不懂得小伙伴,可以先查一下,右手坐标系,然后理解航行中的Pitch 、 Roll 、 Yaw;最后结合头盔的坐标轴再来同一回顾。
三维空间的右手笛卡尔坐标如图1所示。
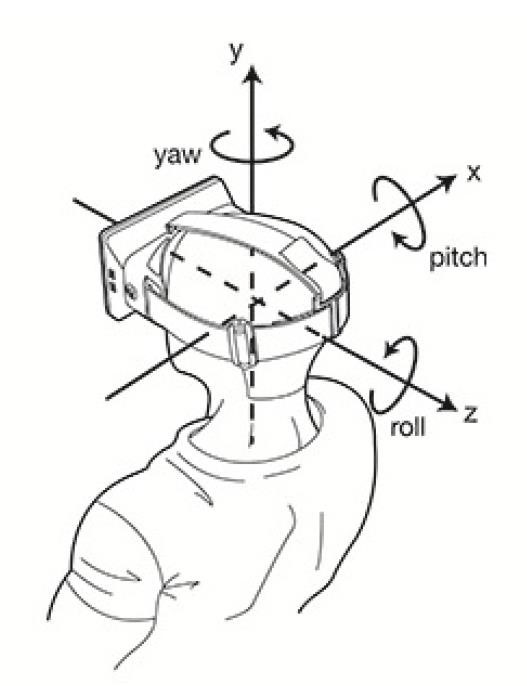
图1
在航空中,pitch, yaw, roll如图2所示。
pitch是围绕X轴旋转,也叫做俯仰角,如图3所示。
yaw是围绕Y轴旋转,也叫偏航角,如图4所示。
roll是围绕Z轴旋转,也叫翻滚角,如图5所示。
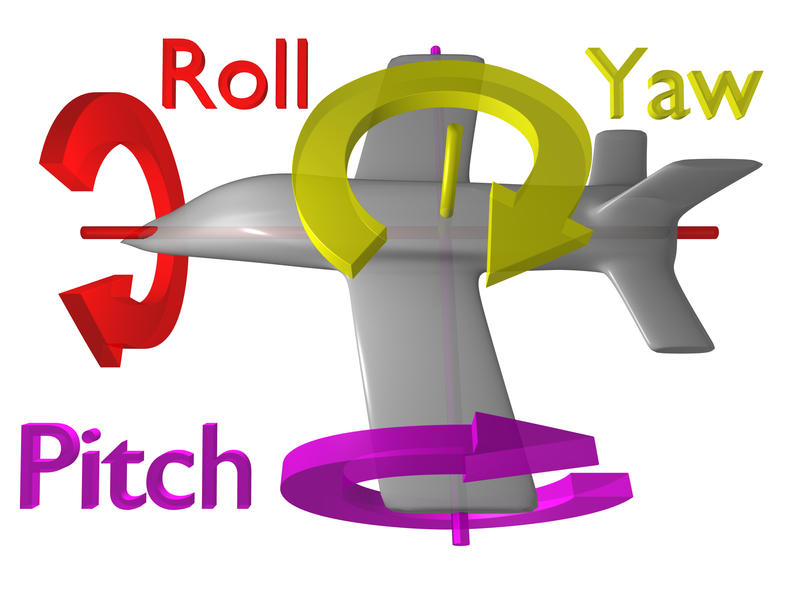
图2
图3
图4
图5
最后
以上就是狂野保温杯最近收集整理的关于语言-C#-Unity(pitch yaw roll 的概念)的全部内容,更多相关语言-C#-Unity(pitch内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复