引言
自动驾驶主车(Autonomous Driving Car ,ADC)行驶时,周围的车辆及行人在接下来的几秒内将要做什么?是否有碰撞的可能?这对于实现安全的自动驾驶而言至关重要,这也是自动驾驶领域中的轨迹预测模块的问题:对周边车辆、行人在接下来数秒时间的多种行为状态进行预测,进一步影响主车的路径规划。
近几年中自动驾驶行为预测领域很火的一种方式是——采用类似VectorNet(《VectorNet: Encoding HD Maps and Agent Dynamics from Vectorized Representation》)这个分层的图神经网络的思想,将道路等静态环境信息以及动态交通参与者的运动轨迹均进行编码,编码后经过类似TNT (《TNT:Target-driveN Trajectory Predictio》)思想的方式进行轨迹预测。
2021年12月29日,Apollo7.0版本正式发布。本次7.0版本预测模块更新部分的核心思路与上述两篇论文非常接近,但主要区别在于使用MLP(多层感知机)替代了GCN(图神经网络),以及增加了更加丰富的工程化的优化方式。
本文就Apollo7.0的预测模块及其所涉及技术进行分享。
注:文章图片来自Apollo7.0技术分享课内容及相关论文,参考文献附于文末。
预测模块概述
整体框架
绿色表示预测模块所依赖的上游模块,包括了规划、定位、感知、Storytelling和高精度地图,下游是规划模块。
红色虚线框内是预测模块的整体逻辑,包含容器(Container),场景(Scenario)、评估器(Evaluator)和预测器(Predictor)。
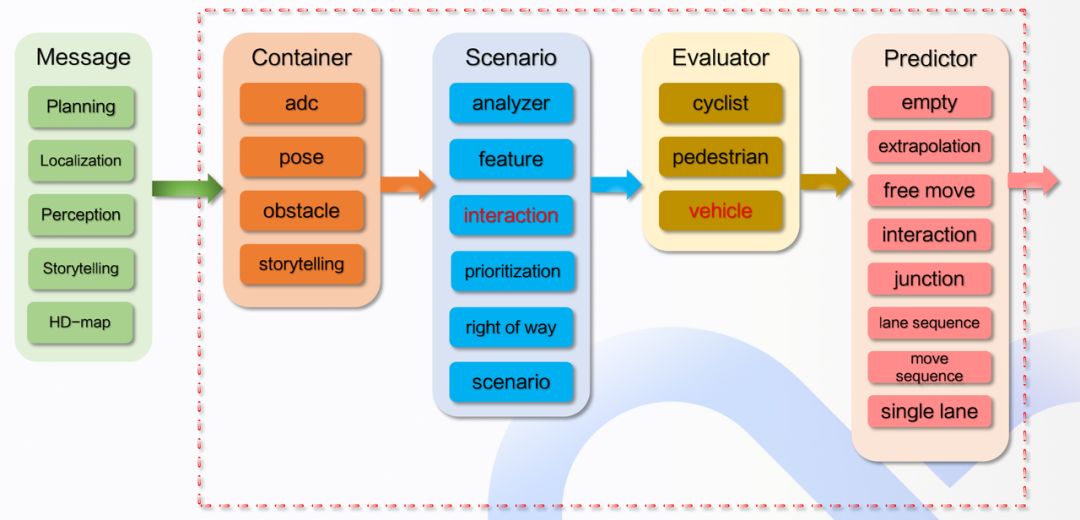
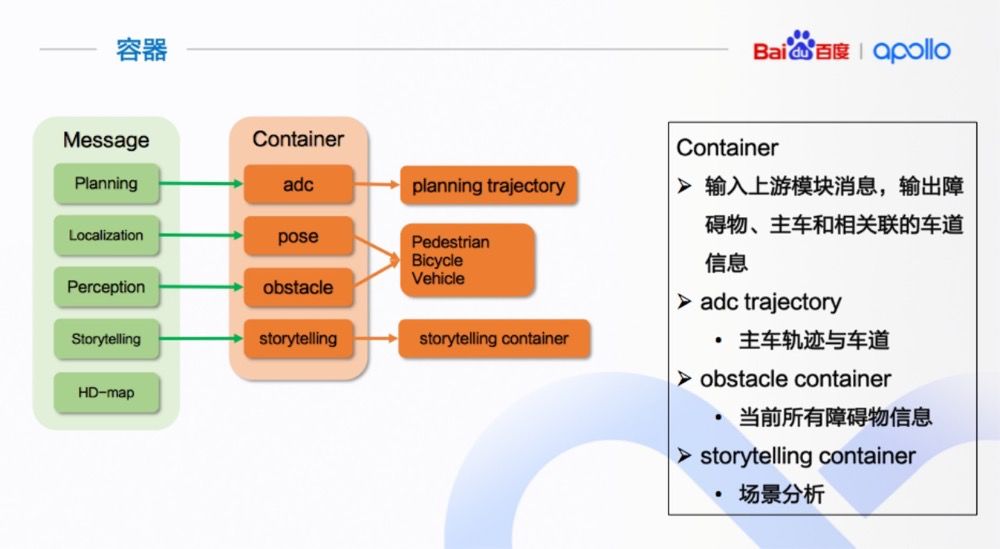
容器 Container
输入上游的一系列信息,输出障碍物、主车和相关联车道信息。
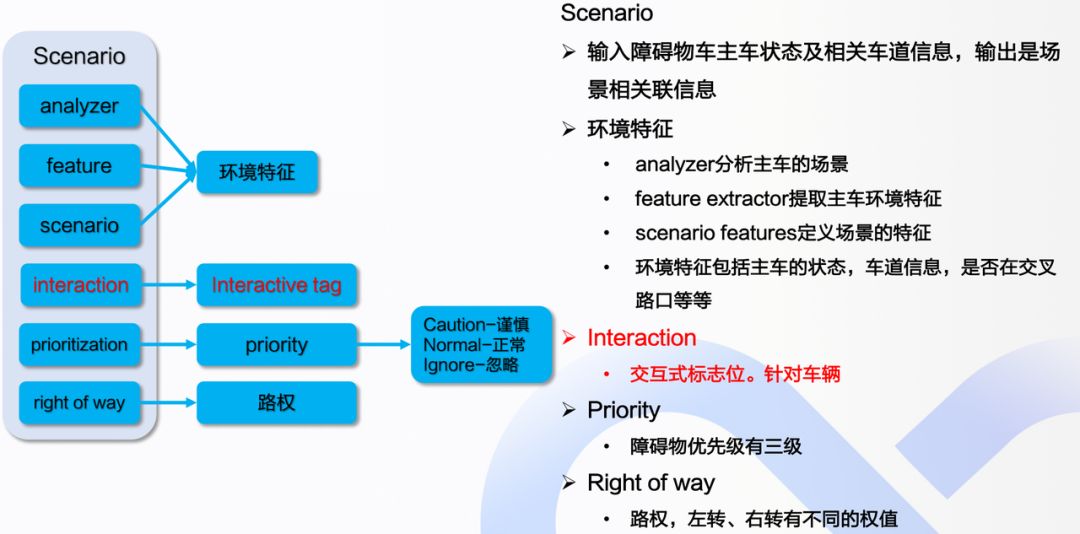
场景 Scenario
输入障碍物车状态、主车状态及相关车道信息,输出场景相关联信息。其中interaction(交互标志位)是7.0中新增加的一部分。
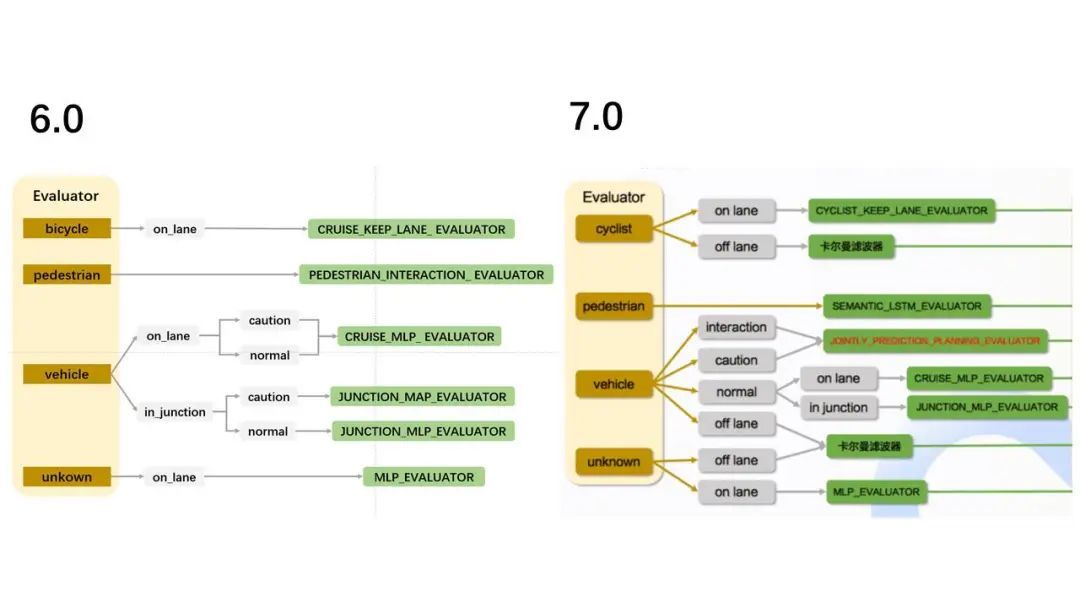
