将车辆拖到路径上
单击播放按钮,可看到车辆行驶的2D仿真画面
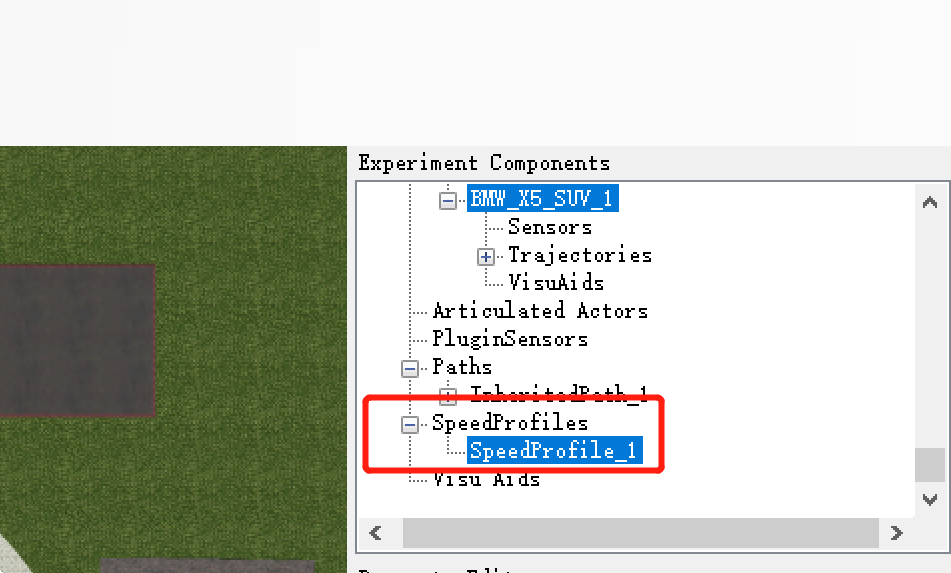
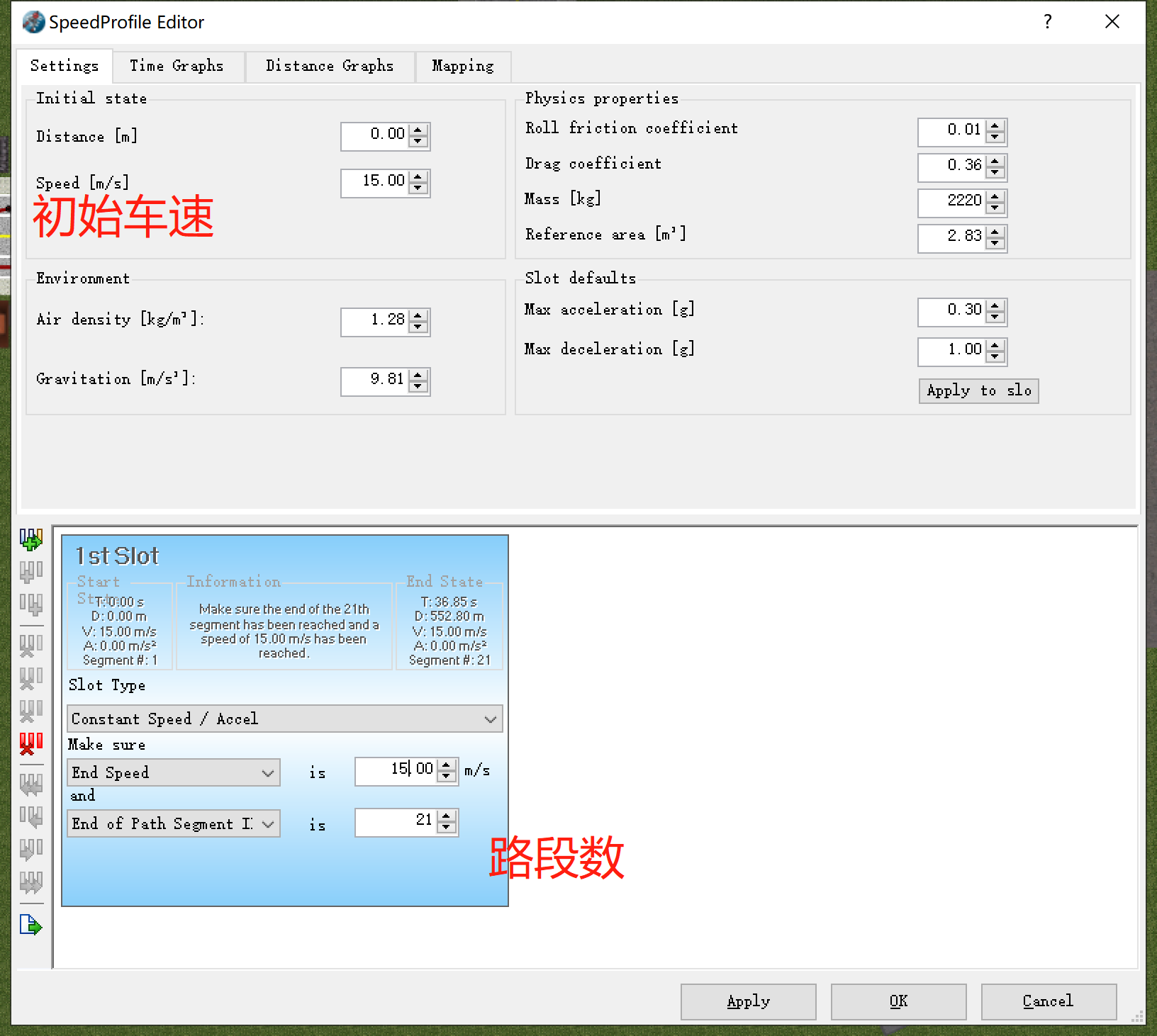
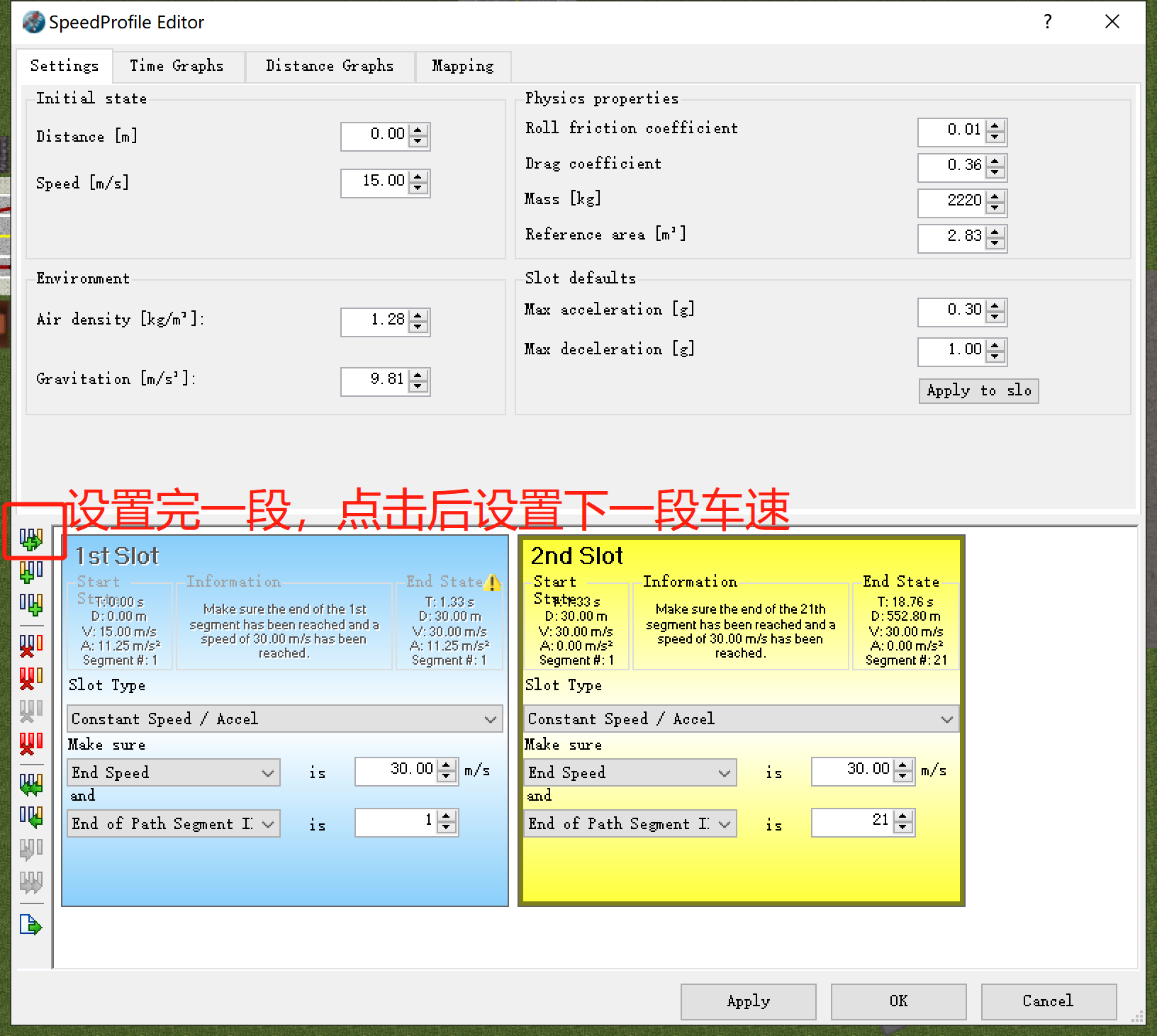
双击【SpeedProfile_1】设置每个路段的车速
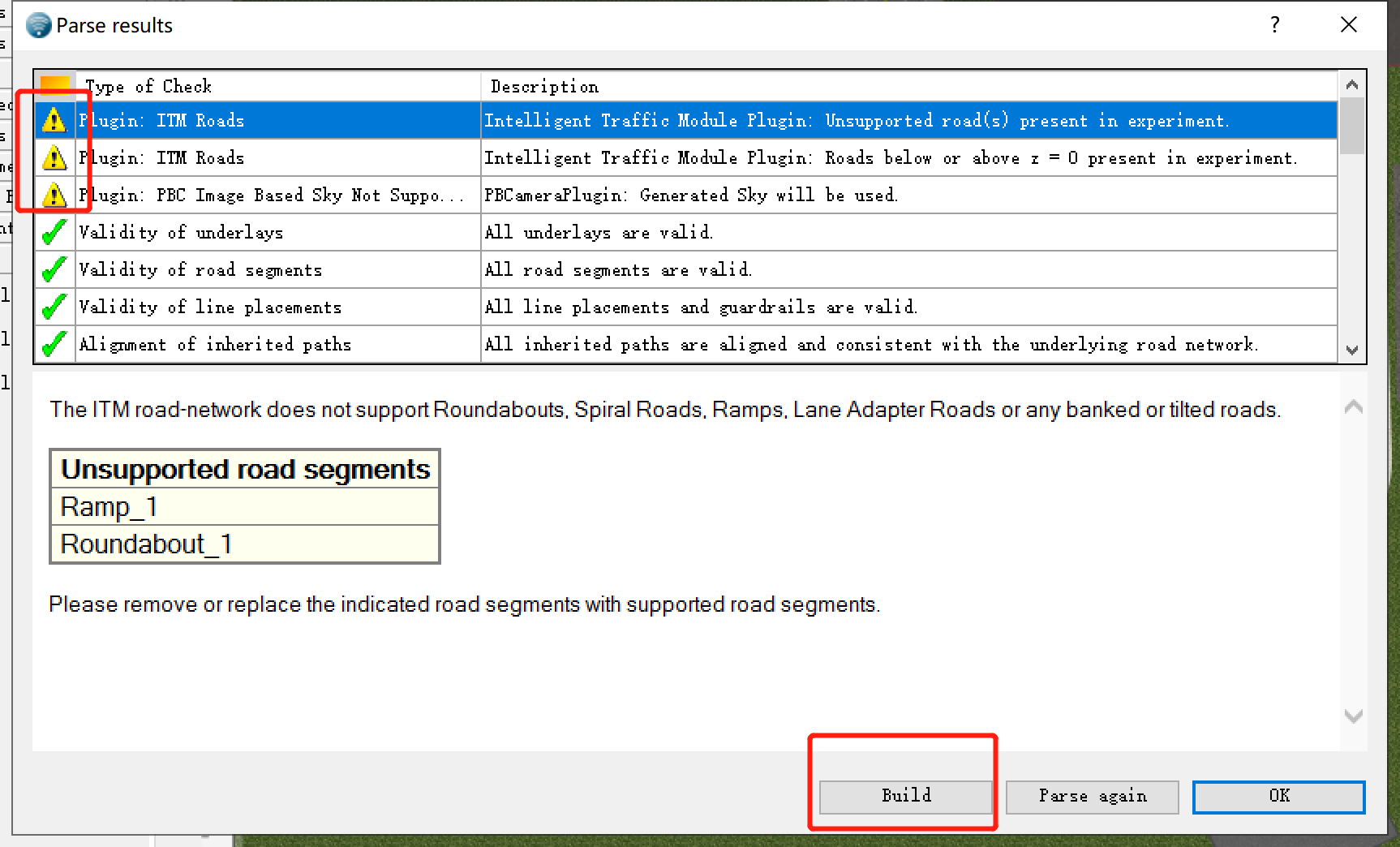
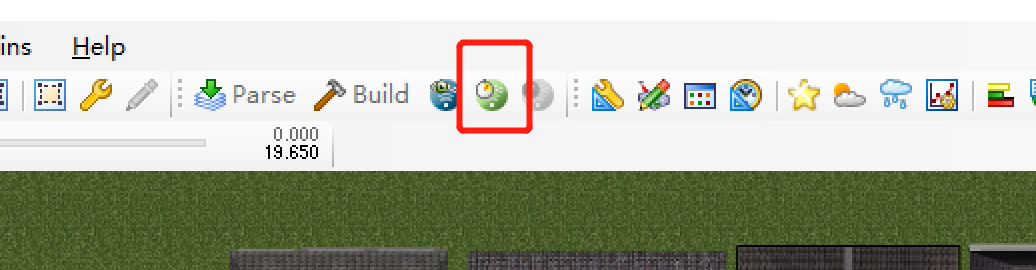
