无人驾驶技术与SLAM的契合点在哪里?
SLAM传统上还是面向室内等缺少GPS信号的应用,例如室内移动机器人导航,而在无人驾驶汽车上,它的意义和作用是什么,已经有高精度的地图和城市GPS信号了,那就是说SLAM只是为了感知么?
- 最初,SLAM的提出就是为了解决未知环境下移动机器人的定位和建图的问题。所以,笼统的说,SLAM对于无人驾驶的意义就是如何帮助车辆感知周围环境,更好的完成导航、避障、路径规划等高级任务。
- 现在已经有高精度的地图,暂且不去考虑这个地图的形式、存储规模和如何用它的问题。首先,这个构建好的地图真的能帮助无人驾驶完成避障或者路径规划等的类似任务吗?至少环境是动态的,道路哪里有一辆车,什么时候会出现一个行人,这些都是不确定的。所以从实时感知周围环境这个角度来讲,提前构建好的地图是不能解决这个问题的。
- 另外,GPS的定位方式是被动的、依赖信号源的,这一点使得其在一些特殊场景下是不可靠的,比如城市环境中GPS信号被遮挡,野外环境信号很弱,还有无人作战车辆作战中信号被干扰以及被监测等。
- 所以像视觉SLAM这种主动的并且无源的工作方式在上述场景中是有优势的。从硬件角度讲,目前主流的视觉SLAM方案,在构建低成本,小型化,易于搭载的硬件平台方面也是有优势的。
有什么理由能够让SLAM成为无人驾驶的关键技术?
- 1.我个人不是很赞同这个逻辑。SLAM作为一个很庞杂的系统,其本身也有很多关键环节和实际应用中会遇到的难题,作为一种应用场景越来越广泛的技术(如自动机器人,无人机,无人驾驶,AR),它可能永远不会成为无人驾驶的关键技术,与其思考这个问题,不如关注SLAM本身,即围绕定位和建图这两个基本任务,来想想里程计是不是可以估计的更准确,环境地图信息是不是可以建立得更丰富(比如有用的语义信息),场景识别/闭环检测是不是能保证更高的准确率和召回率,是不是可以借助其他传感器完善SLAM系统,接下来在想想SLAM能帮助无人驾驶做些什么?只有技术越来越完善和成熟,才能被应用到更多的实际场景中。另外,我目前在研究结合深度学习如何解决视觉SLAM场景识别问题,如果各位对这方面有兴趣或者做过相关的工作,欢迎交流!
- 2.我想SLAM真正能发挥作用的区域是last mile或者一些高精度地图覆盖不到的非结构化环境。
-
自动驾驶SAE等级

L0 无自动化
特点:完全由驾驶员进行驾驶操作,属于纯人工驾驶,汽车只负责执行命令并不进行驾驶干预。
对应技术:无任何自动驾驶技术
对应产品:很多品牌的低端配置车,如奥迪A1、宝马1系、长安奔奔、吉利远景X1
L1 驾驶支援
特点:自动系统有时能够帮助驾驶员完成某些驾驶任务,且只能帮助完成一项驾驶操作。驾驶员需要监控驾驶环境并准备随时接管。
对应技术:车道保持系统、定速巡航系统
对应产品:目前大多数车都达到L1,如别克君威、荣威550、广汽传祺、奇瑞艾瑞泽、吉利缤瑞。
L2 部分自动化
特点:自动驾驶系统有多项功能,能同时控制车速和车道。驾驶员需要监控驾驶环境并准备随时接管。
对应技术:自适应巡航系统。
对应产品:长安CS55(自主品牌里首款L2级自动驾驶量产车)、吉利博瑞GE、宝马7系、特斯拉 Model S(特斯拉本身的Auotpilot系统,不好意思,它只能算L2级别)、凯迪拉克CT6(记得超模刘雯说的“放手去做”吗,没错,说的就是它)
L3 有条件自动化
特点:在条件许可的情况下,车辆可以完成所有的驾驶动作。并具备提醒驾驶者功能。驾驶者无需监控驾驶环境,可以分心,但不可以睡觉,需要随时能够接管车辆,以便随应对可能出现的人工智能应对不了的情况。
对应技术:激光雷达不可或缺,高精度地图的支持,用来处理更为复杂、量更大的信息数据的中央处理器。
对应产品:奥迪旗舰车型A8,国内自主品牌L3级量产车预计都在2019年以后上市,如广汽新能源和一汽红旗都表示在2019年推出L3级自动驾驶量产车型。