6.0和7.0的区别
6.0 的思想是将车辆及人过去的状态和位置作为输入,放在神经网络中,得到一个未来的预测,实际上还是拟合函数的核心思想。
7.0中会先根据障碍车的位置判断是不是交互式的车辆(危险等级为ineraction及caution),然后针对交互式的车辆用交互式模型。
如果是其他类型的车辆(normal),使用巡航MLP评估器及路口MLP评估器,对于不在道路上的,使用卡尔曼滤波器。所以因此7.0更加细分了感知障碍物的类别判断,新增的一类使感知预测更加细致,提升点在于有针对性,预测效果也更好。
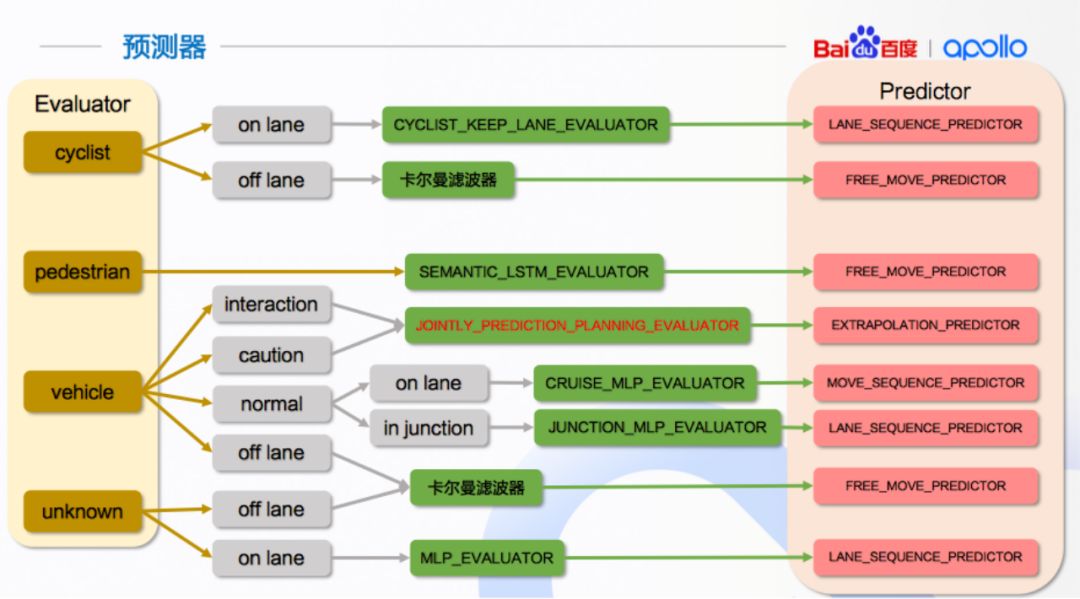
评估器 Evaluator
输入障碍物的信息及场景信息,评估器为机器学习的模型,输出障碍物的轨迹或意图,其中障碍物意图是指障碍物在每个车道序列的概率。
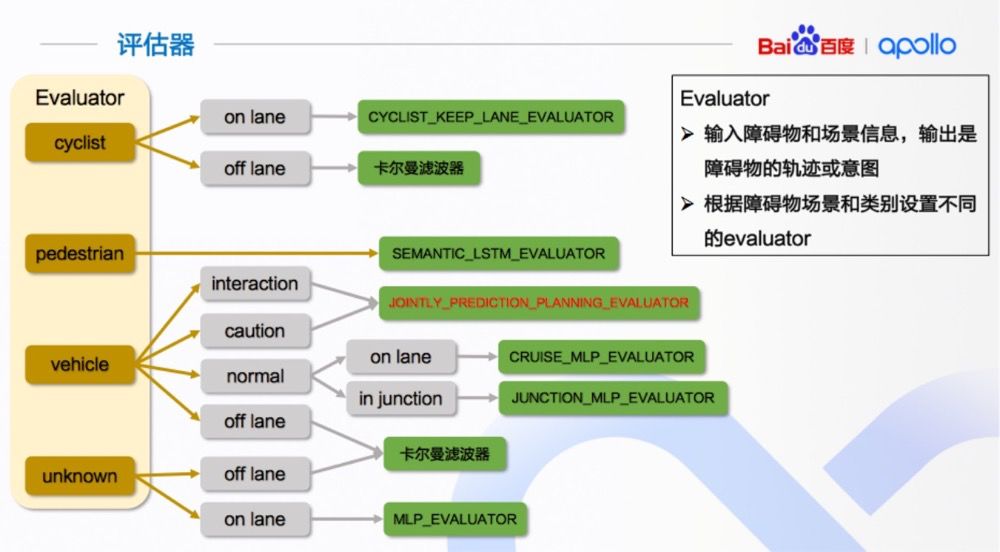
障碍物主要分为四类:自行车、行人、车辆、未知障碍物(感知模块中未检测出的)。
在预测模块中,不同的障碍物类型对应不同的评估器和预测器。
关于不同评估器的介绍,可参考:王方浩:apollo预测模块分享(二十一)
知识点:障碍物
感知侧输入的障碍物分为静态障碍物和动态障碍物,只有动态障碍物会进入预测模块,静态障碍物不做处理,打包后输出至规划侧。
这部分中Apollo6.0和7.0的结构区别
车辆(vehicle)部分中,Apollo6.0版本先将其分为onlane和injunction,再按caution和normal然后去做划分。而Apollo7.0版本直接做等级的预分,只在normal的情况下做 onlane和injunction 的划分。
此外7.0版本中多了interaction的等级,其和caution均指向JOINTLY_PREDICTION_PLANNING_EVALUATOR。6.0版本中的onlane情况下的caution 和 normal 均指CRUISE_MLP_ EVALUATOR。
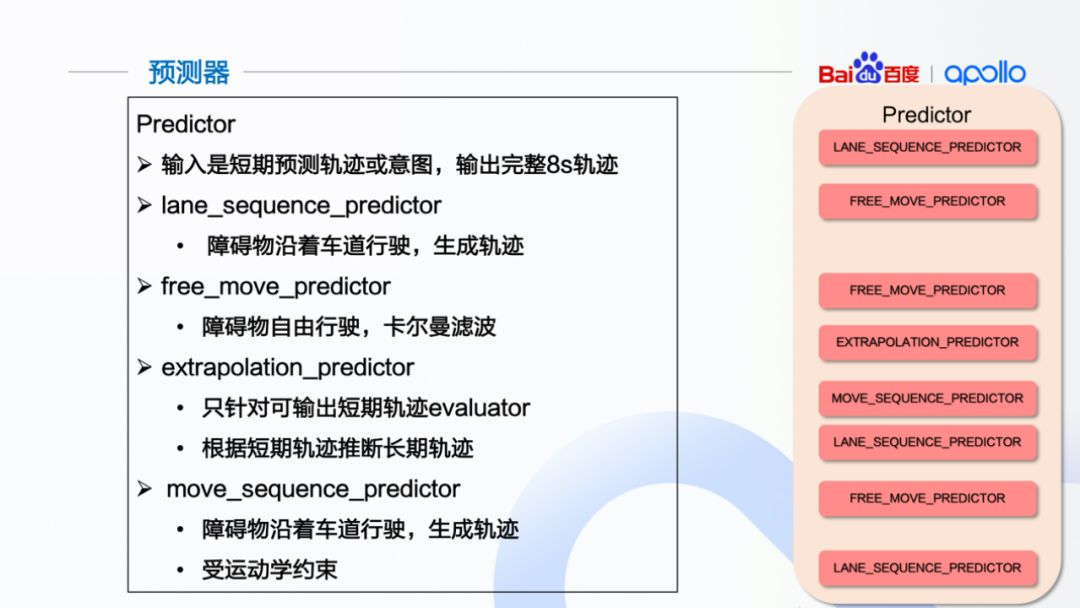
预测器 Predictor
预测器是在Evaluator获取预测轨迹或意图后,进行轨迹的延伸或者生成,处理完后最终生成8秒的轨迹。
预测器分类如下所示:
环境信息编码
为什么要编码?