依次点如下三个按钮,【parse】调试,【build】建立,第三个是查看3D仿真

黄色中间感叹号是警告,不用管,不影响
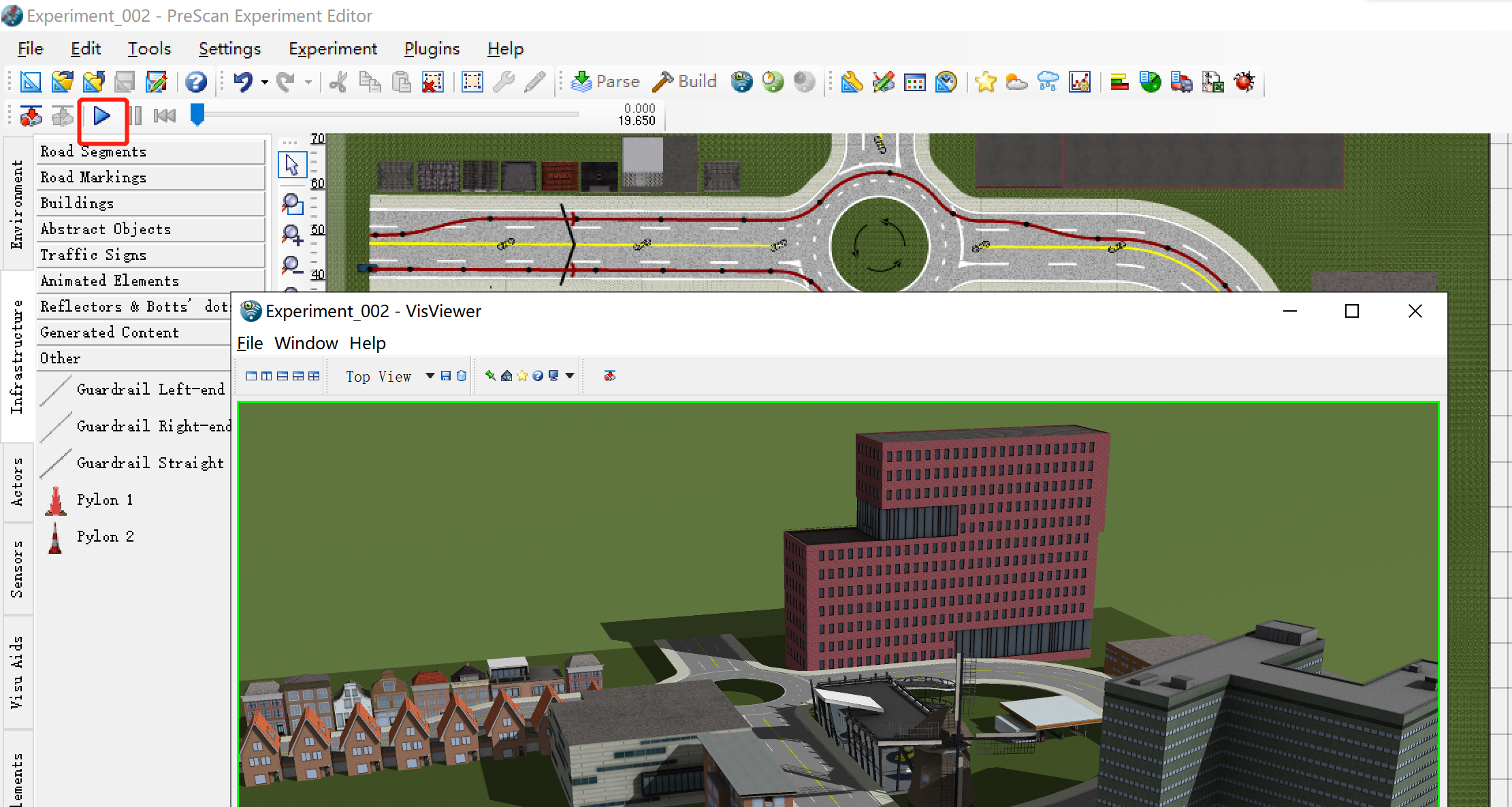
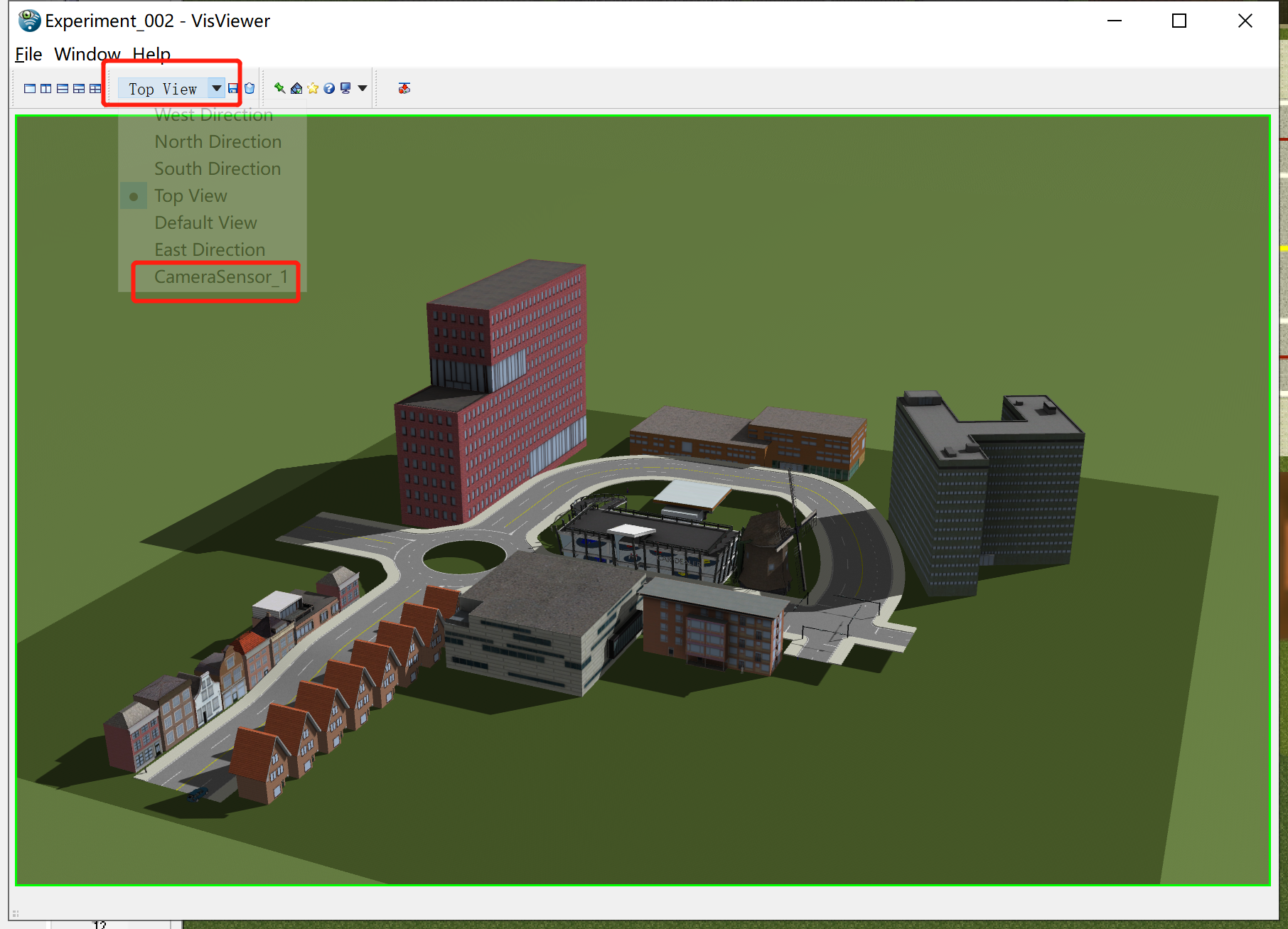
打开3D视图后可以调整大小和角度,点击2D中的播放按钮,还可以看到3D仿真车辆跑规划的路线
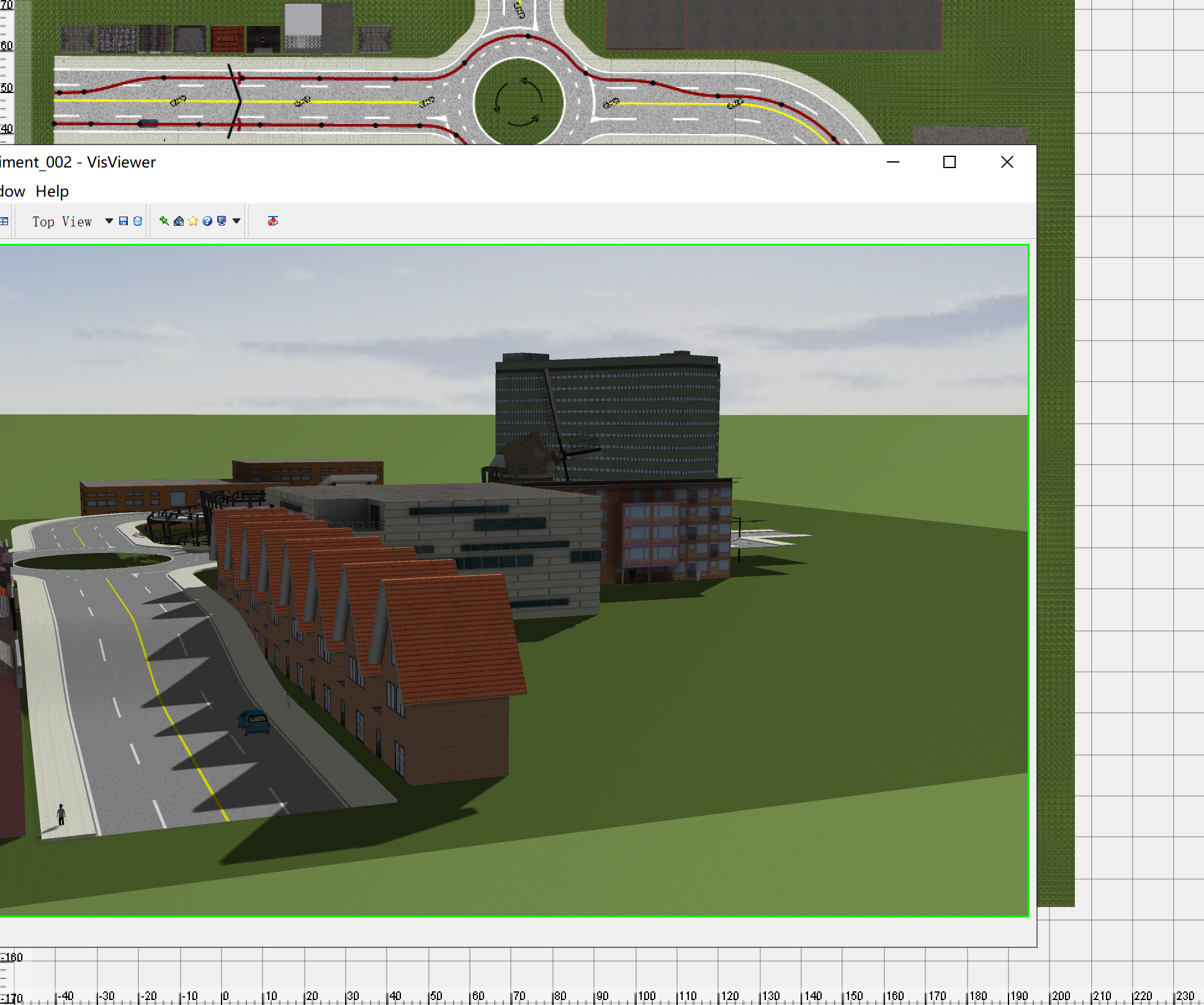
7. 添加传感器
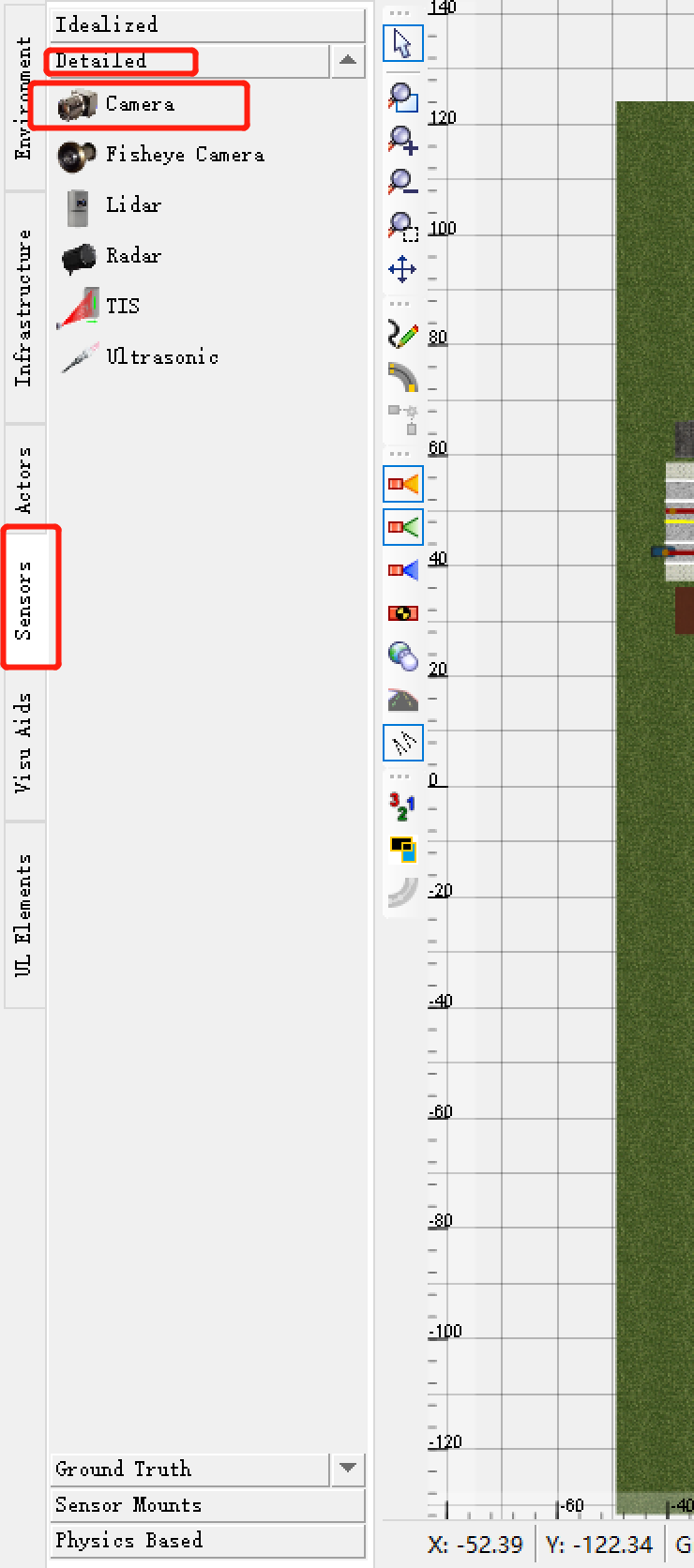
