前言
我打算做个二维的坎巴拉,其实就是电脑版的航天模拟器,如果你也有这样的想法,那你应该看看这篇文章。我们简单点,只讨论二体问题,多了也不会。
时间系统、参考系、二体问题、三体问题的一些基本概念。是第三章航天器轨道与轨道动力学的两个小节的内容。
二体问题
受其他物体摄动影响的两个物体相对运动的一般方程,很容易就可以简化成仅有两个物体的运动方程,即二体问题。首先做两个假设:
- 物体为球对称的,就可以把物体看作质量集中在其中心
- 除了沿两物体中心连线作用的引力外,没有其他外力和内力作用
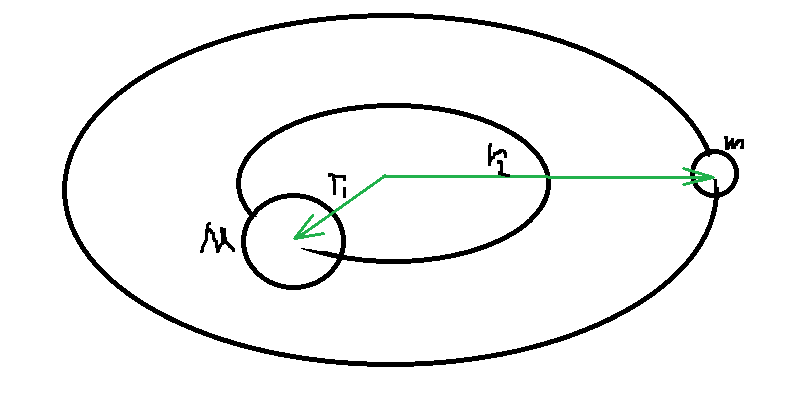
确定一个惯性参考系(无加速度、无转动),其中有两个质量分别是
M
M
M和
m
m
m的物体,它们在惯性系中的位置矢量分别是
r
1
、
r
2
r_1、r_2
r1、r2,两物体相距
r
=
r
1
−
r
2
r=r_1-r_2
r=r1−r2
根据牛顿万有引力定律,对
m
、
M
m、M
m、M有
m
r
2
⃗
¨
=
−
G
M
m
r
3
r
⃗
mddot{vec{r_2}} = - dfrac{GMm}{r^3}vec r
mr2¨=−r3GMmr
M
r
1
⃗
¨
=
G
M
m
r
3
r
⃗
Mddot{vec{r_1}} = dfrac{GMm}{r^3}vec r
Mr1¨=r3GMmr
两式相减得到二体问题相对运动方程
r
⃗
¨
=
r
⃗
2
¨
−
r
⃗
1
¨
=
−
G
(
M
+
m
)
r
3
r
⃗
ddot{vec r} = ddot{vec r_2} - ddot{vec r_1} = - dfrac{G(M+m)}{r^3}vec r
r¨=r2¨−r1¨=−r3G(M+m)r
当两个星球中的一个质量大到
r
1
→
0
r_1 rightarrow 0
r1→0,那么其会成为中心天体,有中心天体运动方程
r
⃗
¨
=
−
G
M
r
3
r
⃗
ddot{vec r} = - dfrac{GM}{r^3}vec r
r¨=−r3GMr
这说明二体问题与中心天体问题是一致的,为了方便和一般性,定义
μ
=
G
M
mu = GM
μ=GM,二体运动方程为
r
⃗
¨
+
μ
r
3
r
⃗
=
0
(
1
)
ddot{vec r} + dfrac{mu}{r^3}vec r=0;;;;;;;;;;(1)
r¨+r3μr=0(1)
对于不同的中心天体,有不同的 μ mu μ值。对于地球, μ = 3.986 005 e 5 k m / s mu = 3.986; 005e5 ; ;km/s μ=3.986005e5km/s;对于月球, μ = 4.902 794 e 3 k m / s mu =4.902; 794e3 ;; km/s μ=4.902794e3km/s;对于太阳, μ = 1.327 124 38 e 11 k m / s mu = 1.327;124;38e11;;km/s μ=1.32712438e11km/s
二体轨道运动常数 h h h
1机械能守恒
用
r
⃗
˙
dot{vec r}
r˙与(1)做点乘,
r
⃗
˙
⋅
r
⃗
¨
+
μ
r
3
r
⃗
˙
⋅
r
⃗
=
v