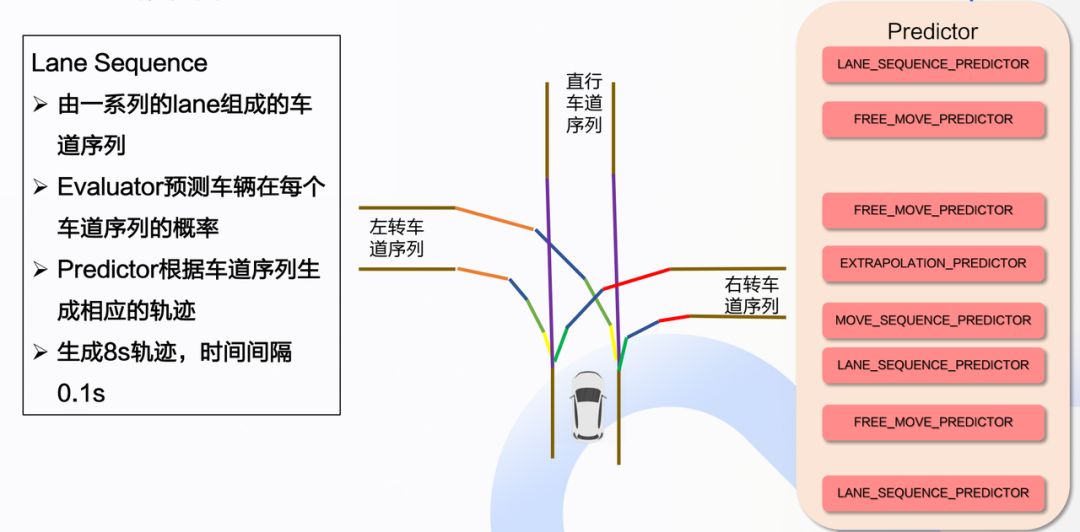
最初对障碍车辆的预测,只是依赖于障碍车自身的运动状态,但障碍车的运动状态与当下所处环境是密不可分的。例如,当下障碍车在一个路口的右转车道上,可以判定其基本上要右转,如果在直行车道上,则很可能直行。
编码的作用是把道路之类的信息以形成特征的方式保存,以此决定障碍车的预测轨迹。
此外,当主车ADC的planning轨迹有可能和障碍车辆产生交互时,例如主车需要变道、加塞时,也会对周边车辆产生影响,因此编码流中也会包含主车轨迹。
如何编码?
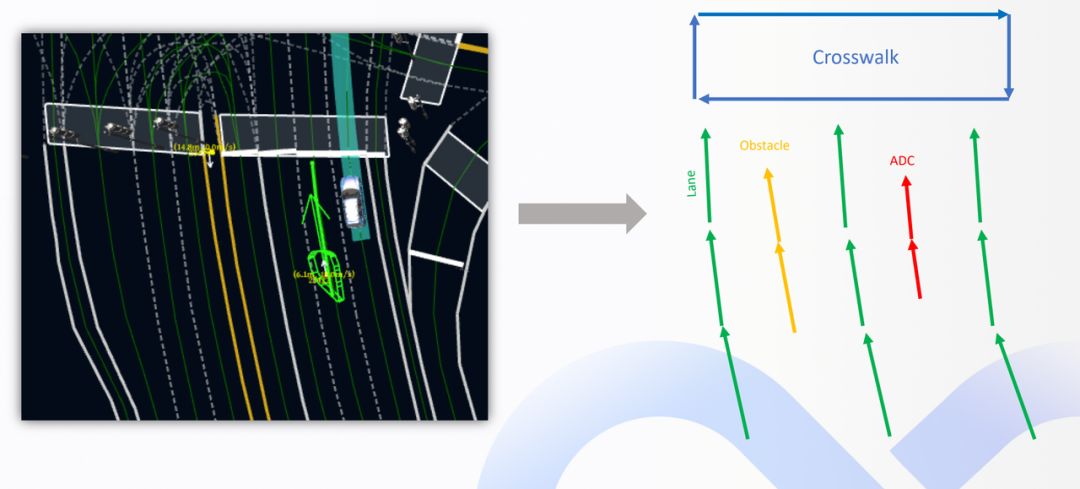
在Apollo7.0的设计中,如下图所示,蓝色的表示人行道,四个向量的四条边均是有效的,连接后用以表示人行道;道路边缘是指polyline(下图中的多线段),也是以向量的方式形成;障碍物(obstacle)轨迹和自车 ADC 轨迹同理。
用这种方式,可以将左边的仿真图变成了右边编码后的图。
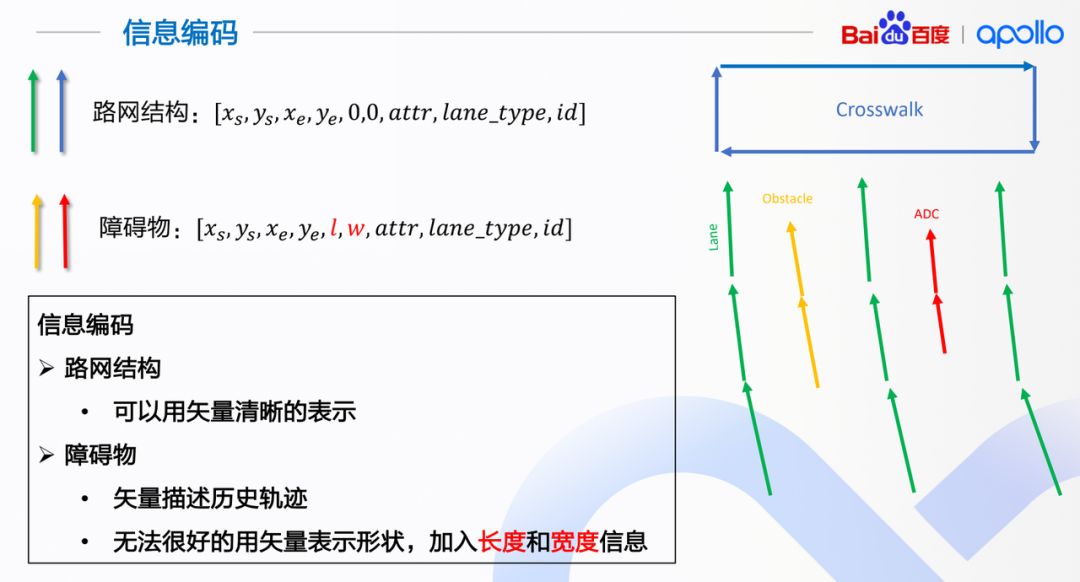
具体的结构化数据存储信息编码过程如下:
其中,Xs,Ys为起始点的横纵坐标,Xe,Ye 为结束点的横纵坐标, attr是需要额外放置的属性,lane_type 是判断线端是什么类型,虚线or实线,双黄线or单黄线,id是指每条路的标识。
障碍物中的l,w,对应路网的 0,0,是指障碍物的长和宽。
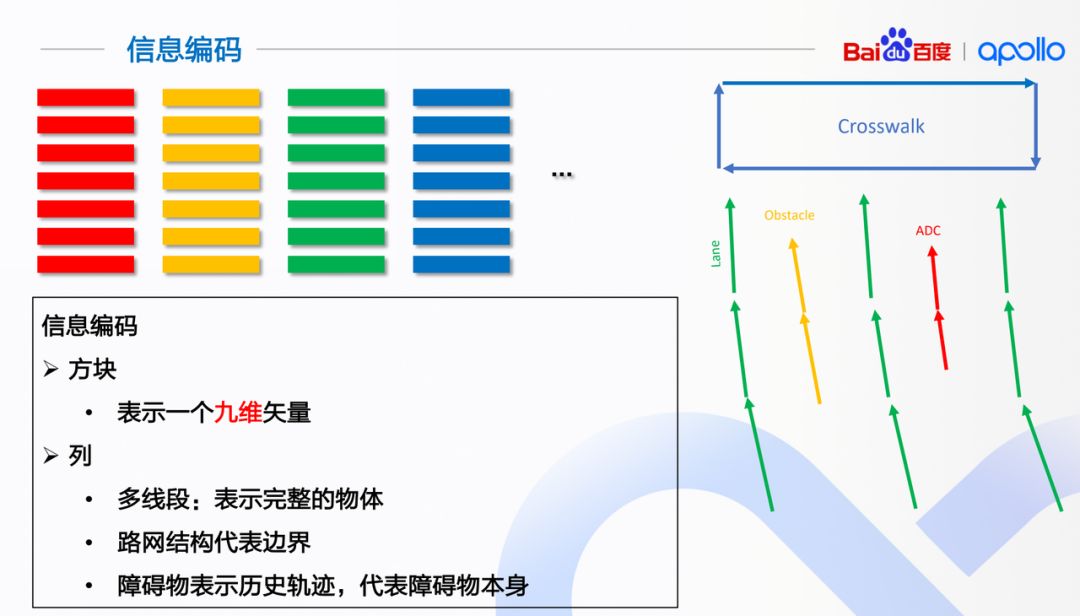
信息编码完成之后,我们可以将其抽象的理解成这幅彩虹图,每个图都是由多个矢量组成的,不同颜色的方块都表示不同的九维矢量(红色为主车轨迹,黄色为障碍物轨迹,绿色为道路,蓝色为人行道)。每一列可以描述为多线段,也就是多矢量的一个线段,它表示是一个完整的物体。
编码后总体结构
编码后形成的不同颜色的色块。每一个色块其又由多种子元素构成。例如绿色(表示道路)由三段构成,轨迹则被分为两段。
之后需要做的事情有:
1.形成子图
2.全局图的交互
3.输出最终的语义地图
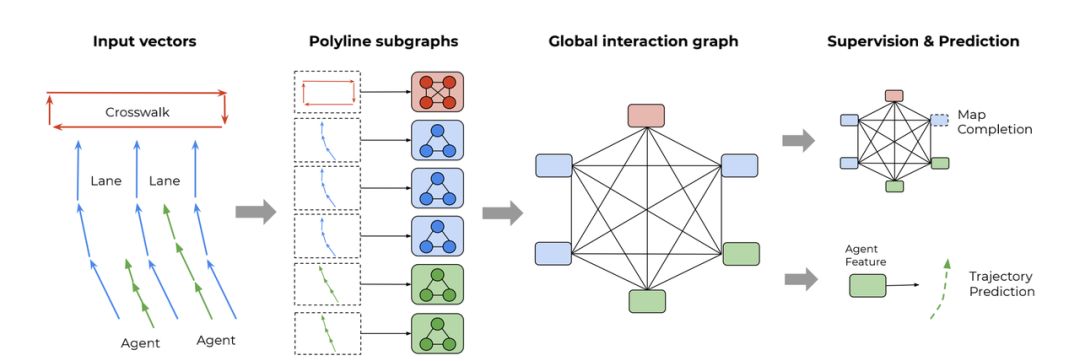
1.子图
子图:每一个向量特征进行处理
在子图阶段会每一个元素进行一次全连接,让每个元素之间产生联系。例如,其将红色人行道(crosswalk)的每一条边全连接在一起,lane和轨迹也是如此。
子图的网络架构具体如下:
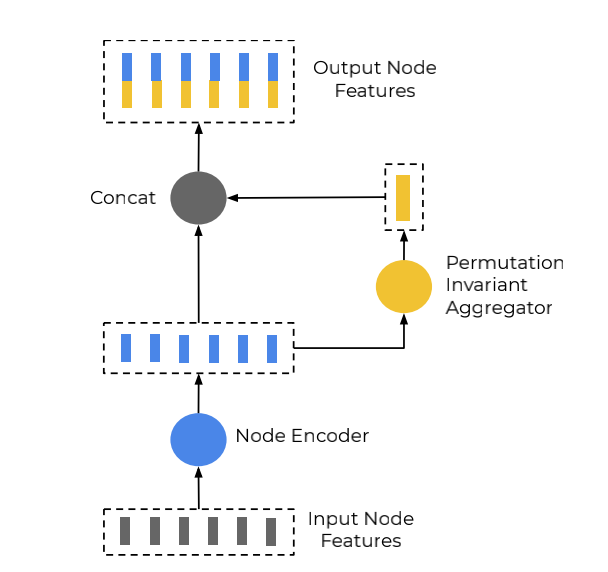
