近年来,自动驾驶受到越来越多的关注,当前各大厂商的技术基本上集中在L2-L4级别。
为了实现这些功能,感知系统一般会融合多种传感器的冗余数据,综合计算出周围的环境信息,提供给给控制系统。
常见的车载传感器包括:毫米波雷达、视觉摄像头、激光雷达、GPS、IMU等。
视觉摄像头作为其中一个很重要的传感器,应用在几乎所有的自动驾驶功能当中。
例如特斯拉的自动驾驶系统FSD就搭配了8颗8百万像素(8MP)的摄像头,蔚来和小鹏等厂商,也配置了10颗以上的8百万像素摄像头。
通常根据摄像头的安装位置,把车载摄像头分为前视、后视、环视、侧视以及舱内。
如表1所示,不同的安装位置,所起的作用和功能不同,这些功能分为:
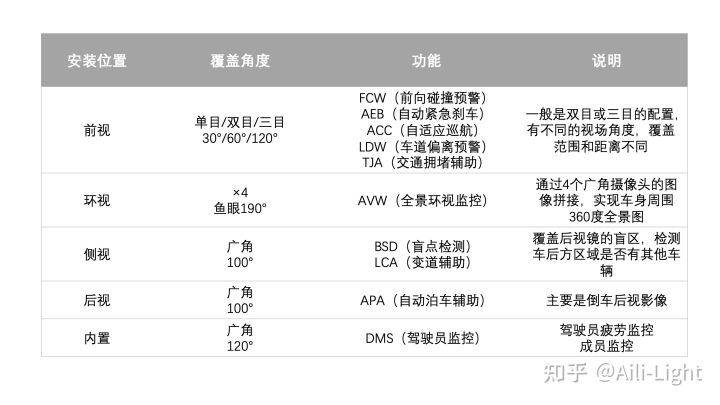
表1: 车载摄像头的分类和功能
自动驾驶对功能的定义并没有统一的标准,各家厂商定义了不同的功能和覆盖的场景,例如奥迪A8所定义的自动驾驶场景是: 在高速或有隔离带的多车道道路,堵车场景下(60km/h以下)开启的拥堵辅助(TJP,Traffic Jam Pilot)功能。
又如广汽新能源埃安LX的自动驾驶场景是: 高精地图全路段的全速域自动驾驶,即在高精地图覆盖的中国高速及城市快速路,实现0-120km/h全速域脱手、脱脚自动驾驶。
因此,为了实现不同的功能,视觉摄像头需要满足不同的要求。例如在高速公路行驶的场景下,车速可达到120km/h,自动驾驶系统需要摄像头能看清200m之外的物体,才能让系统有足够的反应时间。理论上,越高的车速,需要的检测距离就会越远,检测的角度越小。
然而在城市低速场景下,又需要摄像头能够覆盖驾驶员的盲区,有较大的视野范围。
那么我们如何根据功能需求,选择合适的视觉摄像头配置呢?

表2:常见的车规感光芯片的像素和靶面尺寸(单位为英寸)
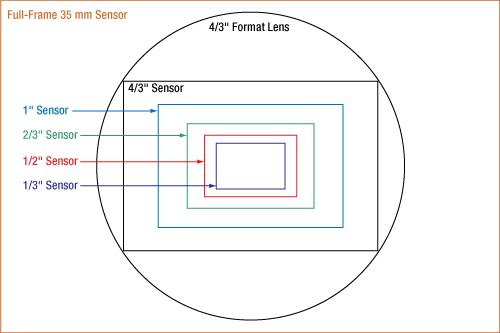
图2:感光芯片的靶面尺寸示意图,越大的靶面尺寸表示进光量越多,一般车载CMOS的靶面尺寸1/3.5’’到1/1.7’’
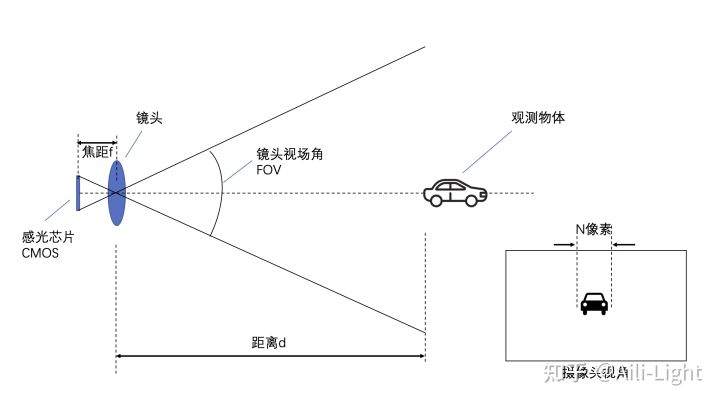