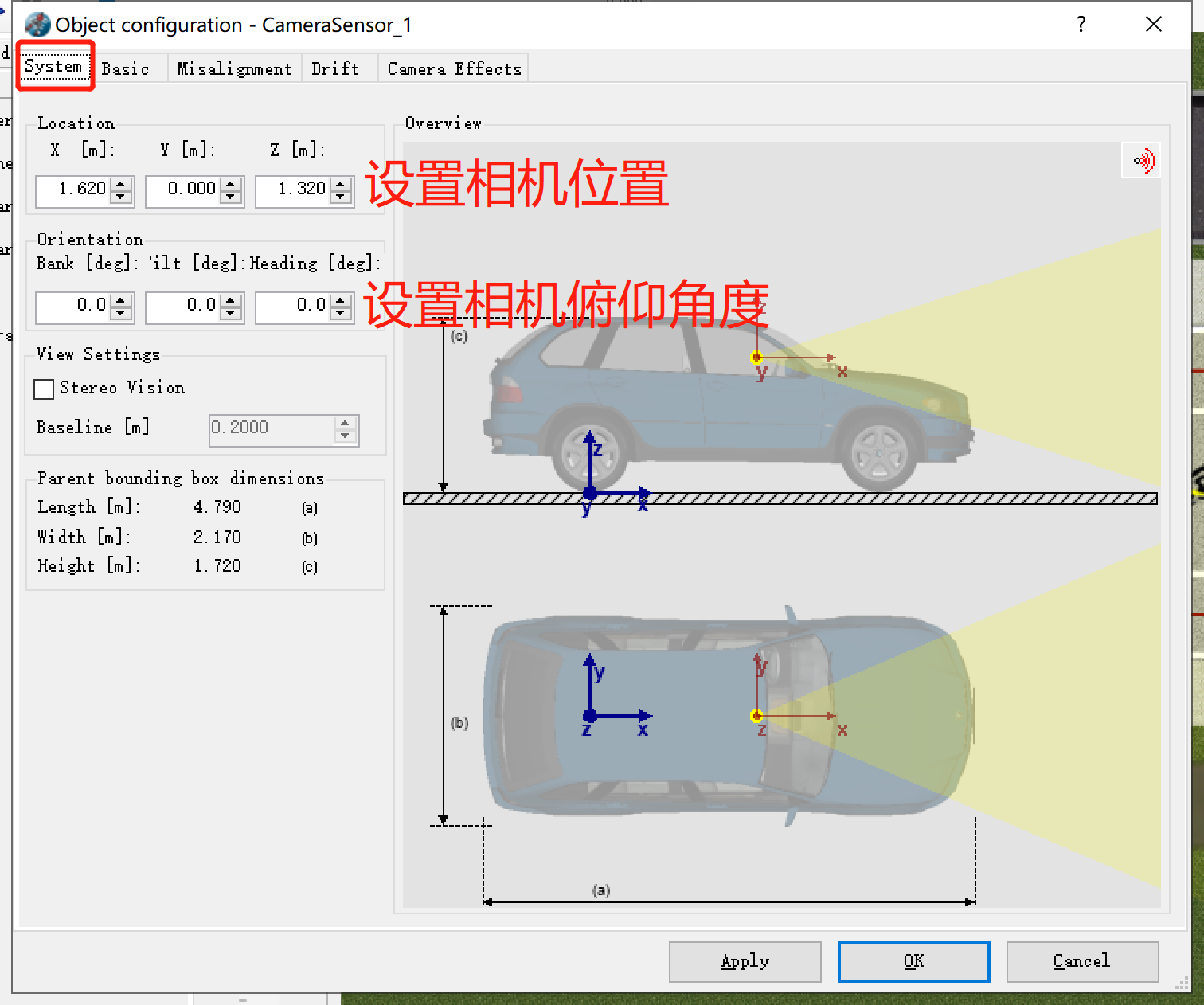
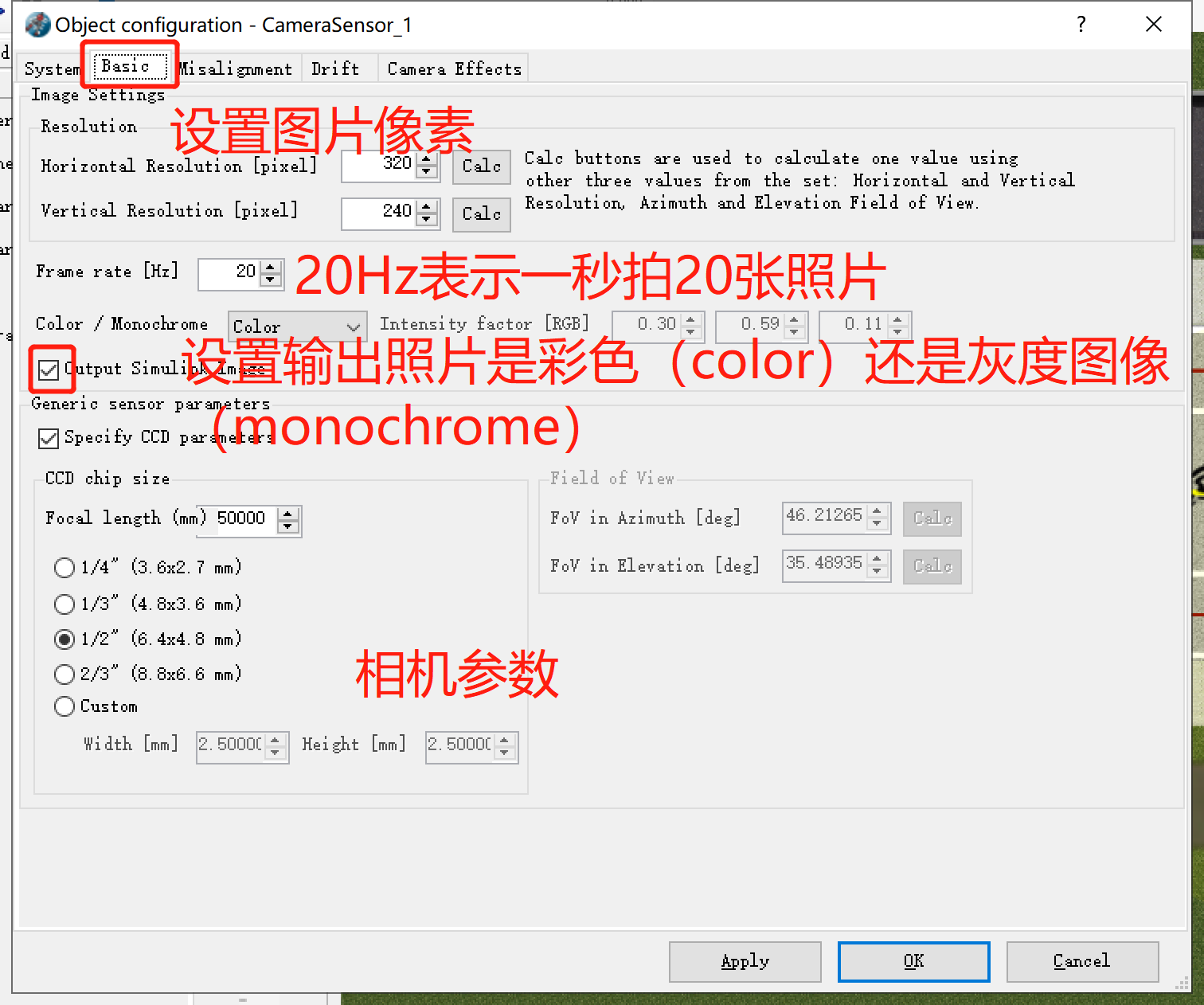
将【camera】拖到车辆上,设置相机参数
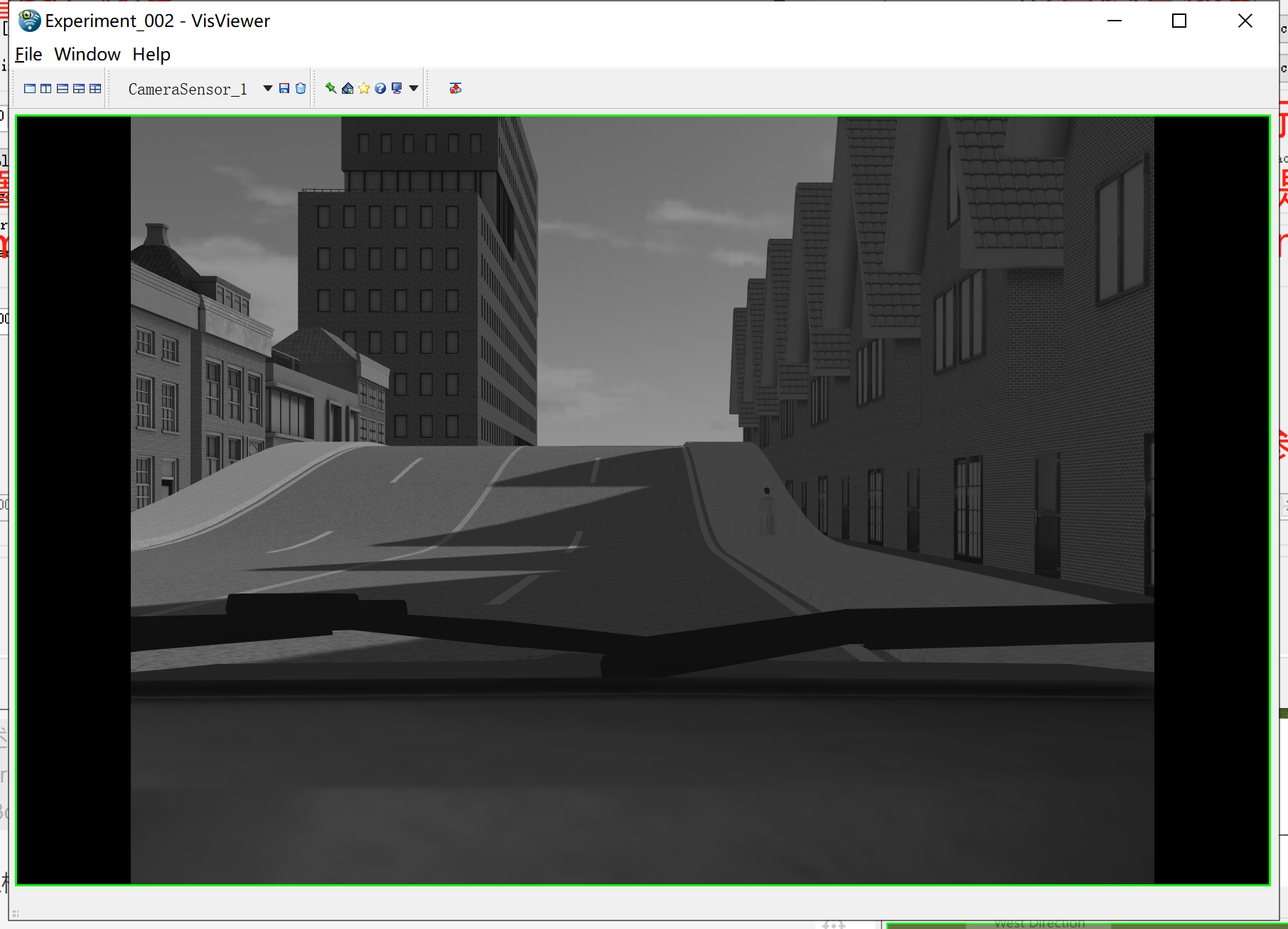
打开3D视图,可以以相机的视角查看
得到灰度图像:
8. 通过prescan打开MATLAB
在MATLAB中找到prescan项目路径
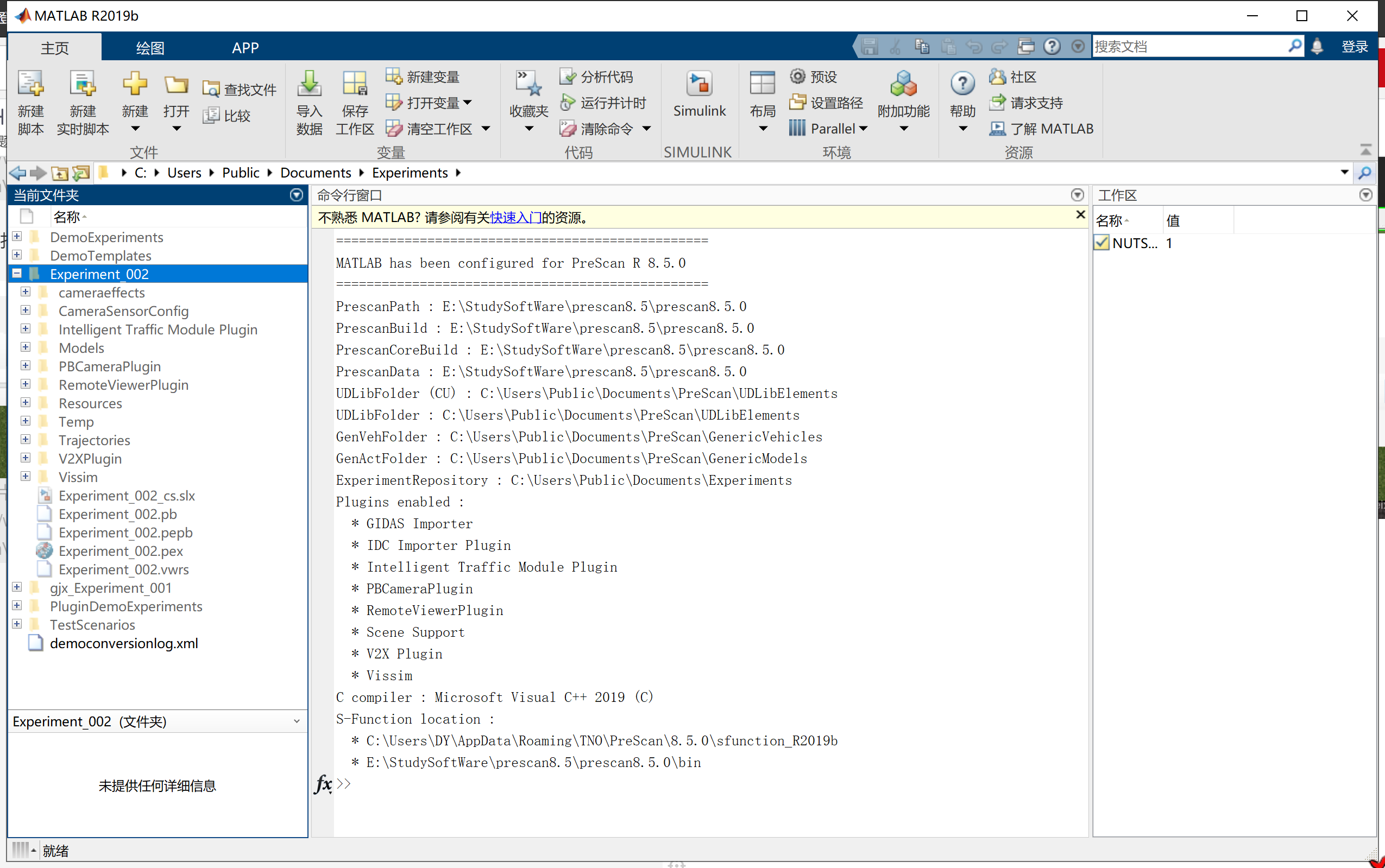