⃗
⋅
v
⃗
˙
+
μ
r
3
r
⃗
˙
⋅
r
⃗
=
0
dot{vec r} cdot ddot{vec r} + dfrac{mu}{r^3} dot{vec r}cdot vec r= vec vcdot dot{vec v} + dfrac{mu}{r^3} dot{vec r}cdot vec r=0
r˙⋅r¨+r3μr˙⋅r=v⋅v˙+r3μr˙⋅r=0
上式因为结果为零,两项都是标量。于是右边的
r
⃗
vec r
r就可以约掉下面一个
r
r
r
v
⃗
⋅
v
⃗
˙
+
μ
r
2
r
⃗
˙
=
d
d
t
(
v
2
2
)
+
d
d
t
(
−
μ
r
)
=
0
vec vcdot dot{vec v} + dfrac{mu}{r^2}dot{vec r} = dfrac{d}{dt}(dfrac{v^2}{2}) + dfrac{d}{dt}(-dfrac{mu}{r}) = 0
v⋅v˙+r2μr˙=dtd(2v2)+dtd(−rμ)=0
积分后有
E
=
v
2
2
+
(
c
−
μ
r
)
(
2
)
E = dfrac{v^2}{2} + (c - dfrac{mu}{r}) ;;;;;;;;;;(2)
E=2v2+(c−rμ)(2)
E是比机械能(把质量约掉的结果)。它等于从空间一点到另一点克服引力所做的功,常数c依赖于零势能点的选取。如果将中心引力体作为零势能点(例如地球表面),
c
=
μ
r
c=dfrac{mu}{r}
c=rμ,
r
r
r是星球半径;如果将无穷远处作为零势能点,
c
=
0
c=0
c=0,此时势能始终是负的。
理想情况下,比机械能在卫星沿轨道运行时一直是不变的。
2角动量守恒
用
r
⃗
{vec r}
r与(1)做叉乘,
r
⃗
×
r
⃗
¨
+
μ
r
3
r
⃗
×
r
⃗
=
r
⃗
×
r
⃗
¨
=
0
{vec r} timesddot{vec r} + dfrac{mu}{r^3} {vec r}timesvec r = {vec r} timesddot{vec r}=0
r×r¨+r3μr×r=r×r¨=0
所以矢量
r
⃗
×
v
⃗
vec r times vec v
r×v一定是个常数,记为
h
h
h。显然其垂直于
r
,
v
r,v
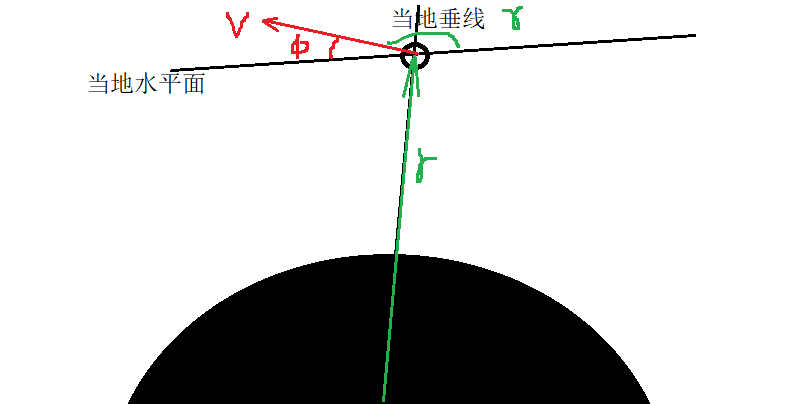
r,v形成的平面。由此证明航天器的运动被限制在一个固定平面内,称为轨道平面。
观察
r
,
v
r,v
r,v及他们与中心引力体的关系可知,无论航天器处于空间上面位置,当地垂线与矢量
r
r
r的方向一致的,所以当地水平面必定垂直
r
r
r。
定义速度矢量方向与当地垂线间夹角
γ
gamma
γ是天顶角。
速度矢量与当地水平面夹角称为航迹仰角,即航迹角
Φ
Phi
Φ。
h
=
∣
h
⃗
∣
=
∣
r
⃗
×
v
⃗
∣
=
∣
r
∣
∣
v
∣
s
i
n
γ
=
r
v
c
o
s
Φ
(
3
)
h = |vec h| = |vec r times vec v| = |r||v|singamma = rvcosPhi ;;;;;;; (3)
h=∣h∣=∣r×v∣=∣r∣∣v∣sinγ=rvcosΦ(3)