镜头的视场角决定了每个像素能感知到的物体大小,例如2百万像素、靶面尺寸为1/2.6’’、FOV60°的摄像头,在110m远处,每个像素对应的大小约是6.5cm 。如果一辆小汽车的尺寸是1.6m×1.6m,它在图像中就会占据24×24个像素。一般情况下,假设镜头符合小孔成像模型,可以近似地认为像素数量M和物体尺寸h的关系为:
M=(h/d)*(f/p)
其中d是物体的距离,f是焦距,p是单个像素的大小,其几何关系如图3所示。
大部分的自动驾驶算法采用了卷积神经网络来识别物体,如果物体占据的像素点过少,则会被算法过滤掉,当做噪声处理。
为了达到识别的效果,通常认为至少需要24个以上的像素来做判断,因此我们可以定义物体最小可分辨像素数为24,由此得出不同大小的物体,摄像头能观测到的最远距离。
综合以上,我们给出一些常见的自动驾驶场景下的推荐配置。
配置1:L3无人驾驶的全向布局
前视由三目组成,分别是1颗2百万像素(2M)FOV30°(远距离)
1颗2百万像素FOV60°(中距离)和5百万像素(5M)FOV130°(短距离)
侧视由2颗2百万像素FOV100°构成
侧后视补盲也是2颗2百万像素FOV100°构成
后视由1颗2百万像素FOV100°构成
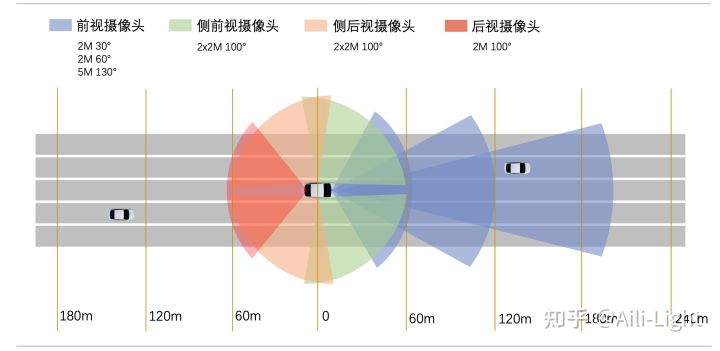
图4:L3无人驾驶视觉方案推荐
表3列举了道路上常见的物体,针对不同物体的尺寸,计算了摄像头可以检测的距离。
例如前视摄像头(2MP,FOV30°),具备50m-200m的探测能力,而广角摄像头(5MP,130°),具备10m-50m的探测能力。
配置1覆盖了从近至远(10m-200m),FOV从小到大(30°-130°)的各种组合范围,可检测的物体小至雪花桶,大至卡车,因此是一个较为完善的L4视觉解决方案。
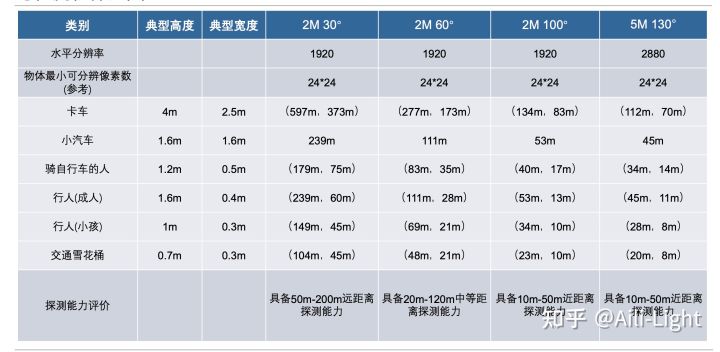
表3:L3无人驾驶视觉方案的物体检测距离
配置2:L4高级别自动驾驶方案/图像数据采集车
此方案全部由8百万像素(8M)的摄像头组成
前视是三目(一对FOV120°双目,加上一颗FOV30°)