选择cs.slx文件,双击该文件
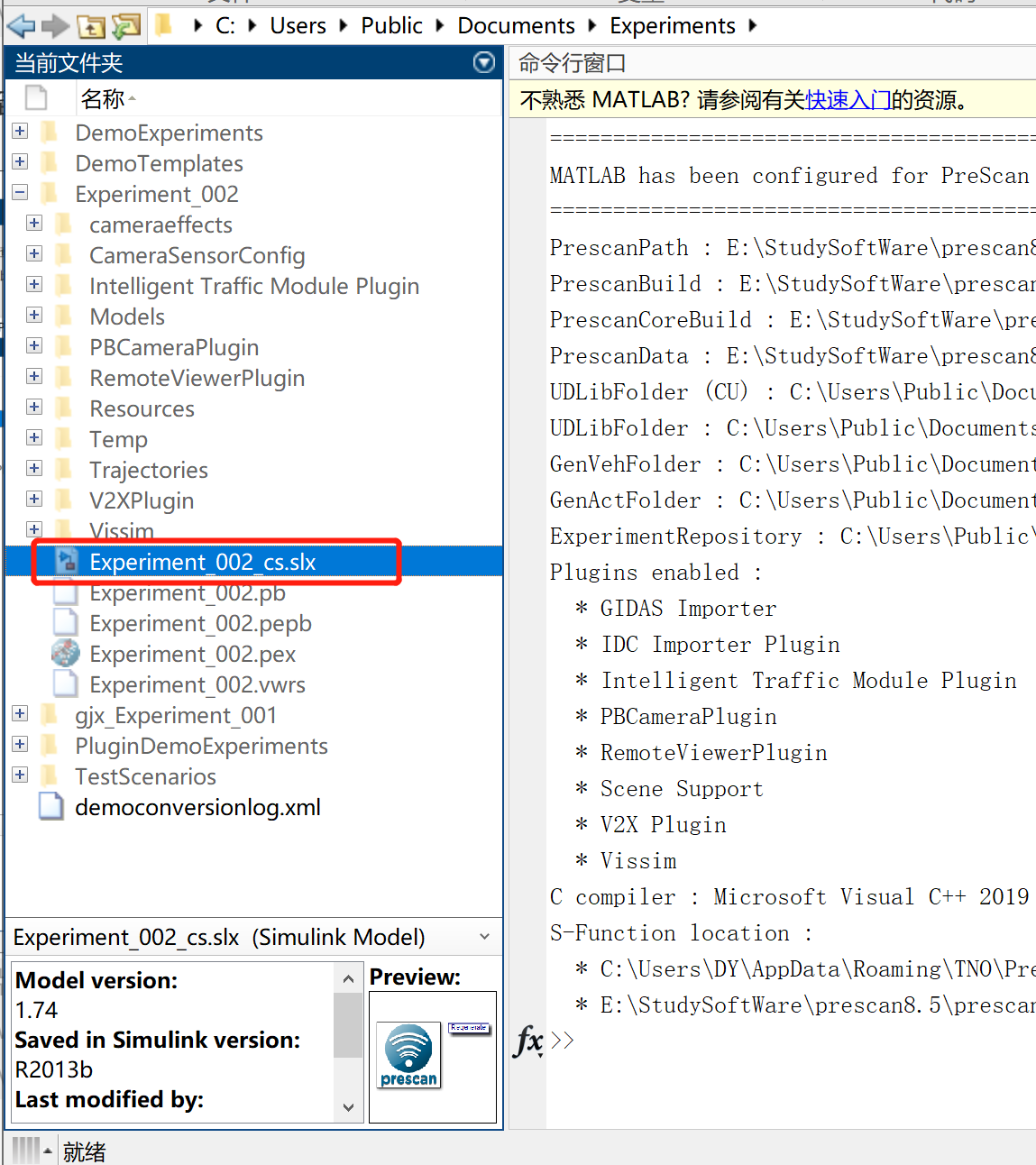
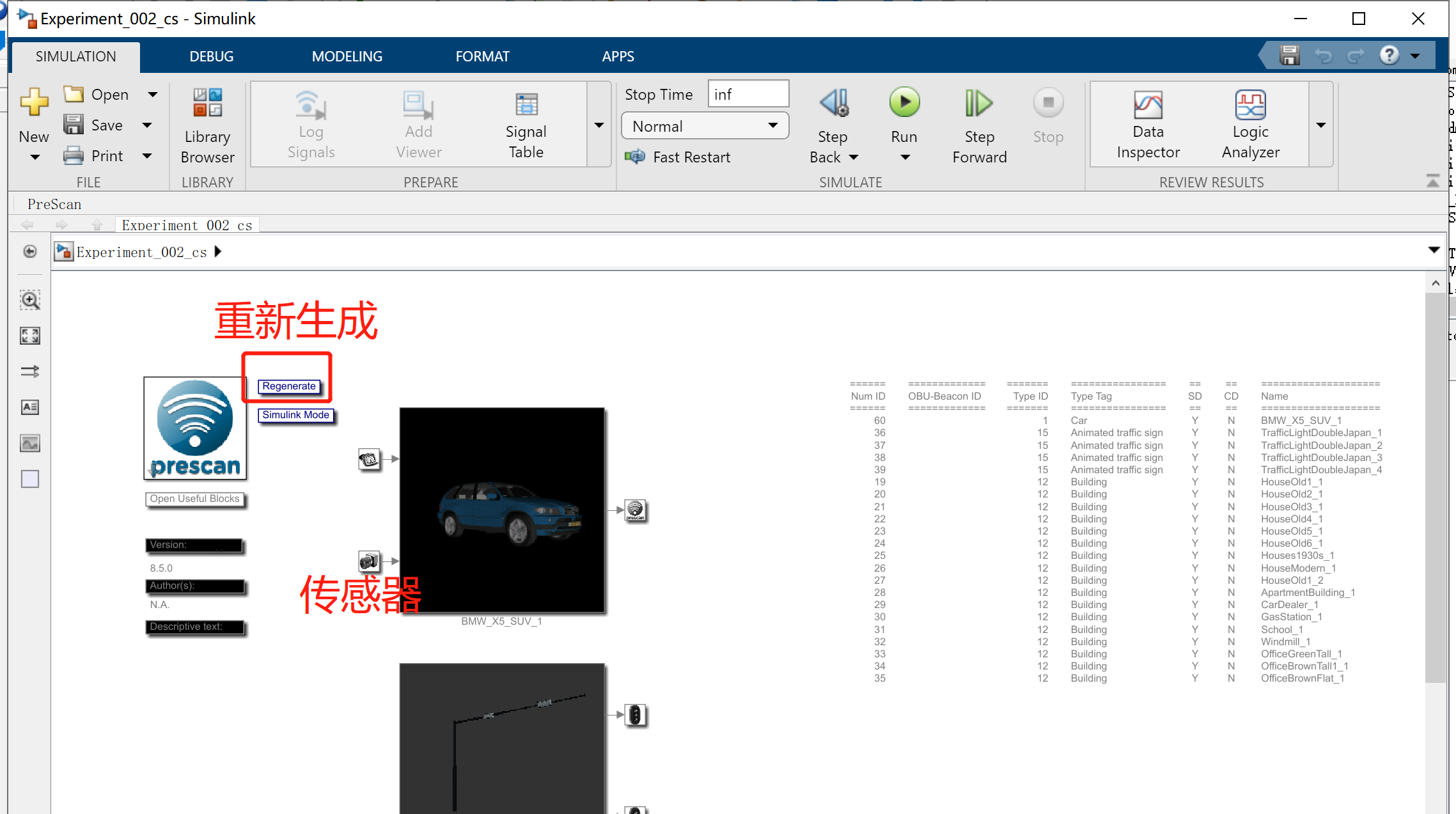
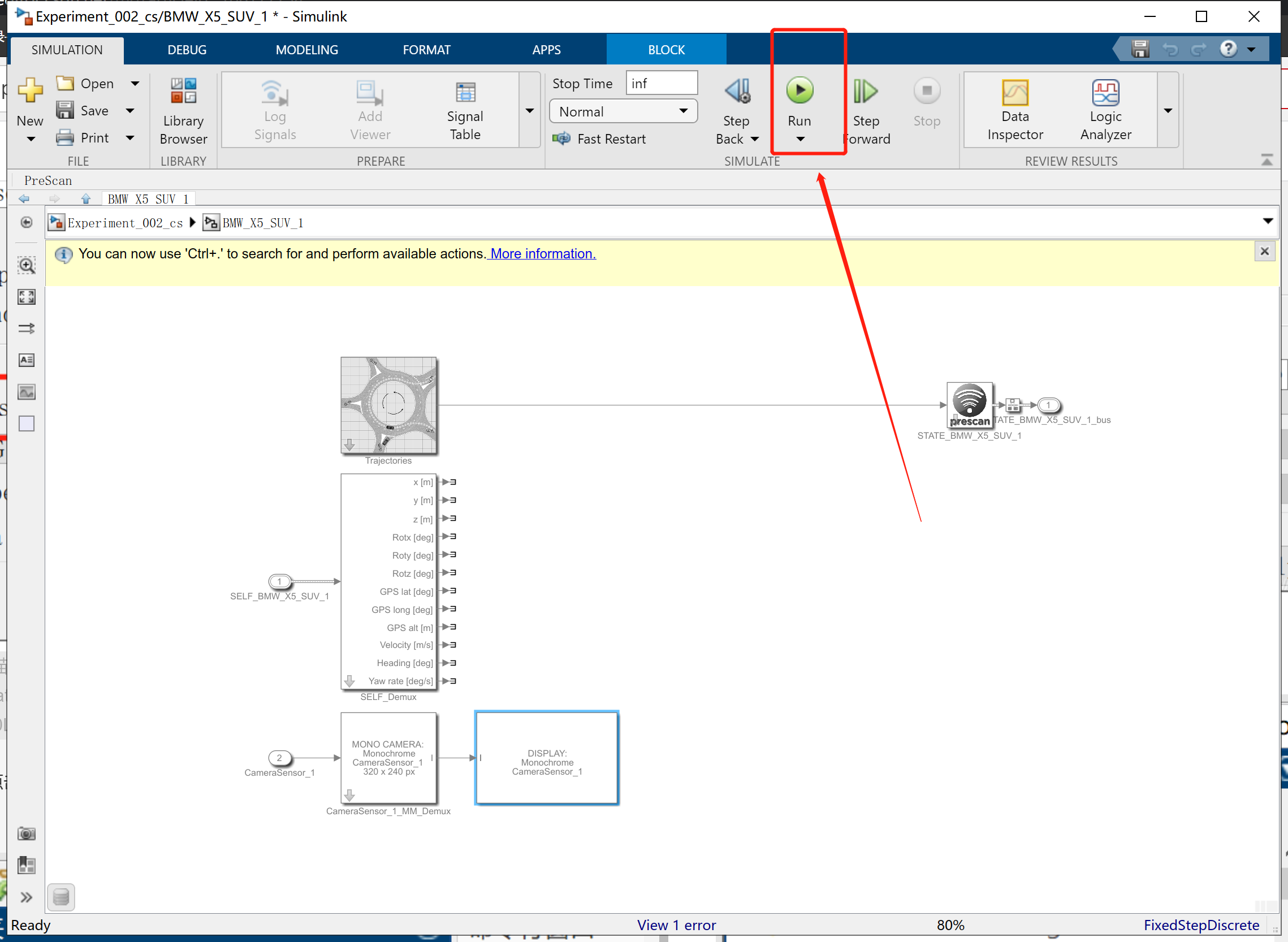
打开cs.slx文件后:
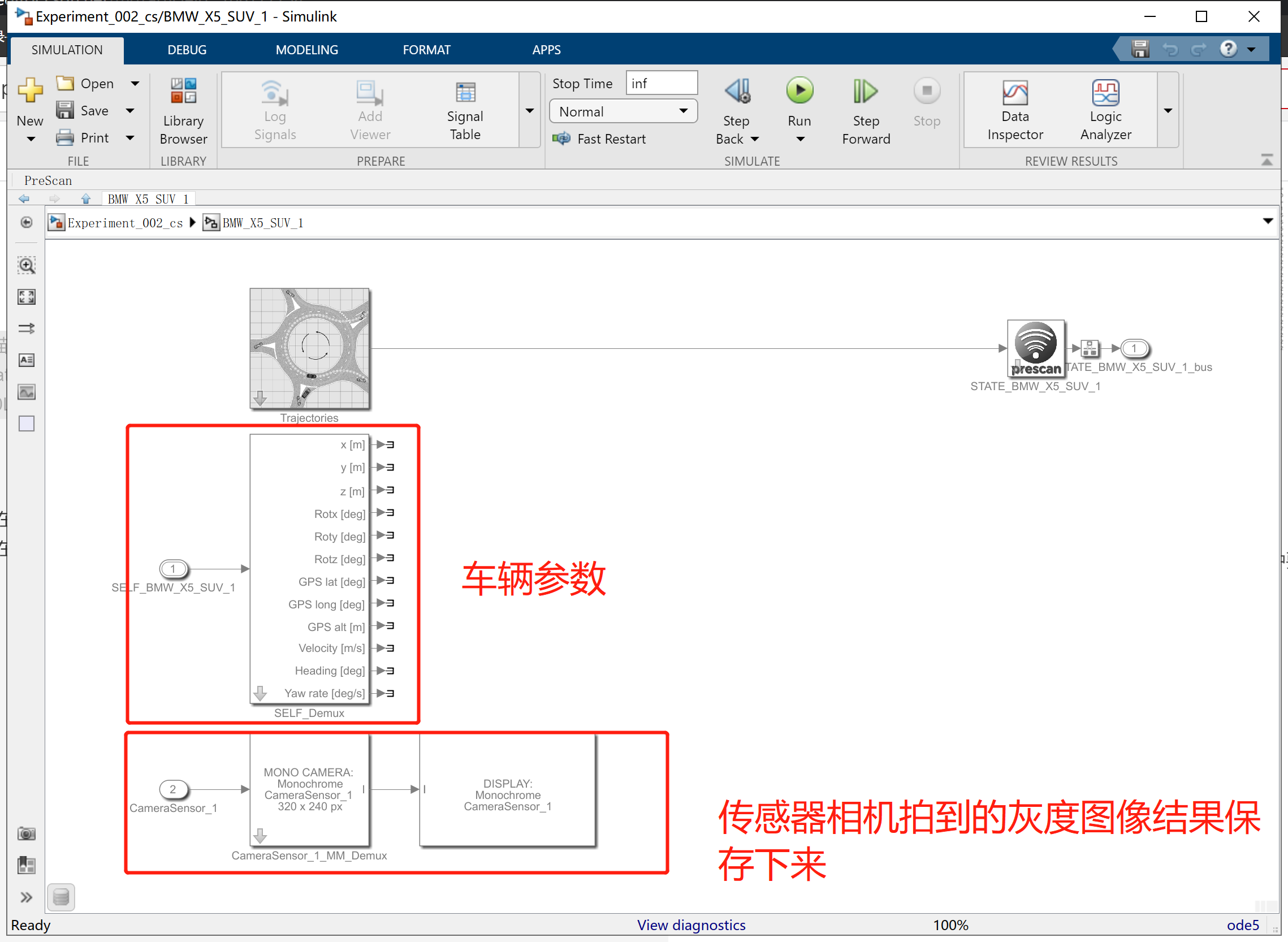
双击车辆:
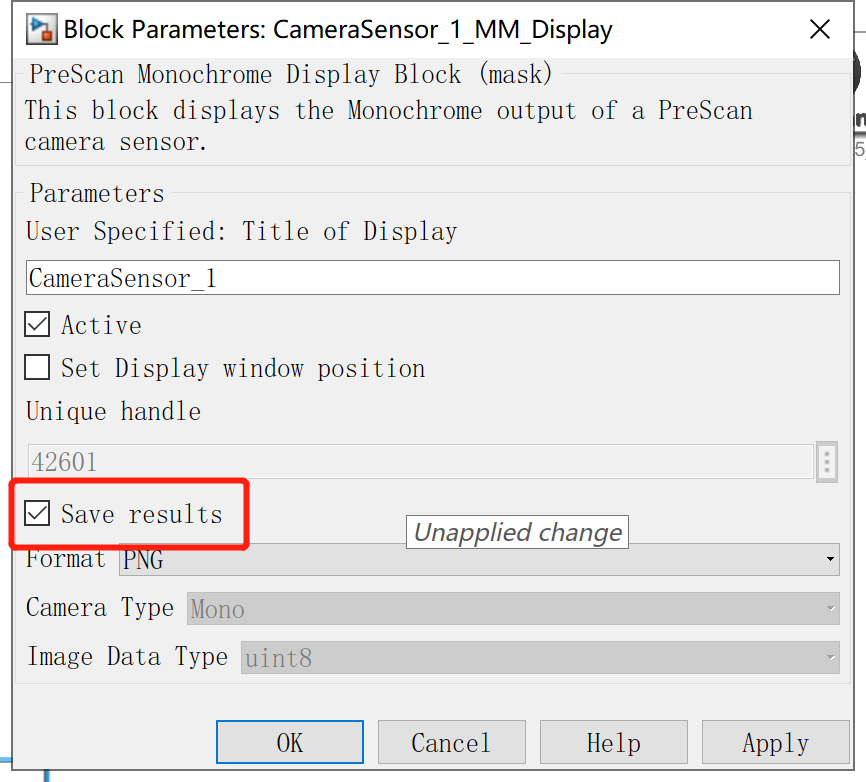
双击【DISPLAY】后,选中【save results】,即可将传感器相机拍到的图片保存下来,可以选择输出的图片格式