L4 高度自动化
特点:完全自动驾驶,驾驶者可以有,也可以没有,但依然在特定的场景下实现。
对应技术:激光、雷达、高精度地图、中央处理器、智能道路和交通设施。
对应产品:无人驾驶巴士阿波龙(百度和金龙客车合作的产物,新车名字也结合了Apollo和金龙的特色。)
L5 完全自动化
特点: 完全自动驾驶,且在任何场景都可以。
对应技术:涉及到法律、高科技突破,还需进一步的深入研发。
对应产品:目前L5级自动驾驶的汽车还没出来
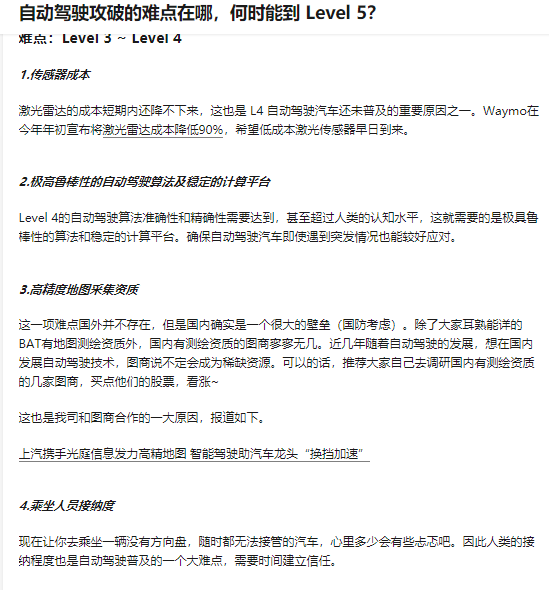
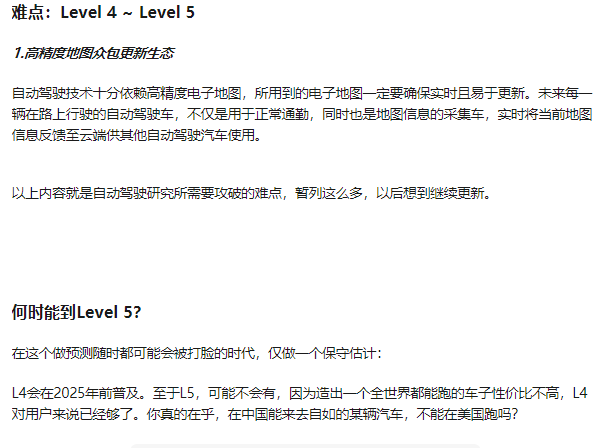
自动驾驶技术难点
参考【1】
VIO的优势在哪儿?
VIO(visual-inertial odometry)即视觉惯性里程计,有时也叫视觉惯性系统(VINS,visual-inertial system),是融合相机和IMU数据实现SLAM的算法,根据融合框架的区别又分为紧耦合和松耦合,松耦合中视觉运动估计和惯导运动估计系统是两个独立的模块,将每个模块的输出结果进行融合,而紧耦合则是使用两个传感器的原始数据共同估计一组变量,传感器噪声也是相互影响的,紧耦合算法上比较复杂,但充分利用了传感器数据,可以实现更好的效果,是目前研究的重点。
单目视觉 SLAM 算法存在一些本身框架无法克服的缺陷,首先是尺度的问题 ,单目 SLAM 处理的图像帧丢失了环境的深度信息,即使通过对极约束和三角化恢复了空间路标点的三维信息,但是这个过程的深度恢复的刻度是任意的,并不是实际的物理尺度,导致的结果就是单目SLAM 估计出的运动轨迹即使形状吻合但是尺寸大小却不是实际轨迹尺寸;由于基于视觉特征点进行三角化的精度和帧间位移是有关系的,当相机进行近似旋转运动的时候,三角化算法会退化导致特征点跟踪丢失,同时视觉 SLAM 一般采取第一帧作为世界坐标系,这样估计出的位姿是相对于第一帧图像的位姿,而不是相对于地球水平面 (世界坐标系) 的位姿,后者却是导航中真正需要的位姿,换言之,视觉方法估计的位姿不能和重力方向对齐。
通过引入 IMU 信息可以很好地解决上述问题,首先通过将 IMU 估计的位姿序列和相机估计的位姿序列对齐可以估计出相机轨迹的真实尺度,而且 IMU 可以很好地预测出图像帧的位姿以及上一时刻特征点在下帧图像的位置,提高特征跟踪算法匹配速度和应对快速旋转的算法鲁棒性,最后 IMU 中加速度计提供的重力向量可以将估计的位置转为实际导航需要的世界坐标系中。同时,智能手机等移动终端对 MEMS 器件和摄像头的大量需求大大降低了两种传感器的价格成本;硬件实现上, MEMS 器件也可以直接嵌入到摄像头电路板上。综合以上,融合 IMU 和视觉信息的 VINS 算法可以很大程度地提高单目 SLAM 算法性能,是一种低成本高性能的导航方案,在机器人、AR/VR 领域得到了很大的关注。
Reference
VIO概述 On-Manifold Preintegration for Real-Time Visual–Inertial Odometry
案例分析
最后
以上就是怕黑小海豚最近收集整理的关于SLAM与自动驾驶无人驾驶技术与SLAM的契合点在哪里?有什么理由能够让SLAM成为无人驾驶的关键技术?自动驾驶SAE等级自动驾驶技术难点VIO的优势在哪儿?案例分析的全部内容,更多相关SLAM与自动驾驶无人驾驶技术与SLAM内容请搜索靠谱客的其他文章。
![[运动控制算法]Pure Pursuit纯路径跟踪算法纯路径跟踪总结参考](https://www.shuijiaxian.com/files_image/reation/bcimg21.png)







发表评论 取消回复