@APM电机输出逻辑(Motors类详解)
一、概述
APM飞控中不管是姿态控制还是位置控制,串级PID都是作用在xyz三个坐标或者俯仰横滚偏航三个欧拉角上,这三个维度的控制量如何映射到具体电机上呢?
电机分配逻辑可见 @[APM电机输出逻辑(Motors类详解)]
二、逻辑详解
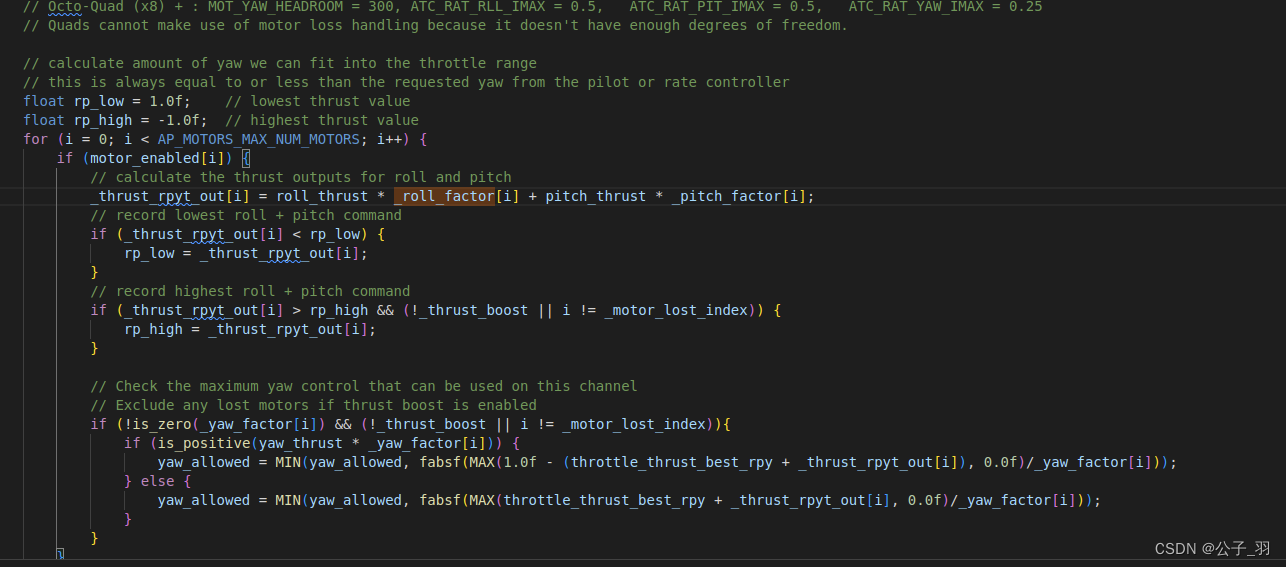
这是源码中将俯仰横滚偏航分配到具体电机的代码。
其中roll_thrust和pitch_thrust是姿态控制环中的速率控制器计算得出;_roll_factor[i]和_pitch_factor[i]是根据机架类型分配第i个电机的系数。
具体的映射便在这里实现。
最后
以上就是坦率背包最近收集整理的关于APM飞控电机输出逻辑(xyz->具体电机)一、概述的全部内容,更多相关APM飞控电机输出逻辑(xyz->具体电机)一、概述内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复