我是靠谱客的博主 负责方盒,这篇文章主要介绍基于虚拟力算法的WSN无线传感器网络覆盖优化matlab仿真1.算法仿真效果2.MATLAB核心程序3.算法涉及理论知识概要4.完整MATLAB,现在分享给大家,希望可以做个参考。
目录
1.算法仿真效果
2.MATLAB核心程序
3.算法涉及理论知识概要
4.完整MATLAB
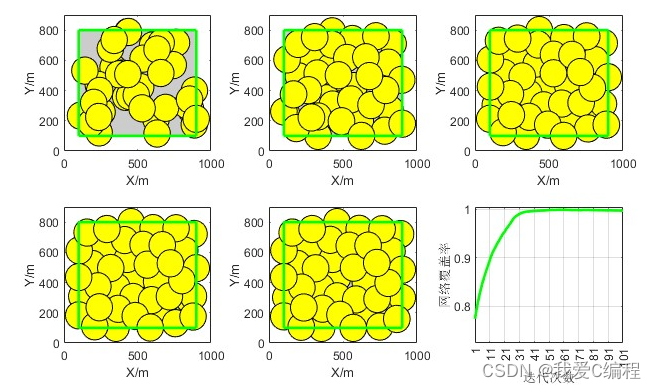
1.算法仿真效果
matlab2022a仿真结果如下:
2.MATLAB核心程序
...................................................................................
xlabel('X/m');ylabel('Y/m');
%legend('要监测的区域',['传感器节点(','fontsize{12}bf',num2str(N),'fontsize{10}rm个)的位置'],' 传感器节点的感知范围');
hold on
plot([XMIN XMAX],[YMIN YMIN],'k','linewidth',1.5);
hold on
plot([XMIN XMIN],[YMIN YMAX],'k','linewidth',1.5);
hold on
plot([XMAX XMAX],[YMIN YMAX],'k','linewidth',1.5);
hold on
plot([XMIN XMAX],[YMAX YMAX],'k','linewidth',1.5);%把四个顶点连接起来组成一个监测区域
%--------------------------------虚拟力算法---------------------------------
%------------先对区域进行离散化---------
deta=2;%网络大小
x1=XMIN:deta:XMAX;
y1=YMIN:deta:YMAX;
[xx,yy]=meshgrid(x1,y1);
[m,n]=size(xx);
K=m*n; %总的网格点数目
xx1=reshape(xx,K,1);%网格点的横坐标
yy1=reshape(yy,K,1);%网格点的纵坐标
%hold on
%plot(xx1,yy1,'g*')
%----------------计算起初的网络覆盖率-----------------------------------------------------
[no_cover,summ,k1]=compute_cover(xx1,yy1,x,r);
%no_cover存储没有被覆盖的格点位置,k1为求被覆盖的格点,summ为被覆盖的格点数;
q(1,1)=summ/K;
%-------------------------------------------------------
figure,
fill(xm(:,1),xm(:,2),[0.8,0.8,0.8]); %填充监测区域
hold on
plot(x(:,1),x(:,2),'go','markerfacecolor','r','linewidth',6); %传感器节点位置
for i=1:N
text(x(i,1)+3,x(i,2),['fontsize{8}rm',num2str(i)]); %标出传感器节点位置
end
axis([0 1000 0 900]);
xlabel('X/m');ylabel('Y/m');
%----------------------
R=2*r; %传感器节点的通信半径
maxiter=100; %最大迭代次数
max_step=2.5; %传感器节点移动的最大步长(在格点作用下的最大步长)
max_sensor=3.5; %传感器节点移动的最大步长(在传感器节点作用下的最大步长)
.....................................................................
N=40;%传感器节点个数
XMAX=900;%区域总长度
XMIN=100;
YMAX=800;%区域总宽度
YMIN=100;%区域总宽度
figure,
for j=1:kp
x=xp{j,1};
%figure,
subplot(2,3,j)
xm=[XMIN YMIN;XMIN YMAX;XMAX YMAX;XMAX YMIN];
fill(xm(:,1),xm(:,2),[0.8,0.8,0.8]);
hold on
plot(x(:,1),x(:,2),'r.','linewidth',5);
r=90; %传感器节点的感知半径
w=0:pi/50:2*pi;
for i=1:N
x1=x(i,1)+r*cos(w);
y1=x(i,2)+r*sin(w);
hold on
plot(x1,y1,'k');
text(x(i,1)+3,x(i,2),['fontsize{8}rm',num2str(i)]);
hold on
fill(x1,y1,'y')
end
axis([0 1000 0 900]);
xlabel('X/m');ylabel('Y/m');
hold on
plot([XMIN XMAX],[YMIN YMIN],'g','linewidth',2);
hold on
plot([XMIN XMIN],[YMIN YMAX],'g','linewidth',2);
hold on
plot([XMAX XMAX],[YMIN YMAX],'g','linewidth',2);
hold on
plot([XMIN XMAX],[YMAX YMAX],'g','linewidth',2);
end
%-------------------------画覆盖率曲线图----------------------------
load('q.mat');
subplot(2,3,6)
plot(1:length(q),q(:,1),'g','linewidth',2);
grid on
xlabel('迭代次数');ylabel('网络覆盖率');
grid on
xlabel('迭代次数');ylabel('网络覆盖率');
set(gca,'xTick',[1:round(length(q)/10):length(q)])
axis([1 length(q) min(q)-0.05 1.005]);
A3763.算法涉及理论知识概要
无线传感器网络(Wireless Sensor Networks,WSNs)是一种分布式传感网络,嵌入了传感器的智能设备感测、通信、处理、收集数据,然后通过互联网将数据传输给监测者进行进一步分析,是通过无线通信方式形成的一个多跳自组织网络,可用于大规模物联网应用。由于其传感器通过无线方式通信,所以位置可以随时更改,非常灵活。WSN的覆盖优化问题可以描述为在规定的监测区域内,保证传感器网络连通情况下的节点部署问题。
虚拟力场法 (Virtual Force Field),是人工势场法原理和栅格法原理结合得到的移动机器人实时避障算法。其基本思想是构造目标方位的引力场和障碍物周围的斥力场共同作用的虚拟人工力场,搜索势函数的下降方向来寻找无碰撞路径,使船舶沿虚拟排斥力和虚拟引力的合力方向运动。
虚拟力场法 (Virtual Force Field)的基本思想是构造目标方位的引力场和障碍物周围的斥力场共同作用的虚拟人工力场,搜索势函数的下降方向来寻找无碰撞路径,使船舶沿虚拟排斥力和虚拟引力的合力方向运动。它是人工势场法原理和栅格法原理结合得到的移动机器人实时避障的虚拟力场法。
4.完整MATLAB
V
最后
以上就是负责方盒最近收集整理的关于基于虚拟力算法的WSN无线传感器网络覆盖优化matlab仿真1.算法仿真效果2.MATLAB核心程序3.算法涉及理论知识概要4.完整MATLAB的全部内容,更多相关基于虚拟力算法内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复