9. 在MATLAB中点击【run】运行
由于GPU性能不高,所以MATLAB上打开的框是黑的,不能显示prescan中车辆运行的实时画面。
有GPU独立显卡的,把GPU性能开到最高,就可以在MATLAB中看到实时画面了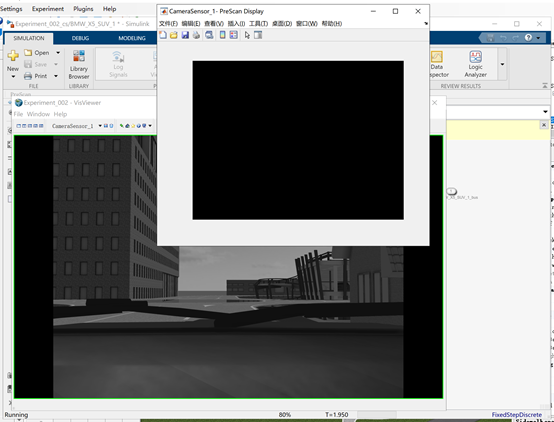
此时MATLAB中有了图片结果的文件夹: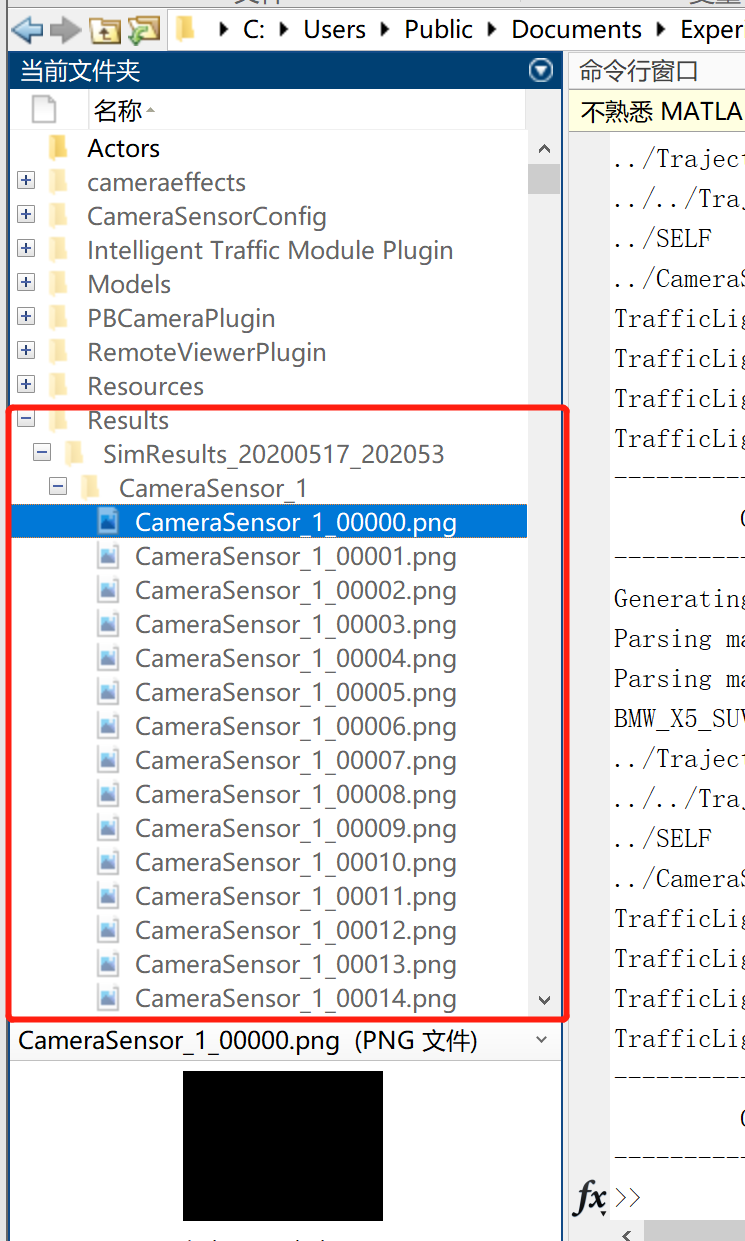
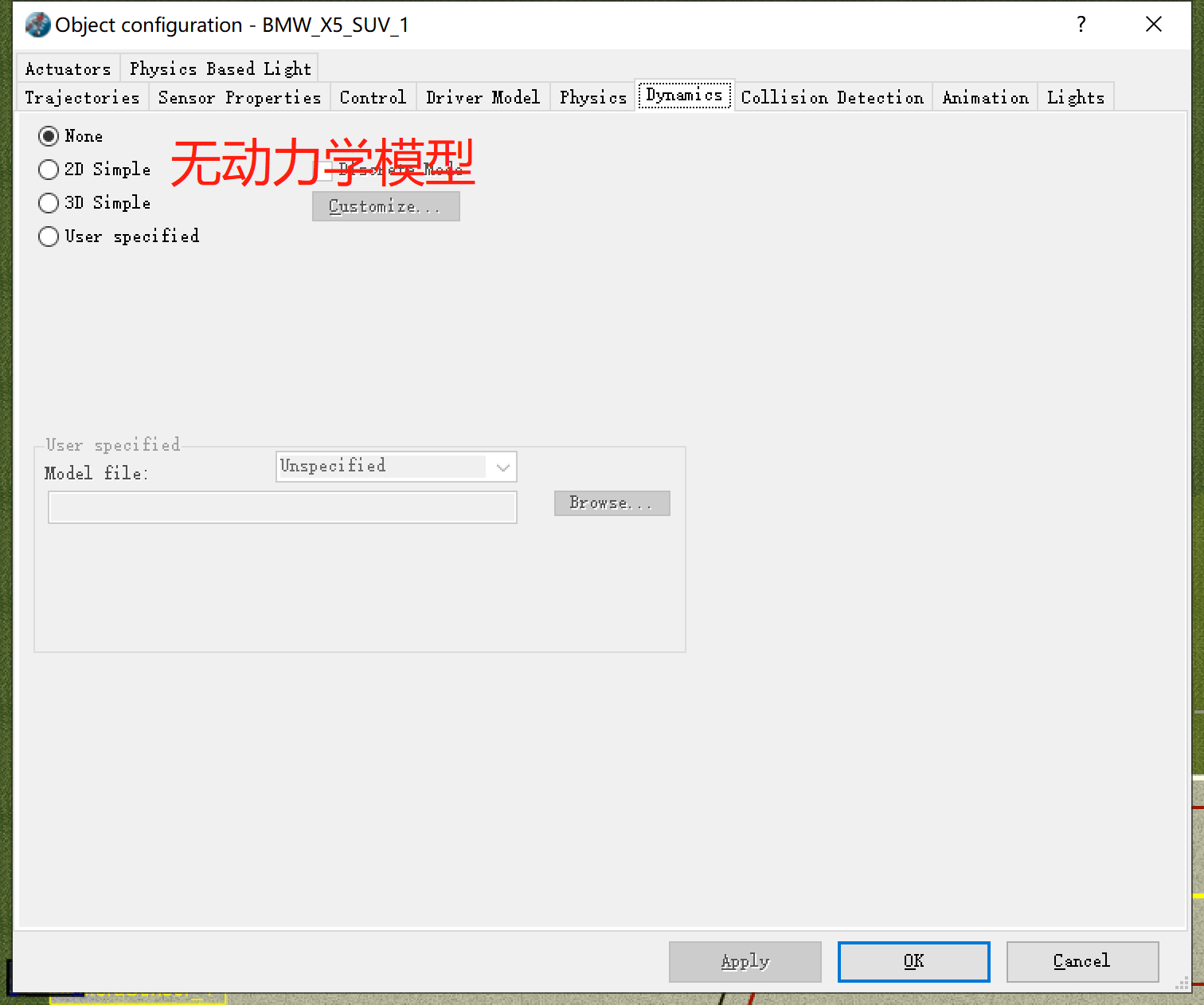