原文公式:

翻译为人话的公式:

Node Encoder 这里用的是MLP,就是全连接的一个网络结构,将数据相关联并提升到高维空间。
Permutatation Invariant Aggregator 使用的是Max Pooling,最大值池化。
对Max Pooling的更深入了解可参考:对Max Pooling的理解_117瓶果粒橙的博客-CSDN博客_maxpooling
这里在VectorNet中,在MLP上包裹了一层GCN,从而使有连接关系的节点(每一条轨迹都由带有前后指向关系的节点组成)能够进行特征层面的传播。
Apollo这里单纯采用了MLP,我们猜测可能会在特征层损失一部分向量信息(节点与节点的连接关系)。
但当下核心的问题是,当我们考虑部署的情况时,我们需要将我们的模型使用TorchScript的jit方法导出成一个中间状态,才可以以ONNX的形式或在C++平台上部署。GCN当前对TorchScript的导出还不友好,比如GCN通常采用torch_gemotric.data 来进行数据输入,而如果想通过TorchScript进行导出,则只支持tensor的形式;以及在某些算子层,TorchScript也不直接支持GCN的导出。因此单独使用MLP反而是一个更加朴适的方法,这是我们对这一个部分的理解。
在下一篇文章中,我们则会全面展开着在GCN部署时遇到的问题,我们的优化历程,以及如何end-end考虑预测模块模型的设计与部署。
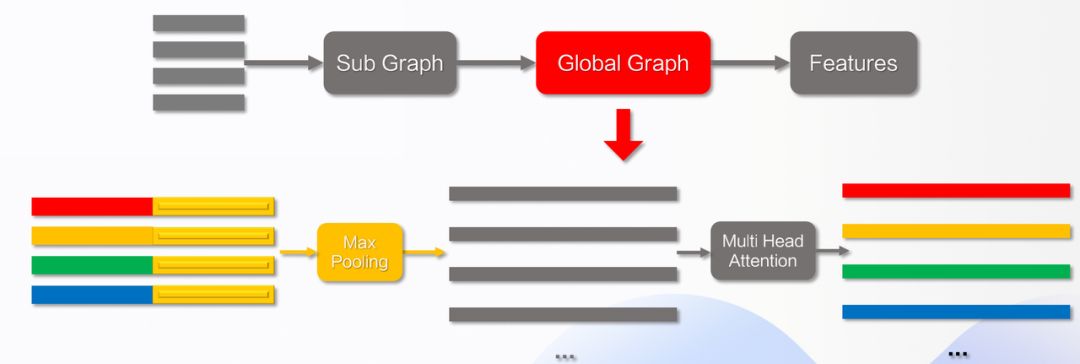
2.全局图
全局图:对所有的向量进行处理
这部分是对每个完整的物体做处理,这一部分会对所有的物体都会做一个交互。这里交互既包含了车辆,也包含了路网在内。
原文公式:

翻译为人话的公式:

MultiHeadattention的具体操作就是把Attention加在一起。Attention是指之前的特征(P)经过Q 矩阵,T K矩阵,V 矩阵,之后再做softmax合在一起。
说到这里大家有点晕,我们重新梳理一下:
基本意思是指第一层进来的东西,经过Max Pooling,再经过Self Attention 运算,就会输出整体的这个结果。
知识点:Attention 机制
对于一个图像而言,当对其进行预测,或是做类似YOLO的目标检测或图像分类,其特征是对于整张图而言的。但Attention机制下会采用某些权重比,让其对某一部分的区域产生兴趣,这部分会多学。例如照片中的某个位置有只狗,这个位置的权重相对会高一点。
