说明:虽然代码看着很多,其实只有三部分:1. 配置文件 2. 工具包 3. 训练器
一. 配置文件--config
说明网络的框架,文件名以主干网络为主
1. C3D 2. slowonly 3. x3d
下图以C3D中的C3D_light_ntu60为例
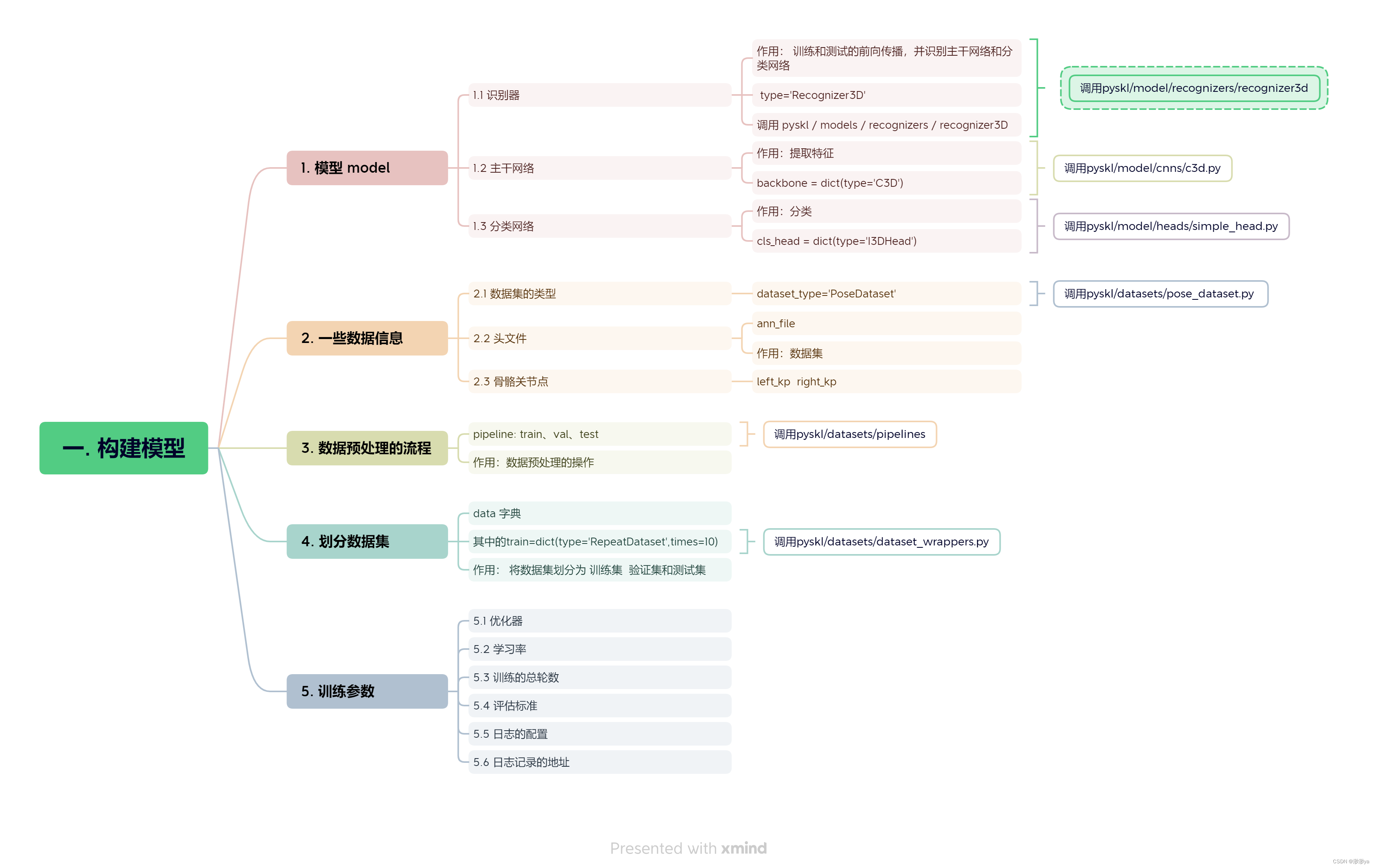
说明:ann_file 下载在 tool/data/data_doc中查找链接
二. 工具包--pyskl
1. models: 被 config/joint.py 调用
2. dataset:
(1) base.py pose_dataset.py video_dataset.py: 说明数据集的类型,是把视频转化为图片,还是直接对视频进行处理
(2)datasets/pipeline: 数据预处理部分
(3)datasets/data_wrappers.py: 重复数据集的长度,个人理解为成倍数的扩大训练的轮数,因为 在joint.py中 total_epoches=24,在data=dic(time=10),官方提供的model zoo中写道训练240轮次
说明:只要在config/joint.py中调用的,都有build.py 因为joint是以字典的形式,在调用时要把调用的类放到容器中 (个人理解)
3. 剩下的 apis core utils在tools/train.py调用
三. 训练器--tool/train.py or test.py
1. 调用pyskl/apis/train.py
2. 在apis/train.py中的数据加载和模型加载中都使用了分布式训练
(1)数据加载器的相关设置中,dataloader_setting=dict(video_per_gpu等),调用了build_dataloader
(2)模型加载中,model=MMDistributedDataParallel()
最后
以上就是靓丽小蝴蝶最近收集整理的关于poseC3D代码结构一. 配置文件--config二. 工具包--pyskl三. 训练器--tool/train.py or test.py的全部内容,更多相关poseC3D代码结构一.内容请搜索靠谱客的其他文章。

![[基于骨架的动作识别] PoseC3D (2021)背景GCN的局限性整体框架热图生成模型结果](https://www.shuijiaxian.com/files_image/reation/bcimg15.png)






发表评论 取消回复