环视由4颗FOV190°超广角构成
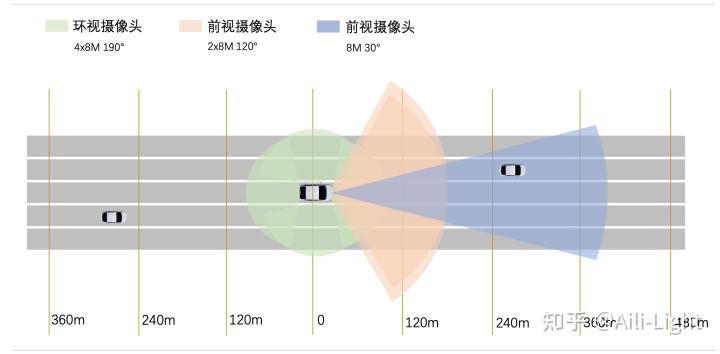
图5 L4无人驾驶视觉方案推荐
从表4可以看出,长焦镜头(FOV30°)的检测范围在90m-750m,具备远距离的探测能力,
而广角摄像头(FOV120°)也具备15m-120m中等距离探测能力,因此该方案适用于高级别(例如L4)自动驾驶。
另外当前车载摄像头的最高规格就是8百万像素,因此该方案也可以用于图像数据采集车的应用(可以降采样使用)。
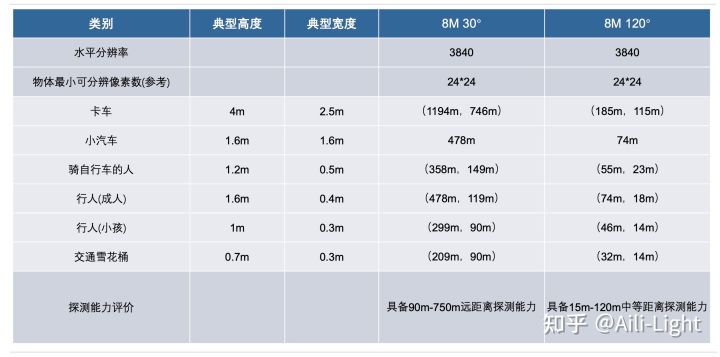
表4 L4无人驾驶视觉方案的物体检测距离
配置3:L2自动驾驶/机器人、物流车等低速场景
该方案的前视、后视各由1颗2百万像素(2M)FOV100°的摄像头构成,
环视由2颗1百万像素(1M)FOV187°的广角摄像头构成。
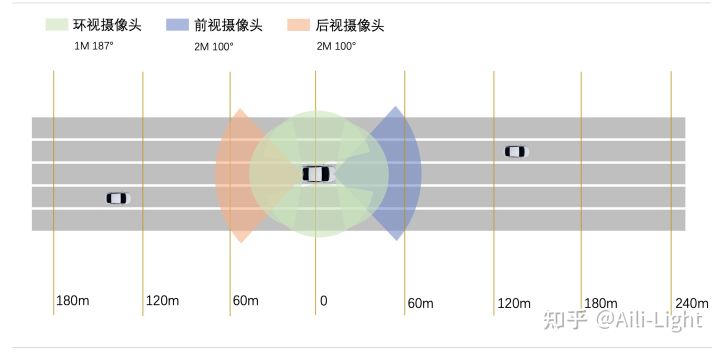
图6 L2自动驾驶/机器人、物流车等低速场景
从表5可看出,该方案能覆盖的检测距离在10m-50m之间,具备近距离的探测能力。
对于低速场景,由于该方案的构成相对简单,成本较低,是一个性价比较高的配置。
特别是对于机器人、无人物流车等应用,由于移动速度较慢,因此不需要很长的探测距离,但由于其场景复杂,因此需要较大的覆盖角度。
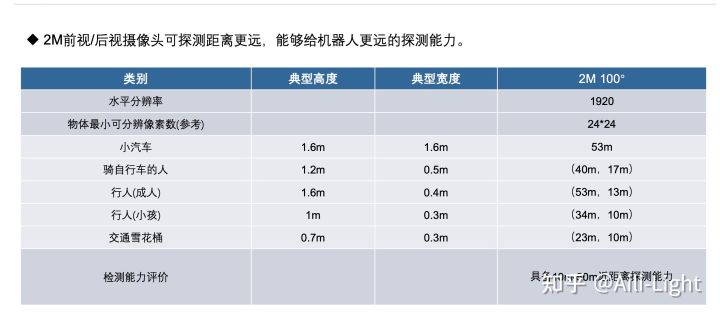
表5 L2自动驾驶/机器人、物流车等低速场景的物体检测距离
总结:
我们根据自动驾驶的不同级别和功能要求,给出了以上给出了几个参考配置方案,并且从机器视觉算法的角度,给出了摄像头所能识别的物体距离,供方案选择时作为参考。
最后
以上就是难过小笼包最近收集整理的关于L2-L4自动驾驶视觉方案推荐配置1:L3无人驾驶的全向布局配置2:L4高级别自动驾驶方案/图像数据采集车配置3:L2自动驾驶/机器人、物流车等低速场景总结:的全部内容,更多相关L2-L4自动驾驶视觉方案推荐配置1:L3无人驾驶内容请搜索靠谱客的其他文章。








发表评论 取消回复