Apollo这里用的是 self Attention,核心思想是使全局图的元素产生更多的交互,产生更多的兴趣点。
此处我们不再展开讲解Self-Attention, 想要补充相关知识的同学可以观看李宏毅老师的关于这一部分的教学片,非常详细也非常清楚。
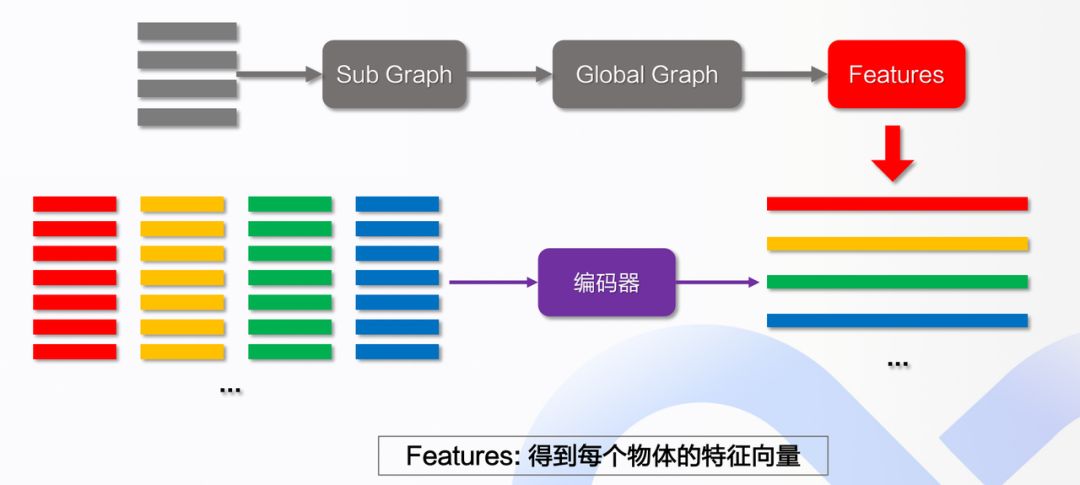
3.输出最终的语义地图
最后输出为每一个物体所对应的特征向量,然后取出需要的特征向量进入下一步处理流程。
轨迹生成器
《VectorNet: Encoding HD Maps and Agent Dynamics from Vectorized Representation》这篇论文原文在经过编码后,直接使用了比较通用的方法作为解码器,生成目标预测的轨迹点。
而Apollo7.0中经过编码后,使用类似于TNT (Target-driveN Trajectory Prediction)思想的方式进行轨迹预测。
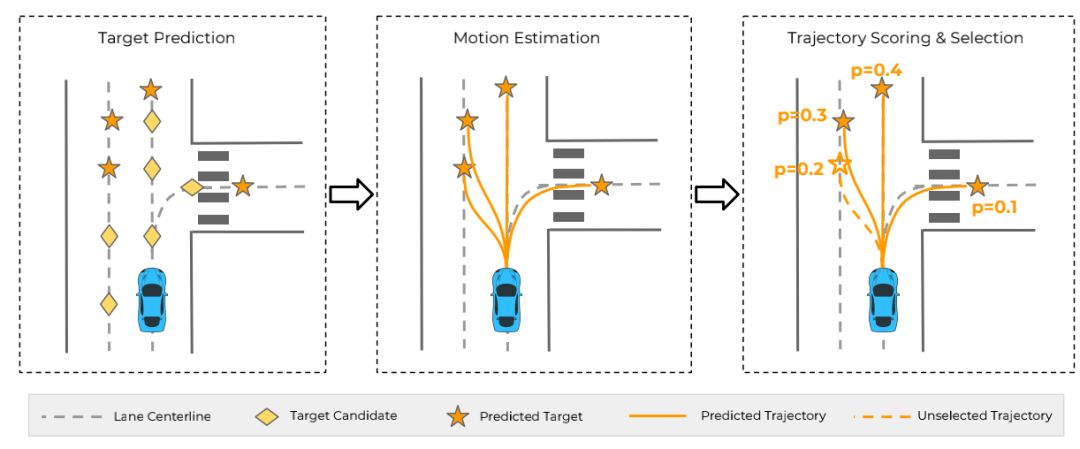
总体结构如图:
在实际道路上采一些样点,我们称其为候选点(图中的菱形样点),根据候选点,预测可能会到达的选中点(图中所示的星点),最后由可到达的选中点,决定可能会生成何种轨迹。
总结而言,就是从一堆点中学习出一些真正可能去到的选中点,再学习出从当前位置到选中点的轨迹。
预测任务分为三步:
1.给定环境的context,估计每个候选点的可能性,从而选择概率高的候选点,下图分别用钻石和星星表示候选点和选中点
2.根据目标,估计每个选定目标的轨迹(分布)
3.对所有的轨迹进行排名的评分和选择
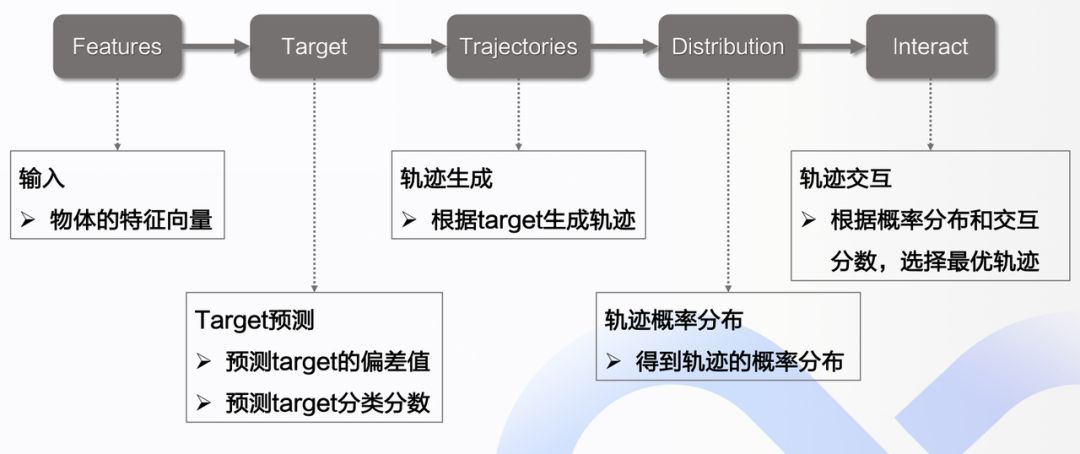
Target -> 轨迹 -> 轨迹概率分布 -> 轨迹交互
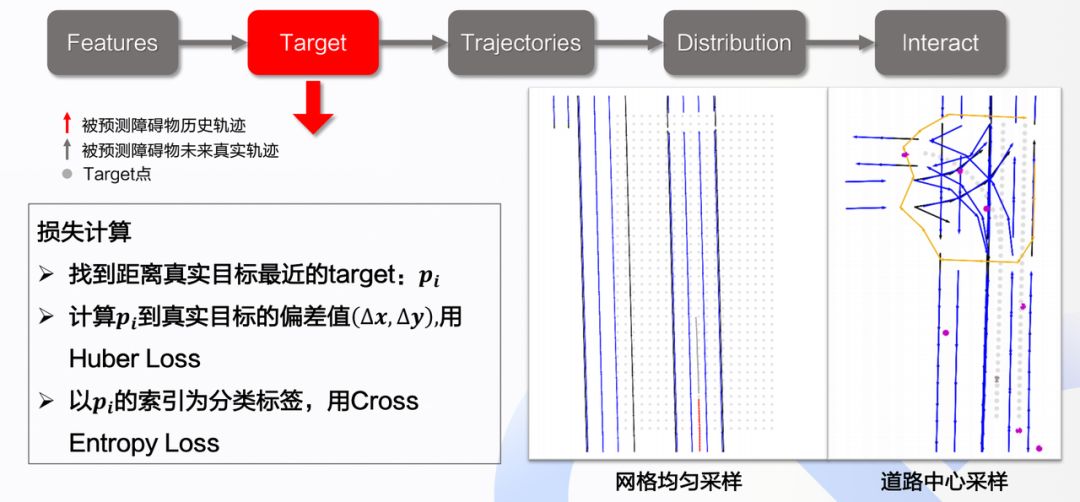
Target
假设过去的状态:

预测未来的状态:

Cp 代表着此时的背景(环境)
用真实的Target拼接特征向量来生成预测的轨迹,用生成的轨迹和真实轨迹做一个Huber loss。
使用X=(Sp,Cp)表示所有的过去状态,就是要尝试估计 p(sF |x):给定过去状态未来状态的边缘概率。

这里的核心思想是,通过设计目标空间τ(Cp) (候选点位置), 候选点分布p(τ|x)可以很好地捕捉意图不确定性。一旦确定了目标,进一步证明了控制不确定性(轨迹)可以通过简单的单峰分布可靠地建模。通过一组离散位置来近似目标空间τ(Cp),将p(τ |x)的估计转化为一个分类任务。



