目前,PanoSim 内置 7 类共 14 个传感器模型。传感器的一般化模型如图 5.22 所示。
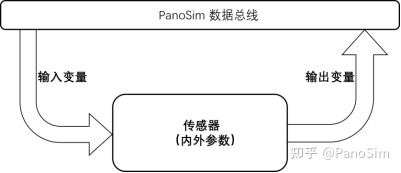
图 5.22 传感器的一般化模型示意图
每一个传感器模型由三个重要部分构成:输入变量、模型的内外参数和输出变量。输 入变量在传感器模型中由仿真场景决定并输入。模型内外参数源于用户使用过程中,在传 感器的 Property 面板设置。传感器的输出变量可以用来支持其他模块功能的开发。下面对 PanoSim 中所有传感器模型的内外参数和输出变量进行逐一介绍。
5.4.1 Mono
5.4.1.1 MonoCamera_G
单目相机传感器仿真单目相机的功能,生成图片或视频流。

图 5.23 MonoCamera_G 生成的图片
5.4.1.1.1 模型参数
单目相机的内外参数见表 5-12。
表 5-12 MonoCamera_G 参数
| 英文名称 | 参数说明 | 数据类型 | 单位 | 取值范围 | 默认值 | 备注 |
| X | 传感器在车辆坐标系上的 X 坐标 | float | m | (-inf, +inf) | 0 | |
| Y | 传感器在车辆坐标系上的 Y 坐标 | float | m | (-inf, +inf) | 0 | |
| Z | 传感器在车辆坐标系上的 Z 坐标 | float | m | (-inf, +inf) | 0 | |
| Yaw | 传感器在车辆坐标系下的航向角 | float | degree | [0, 360) | 0 | |
| Pitch | 传感器在车辆坐标系下的俯仰角 | float | degree | [0, 360) | 0 | |
| Roll | 传感器在车辆坐标系下的翻滚角 | float | degree | [0, 360) | 0 | |
| Range | 传感器的最大检测距离 | float | m | [0, +inf) | 300 | |
| Horizontal FoV | 水平视场角 | float | degree | [0, 180] | 60 | |
| Vertical FoV | 竖直视场角 | float | degree | [0, 180] | 36 | |
| Focal Length | 物理焦距 | float | mm | [0, +inf) | 20 | |
| Gamma | 伽马校正值 | float | - | [0, +inf) | 2.2 | |
| Width | 输出分辨率宽度 | int | pixel | [0, +inf) | 1280 | |
| Height | 输出分辨率高度 | int | pixel | [0, +inf) | 720 | |
| K1 | 径向畸变系数 K1 | float | - | [0, +inf) | 0 | |
| K2 | 径向畸变系数 K2 | float | - | [0, +inf) | 0 | |
| K3 | 径向畸变系数 K3 | float | - | [0, +inf) | 0 | |
| P1 | 切向畸变系数 P1 | float | - | [0, +inf) | 0 | |
| P2 | 切向畸变系数 P2 | float | - | [0, +inf) | 0 | |
| Cx | X 方向主点 | float | - | [0, 1] | 0.5 | |
| Cy | Y 方向主点 | float | - | [0, 1] | 0.5 | |
| (Chromatic Aberration) Red | 色相差红色通道仿真文件名 | - | - | |||
| (Chromatic Aberration) Blue | 色相差蓝色通道仿真文件名 | - | - | |||
| Optical Blur | 光学模糊参数 | float | - | [0, +inf) | 0 | |
| Noise Level | 噪声水平 | float | - | [0, +inf) | 0 | |
| Vignetting | 光学暗角系数(4 参数,高位到低位) | float array | - | (-inf, +inf) | 0,0,0,1 | |
| (Color Translation) Red | 颜色转换红色通道系数(4 参数,高位到 低位) | float array | - | (-inf, +inf) | 0,0,1,0 | |
| (Color Translation) Green | 颜色转换绿色通道系数(4 参数,高位到 低位) | float array | - | (-inf, +inf) | 0,0,1,0 |
| (Color Translation) Blue | 颜色转换蓝色通道系数(4 参数,高位到 低位) | float array | - | (-inf, +inf) | 0,0,1,0 | |
| Focus Distance | 对焦平面位置 | float | m | [0, +inf) | 60 | |
| Aperture | 光圈数 | float | [0, +inf) | 3.2 | ||
| Shutter Speed(s) | 快门速度 | float | s | [0, +inf) | 0.0005 | |
| Motion Blur | 运动模糊开关 | bool | - | True/False | False |
MonoCamera_G 支持基础参数设定,包括分辨率、水平/垂直视野范围、焦距等。另 外,该模型引入成像特性算法,能够模拟各种复杂的实际成像过程中的物理特性,其中包 括畸变,模糊、暗角、景深、色像差、噪声、运动模糊、颜色校正、伽马等。PanoSim 提 供技术支持,实现对该传感器各类参数进行标定匹配,从而可以定制化的模拟特定型号的 单目相机。