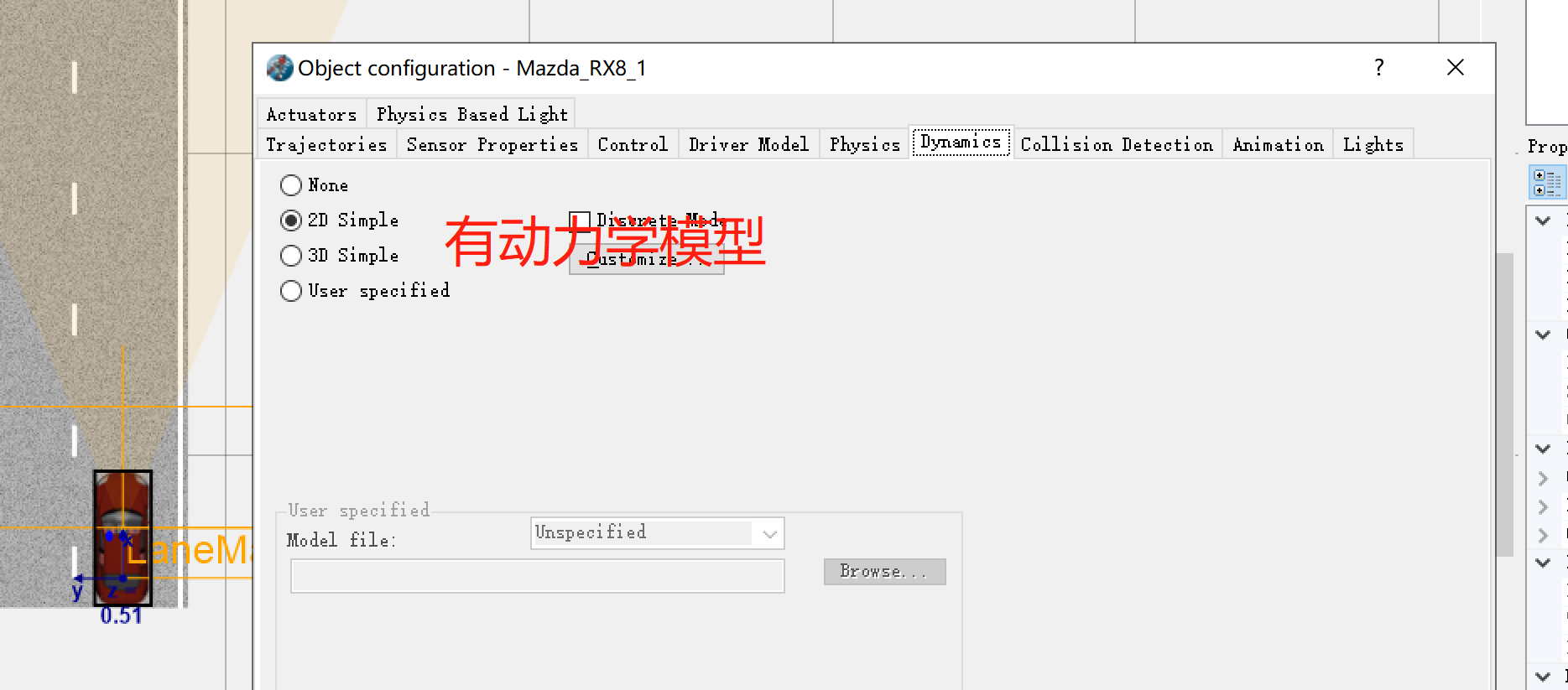
10. 动力学模型
双击车辆名字,点击【dynamics】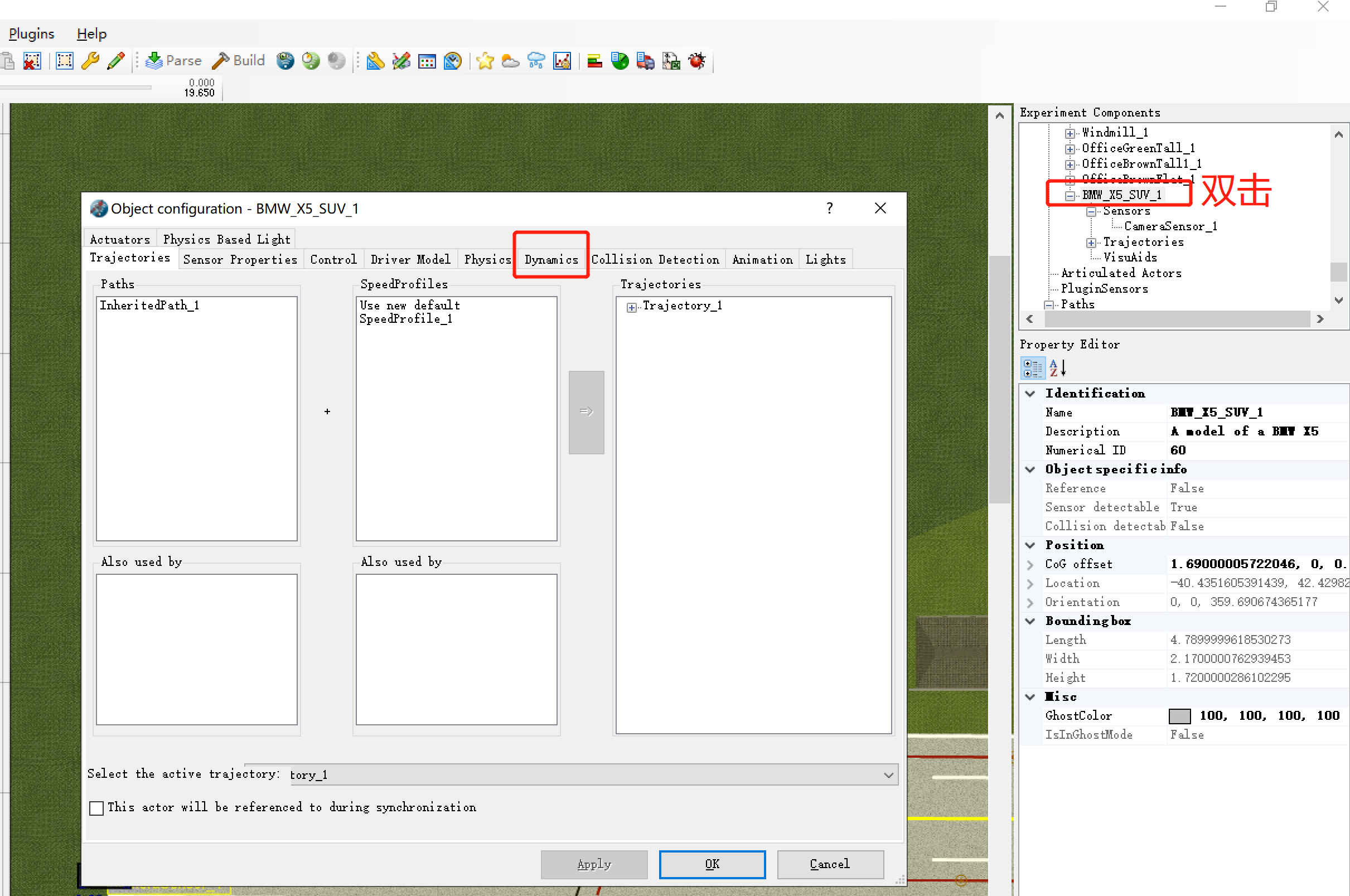
在prescan的安装目录下解压【experiments.zip】

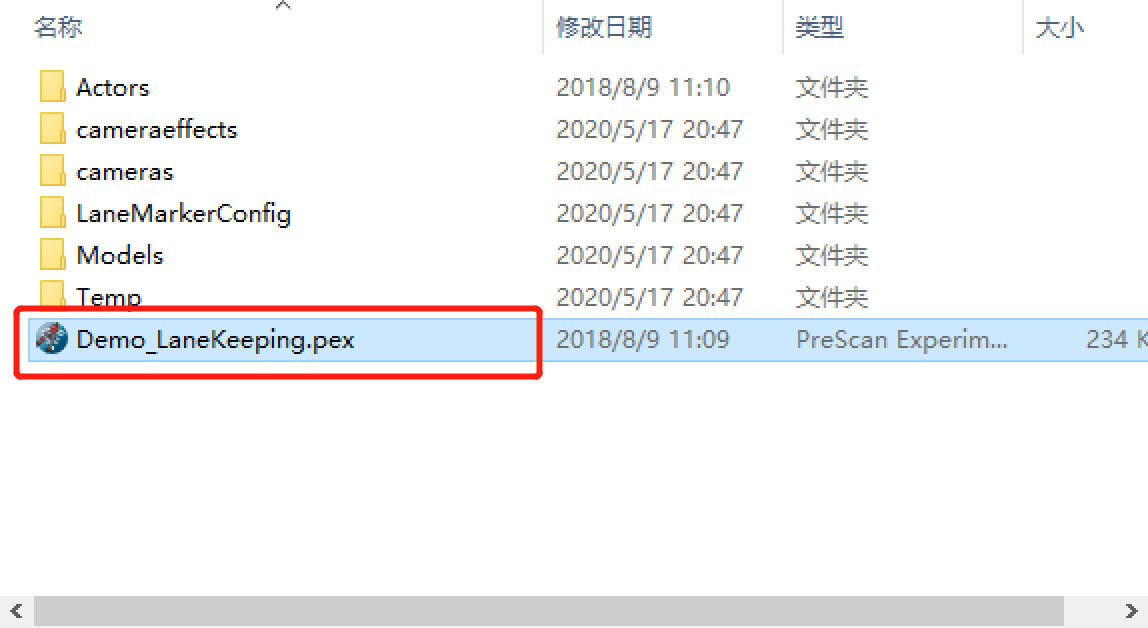
在prescan中打开解压好的模型:【file】->【open experiment】->【否】