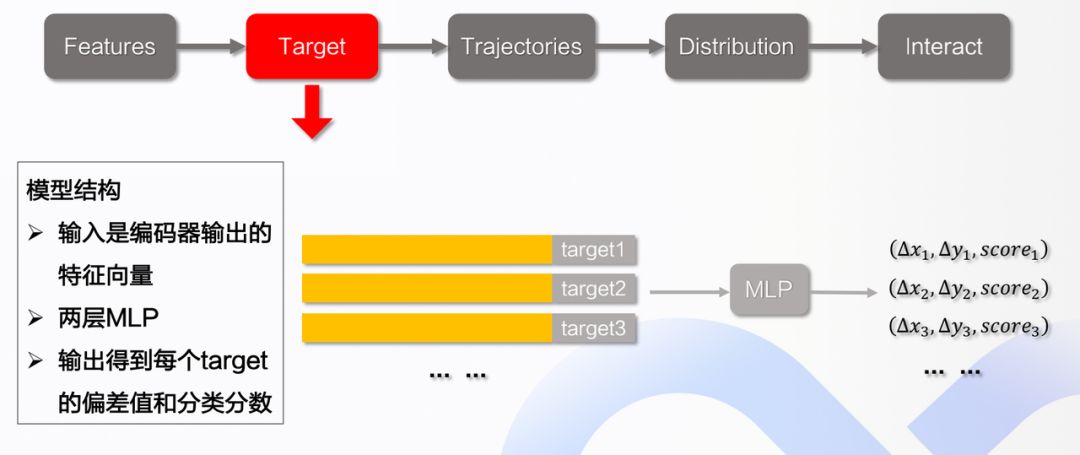
在以上的公式中,N 表示广义的正态分布,Huber作为距离函数,平均值表示为v。可训练功能 f和v由两层多层感知器(MLP)实现,目标坐标和场景上下文特征作为输入。他们预测目标位置上的离散分布及其最可能的偏移量。
Softmax!最终核心:分类问题,每个候选点到底哪个属于哪一个选中点(星点)。

Loss:Lcls是交叉熵,Loffset是HuberLoss,u是预测选中点离最近的真值选中点的距离。
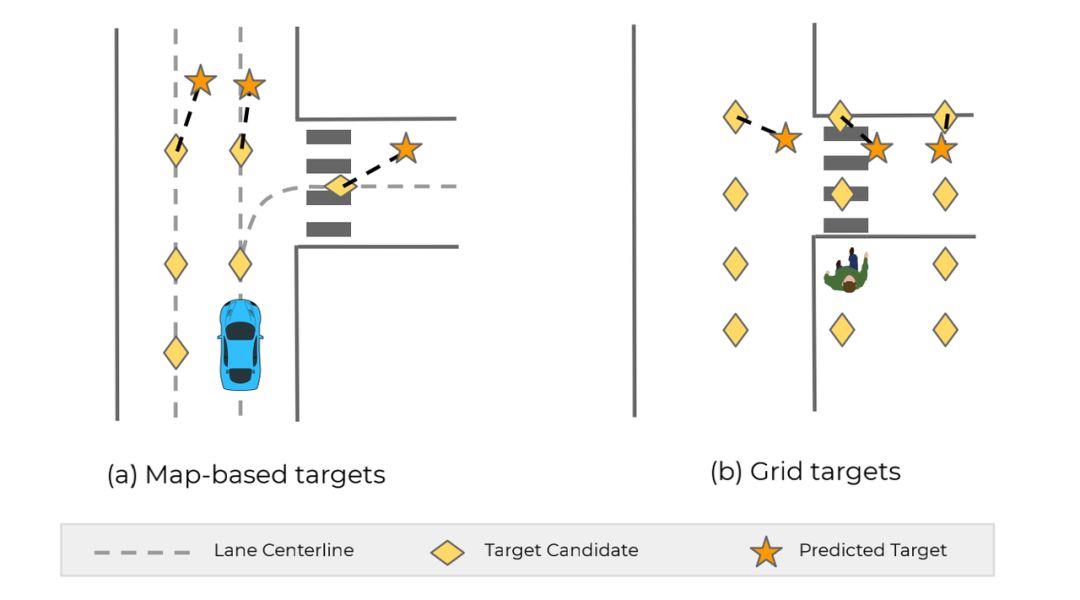
Apollo7.0目前使用的是道路中心采样方式,使用其来预测车辆的轨迹。
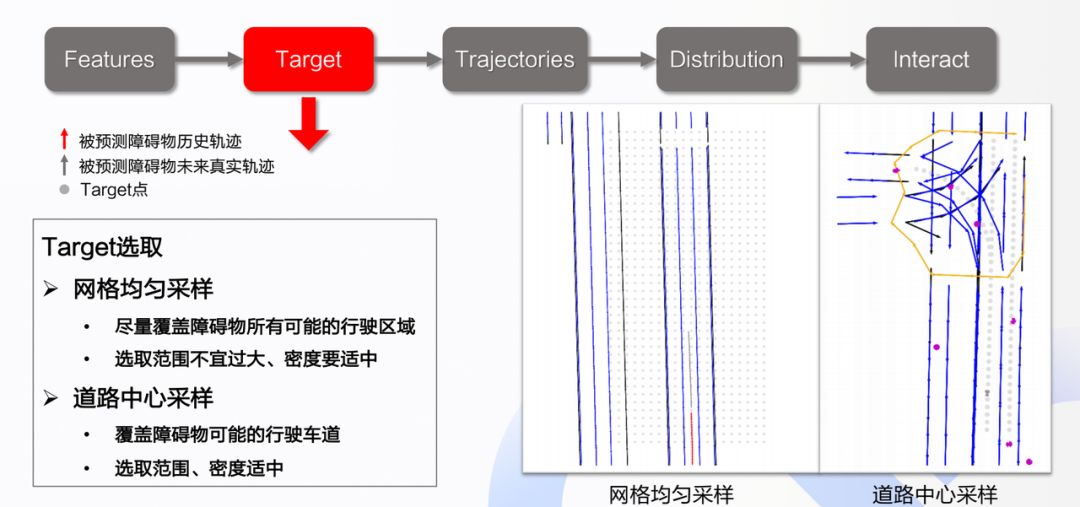
Apollo7.0对于Target点的计算方式相同,不多赘述。
Trajectories
上一步得到选中点之后,接下来就是根据选中点生成相应的轨迹。
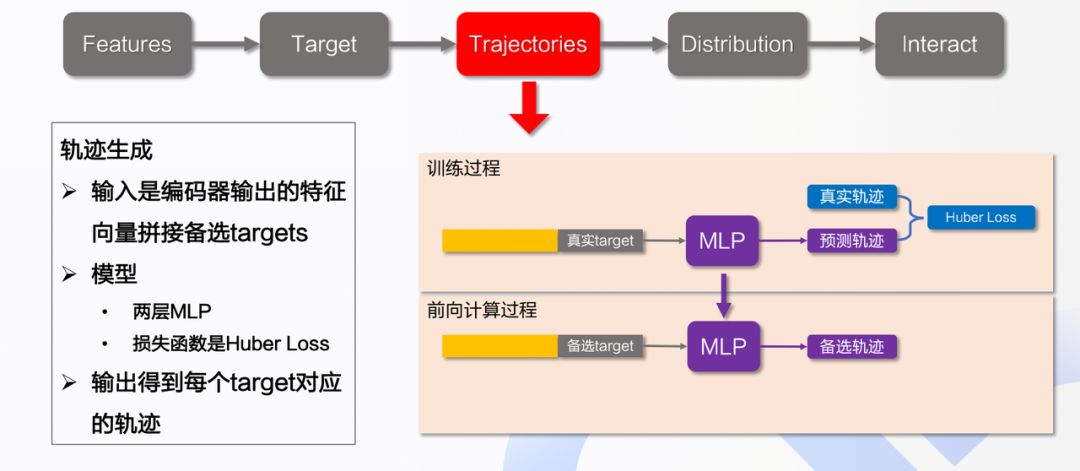
(TNT)原论文中的公式如下
这里存在两个假设:时间步长是条件独立的,也就是时间上步与步的预测是独立的,可以使模型避免了顺序预测,提高了计算效率;对一个选中点只有一条最大概率的Trajectory,这样的轨迹分布为正态单峰分布的,这在短期内肯定是正确的;对于较长的时间范围,可以在(中间)目标预测和运动估计之间进行迭代,这样假设仍然成立。
总而言之,通过两层的MLP来预测每一个Target的轨迹SF,它将上下文特征X和目标位置τ作为输入,并为每个目标输出一条最可能的未来轨迹。由于它是以第一阶段的预测目标为条件的,为了使学习过程顺利进行,训练时通过输入位置真值作为目标
损失函数则是预测轨迹与真实轨迹的差值,这么做期望达到生成轨迹最后一个点,跟Target的点尽可能的重合。
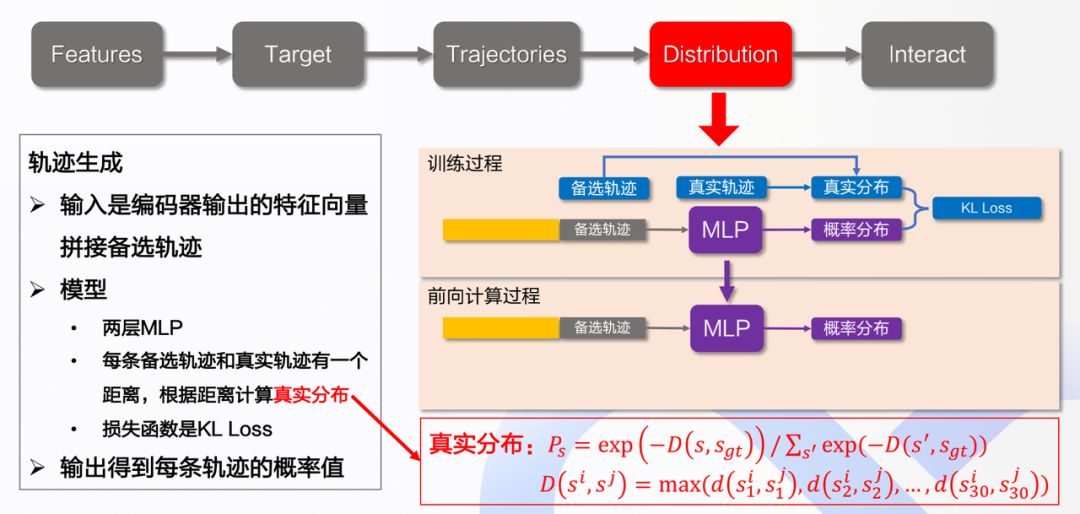
Distribution
这一部分在原论文中没有提及,属于Apollo7.0版本的新增部分。
根据轨迹去计算轨迹的一个概率分布,真实分布(计算公式见下图)是指被选轨迹距离真实轨迹越近时,它的概率越高。前向计算前向计算就是计算备选轨迹的概率分布。
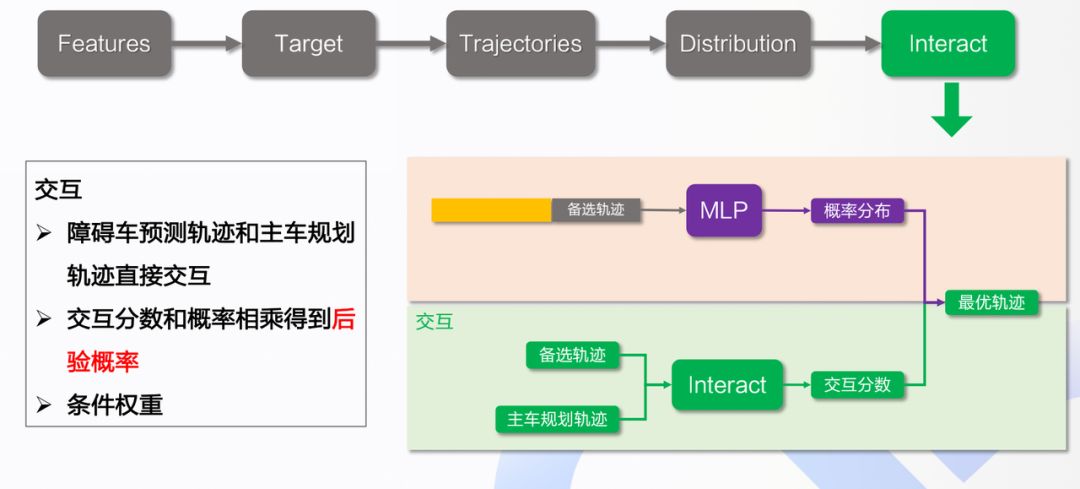
Interaction