5.4.1.1.2 输出变量
该传感器的输出变量有三种可选方式:
a) 使用 Agent 中的 CameraOutput 进行视频输出;
b) 使用 Agent 中的 PictureOutput 进行图片输出;
c) 使用 UI 界面 Screen Number 以及 Location 输出到对应屏幕的对应位置。
5.4.1.2 MonoDetector_Lane
MonoDetector_Lane 为基于单目相机的车道线传感器,以车道线拟合参数的形式,返回 单目相机检测的 Range 和 FOV 约束范围内检测到的车道线信息。
5.4.1.2.1 模型参数
表 5-13 MonoDetector_Lane 参数
| 英文名称 | 参数说明 | 数据类型 | 单位 | 取值范围 | 默认值 | 备注 |
| X | 传感器在车辆坐标系上的 X 坐标 | float | m | (-inf, +inf) | 0 | |
| Y | 传感器在车辆坐标系上的 Y 坐标 | float | m | (-inf, +inf) | 0 | |
| Z | 传感器在车辆坐标系上的 Z 坐标 | float | m | (-inf, +inf) | 0 | |
| Yaw | 传感器在车辆坐标系下的航向角 | float | degree | [0, 360) | 0 | |
| Pitch | 传感器在车辆坐标系下的俯仰角 | float | degree | [0, 360) | 0 | |
| Roll | 传感器在车辆坐标系下的翻滚角 | float | degree | [0, 360) | 0 | |
| Range | 传感器的最大检测距离 | float | m | [0, 500] | 40 | |
| Horizontal FoV | 水平视场角 | float | degree | [0, 180] | 60 | |
| Vertical FoV | 垂直视场角 | float | degree | [0, 180] | 40 |
5.4.1.2.2 输出变量
表 5-14 MonoDetector_Lane 输出变量
| 英文名称 | 参数说明 | 数据类型 | 单位 | 取值范围 | 备注 |
| Timestamp | 仿真时间戳 | int | ms | [0, +inf) | |
| Lane_ID | 车道线编号 | int | / | [0, 3] | |
| Lane_Distance | 相邻车道线距离 | double | m | [3, 5] | |
| Lane_Car_Distance_Left | 主车两侧与左车道线距离 | double | m | [-4, 4] | |
| Lane_Car_Distance_Right | 主车两侧与右车道线距离 | double | m | [-4, 4] | |
| Lane_Curvature | 车道线曲率 | double | m-1 | [0, inf) | |
| Lane_Coefficient_C0 | 三次多项式拟合常数项 | double | / | (-inf, +inf) | |
| Lane_Coefficient_C1 | 三次多项式拟合一次项 | double | / | (-inf, +inf) | |
| Lane_Coefficient_C2 | 三次多项式拟合二次项 | double | / | (-inf, +inf) | |
| Lane_Coefficient_C3 | 三次多项式拟合三次项 | double | / | (-inf, +inf) | |
| Lane_Class | 车道线类型 | byte | / | [0, 7] |
模型输出依次为:车道线编号,相邻车道线距离,主车两侧与左右车道线距离,曲率,三次多项式拟合系数及车道线类型。 其中车道线类型包括:
0 :None, 没有线
1:SingleWhite, 白色实线
2:SingleYellow, 黄色实
3:BrokenWhite, 白色虚线
4:BrokenYellow, 黄色虚线
5:DoubleWhite, 白色双实线
6:DoubleYellow, 黄色双实线
7:unknown, 未知车道线类型
5.4.1.3 MonoDetector_Object
MonoDetector_Object 单目相机目标真值传感器返回 Range 和 FOV 视场角范围内检测到的车辆,行人,自行车,三轮车和动物的信息。
5.4.1.3.1 模型参数
表 5-15 MonoDetector_Object 参数


5.4.1.3.2 输出变量
表 5-16 MonoDetector_Object 输出变量
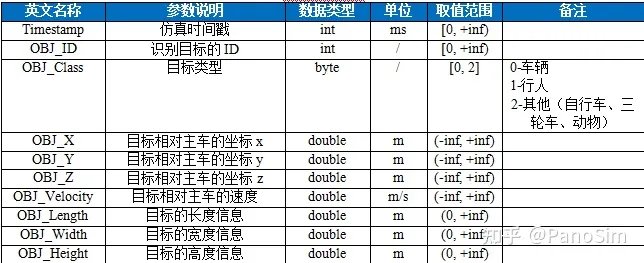
模型输出依次为:时间戳,识别目标的 ID,类型,相对主车的 XYZ 坐标、相对速度,长宽高尺寸信息。
5.4.1.4 MonoDetector_TrafficLight
MonoDetector_TrafficLight 单目相机交通灯真值传感器返回 Range 和 FOV 视场角范围内检测到的前方交通灯信息。
5.4.1.4.1 模型参数
表 5-17 MonoDetector_TrafficLight 参数
| 英文名称 | 参数说明 | 数据类型 | 单位 | 取值范围 | 默认值 | 备注 |
| X | 传感器在车辆坐标系上的 X 坐标 | float | m | (-inf, +inf) | 0 | |
| Y | 传感器在车辆坐标系上的 Y 坐标 | float | m | (-inf, +inf) | 0 | |