找到prescan安装路径,刚刚解压的【experiments】中的【DemoExperiments】文件夹,以车道线保持【Demo_LaneKeeping】为例,打开如下的.pex文件->【是】
再【parse】->【bulid】->【nvoke Simulink Run Mode】开启MATLAB
再在MATLAB中找到项目路径,打开Demo_LaneKeeping_cs.slx文件,即加入动力学模型之后的:
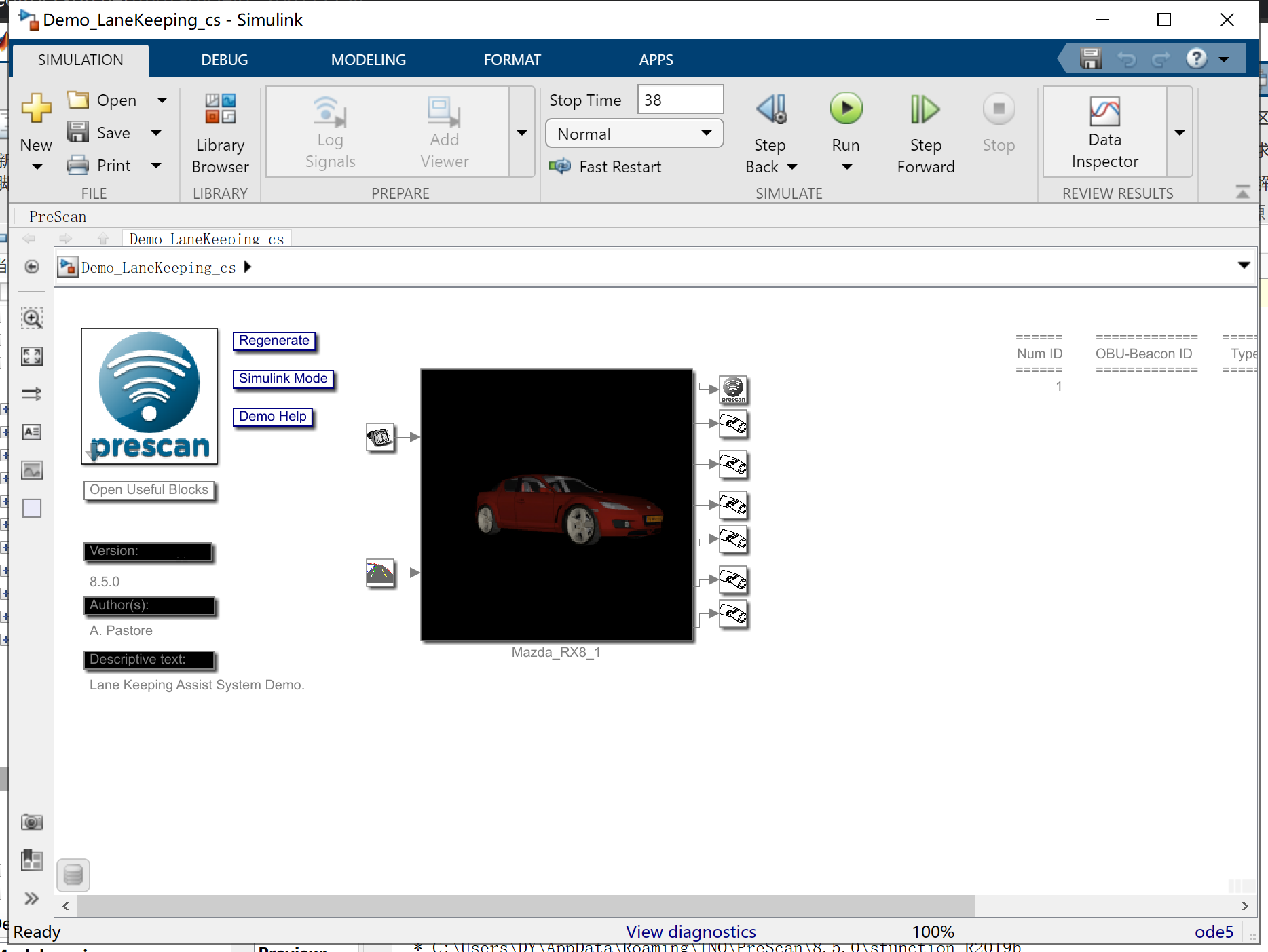
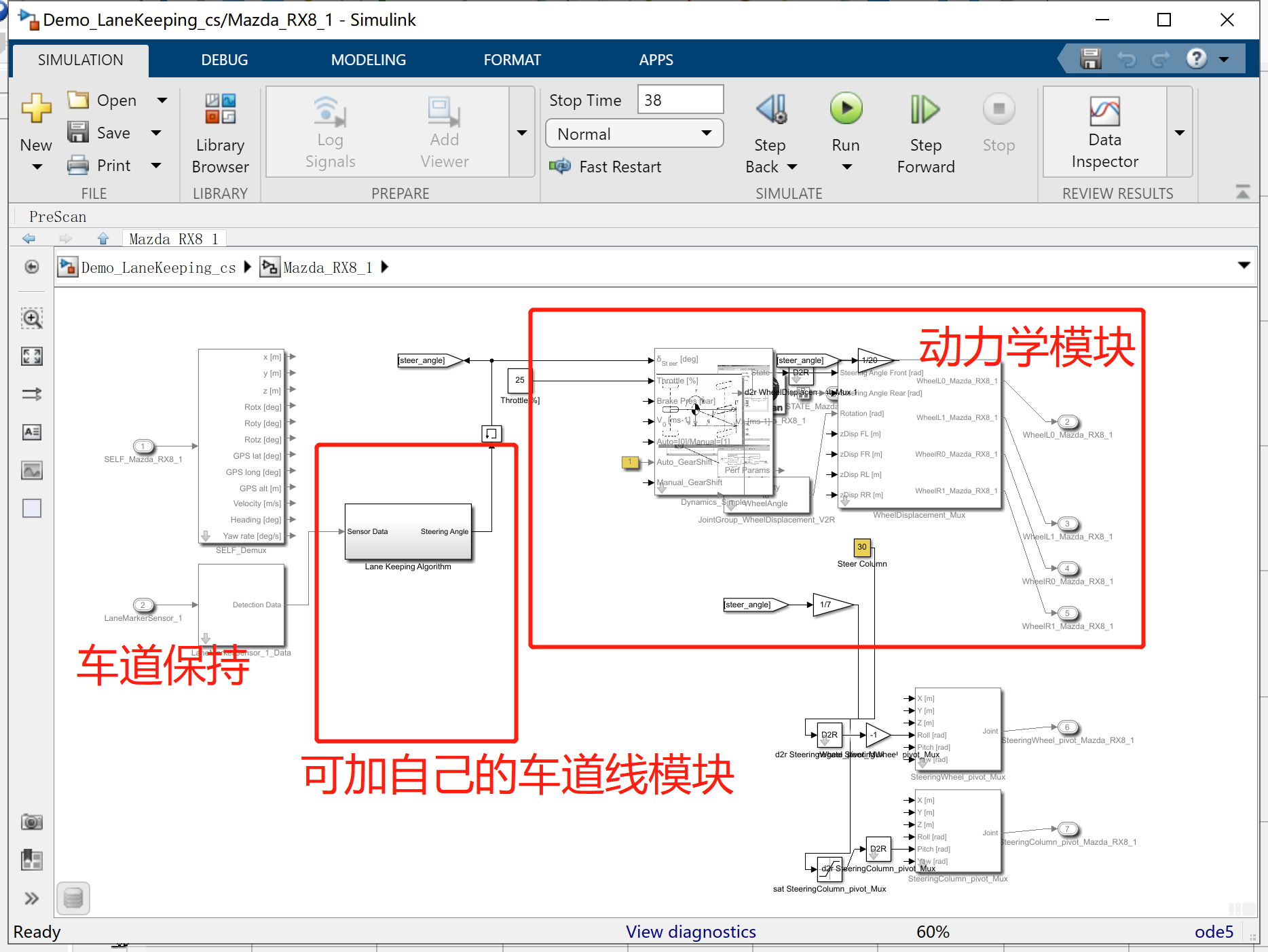
有了动力学后,车可以自己行驶,不需要规划路径
【注意】:1.每次在prescan中设置属性后要点击【apply】
2.每次在prescan中有修改,要重新【parse】—>【build】,MATLAB中要重新【regenerate】
最后
以上就是大力纸飞机最近收集整理的关于【prescan入门】prescan入门教程(场景搭建、参数设置、连接MATLAB实现仿真)的全部内容,更多相关【prescan入门】prescan入门教程(场景搭建、参数设置、连接MATLAB实现仿真)内容请搜索靠谱客的其他文章。








发表评论 取消回复