这一部分也是Apollo7.0中新增的重要部分。
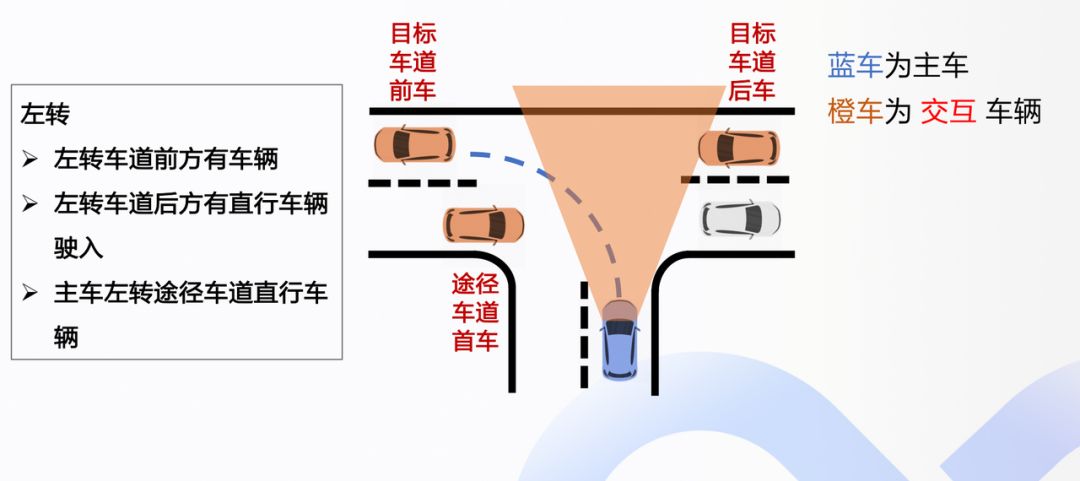
前文所述考虑了障碍车预测轨迹和环境的影响,但还需要与主车规划轨迹进行交互打分,去选择最优轨迹。例如交互前该障碍车预测轨迹为0.8 分,和主车的轨迹交互后可能不再是 0.8 分,可能会重新打分。
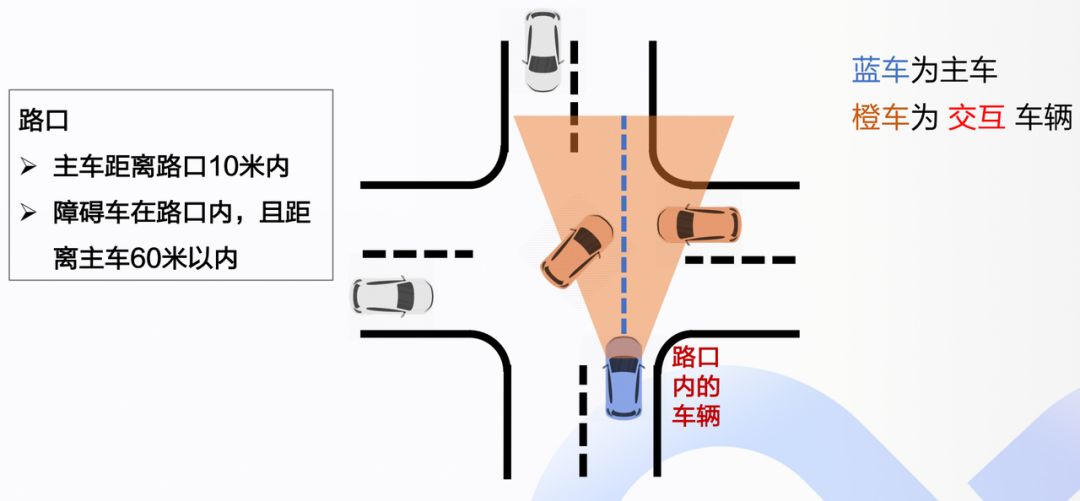
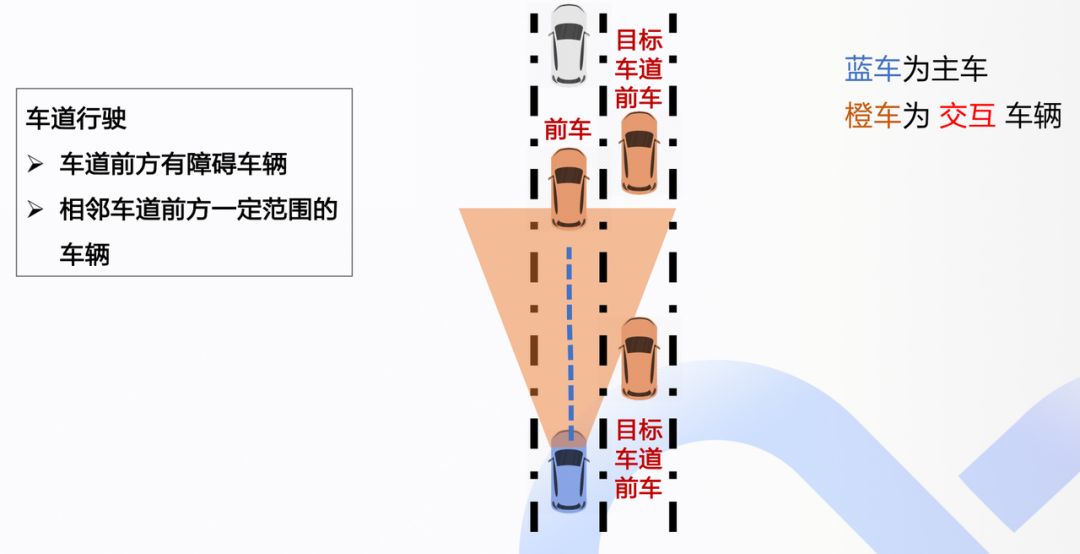
交互情况
以下四张图为不同情况下(路口、车道行驶、换道、左转)可判断为交互车辆的情况。

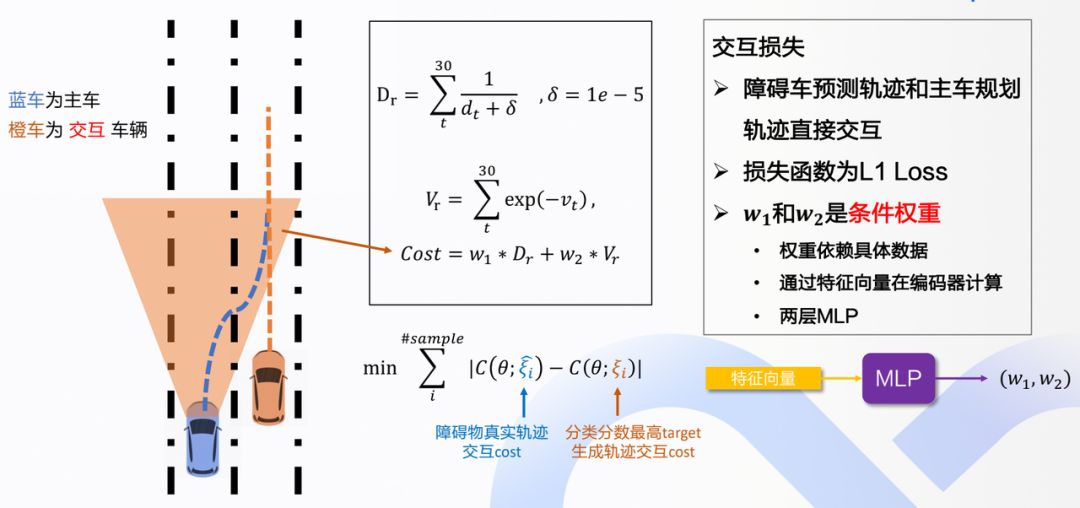
交互分数计算
假如说50条备选轨迹,就会有50条交互分数(用cost表示)。是指交互的严重程度,如果cost较大,说明危险程度较大,会削弱对该条预测轨迹的发生概率。
预测轨迹与规划轨迹之间的时间对齐。预测未来3s,时间间隔0.1s, 共有30个选中点。
30个选中点之间的相对距离(D)累加,30个点的相对速度(V)累加起来,两项经过两个条件权重(W1和 W2)进行加权,之后相加得到交互分数cost。如果距离越近,那么cost越大;如果速度差距越大,那么cost也越大。
Tips:W1和 W2这两项条件权重是通过编码器的特征向量,经过MLP实现的。
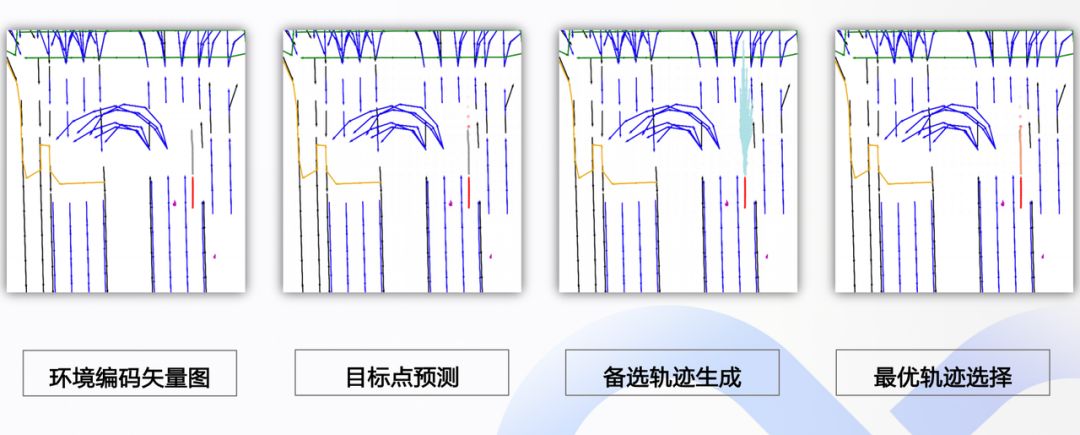
预测效果演示
第一张图为最原始的环境编码后的矢量图。
第二张图为选中点预测结果(即上文所述的星点)。
第三张图是备选轨迹生成,根据每个选中点的位置生成了相应的轨迹。
第四张图是最优轨迹的选择,通过本身的轨迹预测分数和主车轨迹的交互分数,得到一个最优轨迹。
测评指标
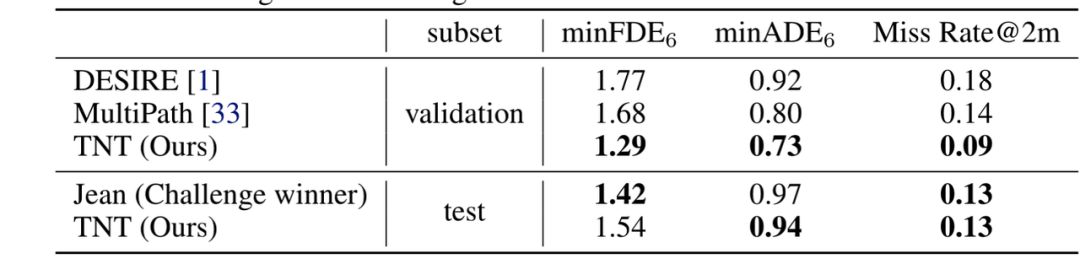
为衡量预测效果的好坏,(TNT)论文使用的是MR、MinFDE、MinFDE和DAC几个指标来进行衡量。
MR (Miss Rate,缺失率) ,描述检测结果中的漏检率的指标。
minFDE( Minimum Final Displacement Error , 最小最终距离误差),对于 N 个预测轨迹,选择最终轨迹预测点与真值预测误差最小的作为评估结果
minADE( Minimum Average Displacement Error,最小平均距离误差 ),对于 N 个预测轨迹,选择平均轨迹预测点与真值预测误差最小的作为评估结果。