| Z | 传感器在车辆坐标系上的 Z 坐标 | float | m | (-inf, +inf) | 0 | |
| Yaw | 传感器在车辆坐标系下的航向角 | float | degree | [0, 360) | 0 |
| Pitch | 传感器在车辆坐标系下的俯仰角 | float | degree | [0, 360) | 0 | |
| Roll | 传感器在车辆坐标系下的翻滚角 | float | degree | [0, 360) | 0 | |
| Range | 传感器的最大检测距离 | float | m | [0, 500] | 100 | |
| HorizontalFov | 水平视场角 | float | degree | [0, 180] | 60 | |
| Vertical Fov | 垂直视场角 | float | degree | [0, 180] | 40 |
5.4.1.4.2 输出变量
表 5-18 MonoDetector_TrafficLight 输出变量
| 英文名称 | 参数说明 | 数据类型 | 单位 | 取值范围 | 备注 |
| Timestamp | 仿真时间戳 | int | Ms | [0, +inf) | |
| TrafficLight_Directi on | 交通灯方向 | byte | / | [0, 3] | 0-U turn 1-左转 2-直行 3-右转 |
| TrafficLight_State | 交通灯状态 | byte | / | [0, 2] | 0-红灯 1-黄灯 2-绿灯 |
| TrafficLight_Timer | 倒计时 | int | S | [0, +inf) |
模型输出依次为:时间戳,交通灯方向,交通灯状态及倒计时。检测前方的交通灯信息,最多可能有四种类型,分别对应四种 Direction (U-turn, 左转,直行,右转),每个交通 灯状态 0-红灯,1-黄灯,2-绿灯。
5.4.1.5 MonoDetector_TrafficSign_Obstacle
MonoDetector_TrafficSign_Obstacle 传感器返回 Range 和 FOV 视场角范围内检测到的交 通标志及障碍物信息。
5.4.1.5.1 模型参数
表 5-19 MonoDetector_TrafficSign_Obstacle 参数
| 英文名称 | 参数说明 | 数据类型 | 单位 | 取值范围 | 默认值 | 备注 |
| X | 传感器在车辆坐标系上的 X 坐标 | Float | m | (-inf, +inf) | 0 | |
| Y | 传感器在车辆坐标系上的 Y 坐标 | float | m | (-inf, +inf) | 0 | |
| Z | 传感器在车辆坐标系上的 Z 坐标 | float | m | (-inf, +inf) | 0 | |
| Yaw | 传感器在车辆坐标系下的航向角 | float | degree | [0, 360) | 0 | |
| Pitch | 传感器在车辆坐标系下的俯仰角 | float | degree | [0, 360) | 0 | |
| Roll | 传感器在车辆坐标系下的翻滚角 | float | degree | [0, 360) | 0 | |
| Range | 传感器的最大检测距离 | float | m | [0, 500] | 100 | |
| Horizontal FoV | 水平视场角 | float | degree | [0, 180] | 60 | |
| Vertical FoV | 垂直视场角 | float | degree | [0, 180] | 40 |
5.4.1.5.2 输出变量
表 5-20 MonoDetector_TrafficSign_Obstacle 输出变量
| 英文名称 | 参数说明 | 数据类型 | 单位 | 取值范围 | 备注 |
| Timestamp | 仿真时间戳 | int | ms | [0, +inf) | |
| TrafficSign_Obstacle_Type | 交通标志/障碍物 | byte | / | [0, 1] | 0-交通标志1-障碍物 |
| TrafficSign_Obstacle_Class | 交通标志/障碍物类型 | int | / | [0, +inf) | |
| TrafficSign_Obstacle_X | 交通标志/障碍物相对传感器的坐标 x | double | m | (-inf, +inf) | |
| TrafficSign_Obstacle_Y | 交通标志/障碍物相对传感器的坐标 y | double | m | (-inf, +inf) | |
| TrafficSign_Obstacle_Z | 交通标志/障碍物相对传感器的坐标 z | double | m | (-inf, +inf) |
模型输出依次为:时间戳,交通标志/障碍物 type,class,相对相机坐标系的 XYZ 坐标信息。其中,TrafficSign_Obstacle_Type 中交通标志对应 0,障碍物对应 1。交通标志/障碍 物对应的 class 参考 PanoSimDatabaseResourceStatic 的子文件夹 TrafficSign 和 Obstacle 的 official.cvs 文件。如交通标志 ID37 对应解除限速标志,ID54 对应限速 40(km/h)标志。
最后
以上就是瘦瘦月亮最近收集整理的关于PanoSim仿真模型--传感器模型之单目相机的全部内容,更多相关PanoSim仿真模型--传感器模型之单目相机内容请搜索靠谱客的其他文章。








发表评论 取消回复