MinFDE只能评估最好的估计有多好,但不能评估所有轨迹的优劣。
因此提出新的标准DAC(Drivable Area Compliance ,最小最终距离误差)。如果模型产生n个可能的未来轨迹,并且其中m个轨迹在某个点离开可移动区域,则该模型的DAC为(n m)/ n。因此,较高的DAC意味着更好的预测轨迹质量。
如果存在n个样本,并且其中m个具有其最佳轨迹的最后一个坐标距离地面真值超过2.0 m,则未命中率为m / n。
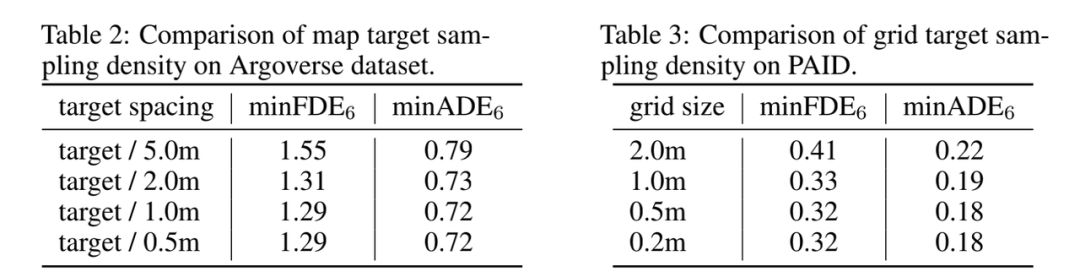
表2及表3分别为在地图采样时样点取点距离的效果对比,表2为车辆检测中取样的效果,可以看出每1m取一个样点可性价比最优。表3为行人检测中的取样效果,可以看出每0.5m取一个样点可性价比最优。
从下图的检测结果的测评指标来看,TNT的效果较好。
当前Apollo 7.0的轨迹预测由于有许多工程化方法,尚未提供量化分析其性能的方法或指标。我们可以通过剥离其代码,使用到传统轨迹预测的评测指标上来。但不可否认的是,由于TNT本身方法在之前轨迹预测中表现较好,且其改进版本DenseTNT也拿到了相关比赛的第一名,我们认为该方法对于准确性是有依托的。
结语
对Apollo7.0的预测模块及所涉及技术进行探讨分享全文结束
码字不易,更新虽慢,但每篇都是用心之作。希望可以帮到屏幕前正在阅读的你,也欢迎多多转发,分享,讨论~
再次声明:文章图片来自Apollo7.0技术分享课内容及相关论文。参考文献附于文末。
参考文献
Gao J , Sun C , Zhao H , et al. VectorNet: Encoding HD Maps and Agent Dynamics from Vectorized Representation[J]. 2020.
Zhao H , Gao J , Lan T , et al. TNT: Target-driveN Trajectory Prediction[J]. 2020.
-----本文首发于公众号i车Gear联,转载需标明出处
推荐阅读:文章收录于《自动驾驶Apollo实践》专栏下,如想要系统完整的进行学习,欢迎关注专栏,持续更新ing

参考链接
1.一文详解Apollo7.0 预测模块及相关技术 - 知乎
最后
以上就是落寞世界最近收集整理的关于一文详解Apollo7.0 预测模块及相关技术的全部内容,更多相关一文详解Apollo7.0内容请搜索靠谱客的其他文章。








发表评论 取消回复