二体轨道几何方程
用
h
⃗
{vec h}
h与(1)做叉乘,
h
⃗
×
r
⃗
¨
=
−
μ
r
3
h
⃗
×
r
⃗
vec htimes ddot{vec r} = - dfrac{mu}{r^3}vec htimes vec r
h×r¨=−r3μh×r
因为
h
h
h是个常数并且有叉乘公式
(
a
×
b
)
×
c
=
b
(
a
c
)
−
a
(
b
c
)
(atimes b)times c = b(ac) - a(bc)
(a×b)×c=b(ac)−a(bc)
d
d
t
(
h
⃗
×
r
⃗
˙
)
=
h
⃗
×
r
⃗
¨
+
h
⃗
˙
×
r
⃗
˙
=
h
⃗
×
r
⃗
¨
dfrac{d}{dt}(vec htimes dot{vec r} ) = vec htimes ddot{vec r} + dot{vec h}timesdot{vec r} = vec htimes ddot{vec r}
dtd(h×r˙)=h×r¨+h˙×r˙=h×r¨
h
⃗
×
r
⃗
=
(
r
⃗
×
v
⃗
)
×
r
⃗
=
v
⃗
(
r
⃗
r
⃗
)
−
r
⃗
(
v
⃗
r
⃗
)
=
v
⃗
r
2
−
r
e
⃗
r
(
v
⃗
r
⃗
)
vec htimesvec r=(vec rtimes vec v)times vec r = vec v(vec rvec r) - vec r(vec vvec r) = vec vr^2 - rvec e_r(vec vvec r)
h×r=(r×v)×r=v(rr)−r(vr)=vr2−rer(vr)
其中
e
⃗
r
是
r
vec e_r是r
er是r方向的单位向量,拿出一个
r
r
r就是为了后面方便约掉
−
μ
r
3
h
⃗
×
r
⃗
=
μ
r
3
r
⃗
×
h
⃗
=
−
μ
r
v
⃗
+
μ
r
2
v
⃗
r
⃗
=
−
μ
r
d
r
⃗
d
t
+
μ
r
2
d
r
⃗
d
t
r
⃗
=
−
μ
d
d
t
(
r
⃗
r
)
- dfrac{mu}{r^3}vec htimesvec r =dfrac{mu}{r^3}vec rtimesvec h = -dfrac{mu}{r}vec v +dfrac{mu}{r^2}vec vvec r = - dfrac{mu}{r}dfrac{d{vec r}}{dt} +dfrac{mu}{r^2} dfrac{dvec r}{dt} vec r = -mudfrac{d}{dt}(dfrac{vec r}{r})
−r3μh×r=r3μr×h=−rμv+r2μvr=−rμdtdr+r2μdtdrr=−μdtd(rr)
d
d
t
(
r
⃗
˙
×
h
⃗
)
=
μ
d
d
t
(
r
⃗
r
)
dfrac{d}{dt}(dot{vec r}times vec h) =mudfrac{d}{dt}(dfrac{vec r}{r})
dtd(r˙×h)=μdtd(rr)
两边积分
r
⃗
˙
×
h
⃗
=
μ
r
⃗
r
+
B
⃗
dot{vec r}times vec h =mudfrac{vec r}{r} + vec B
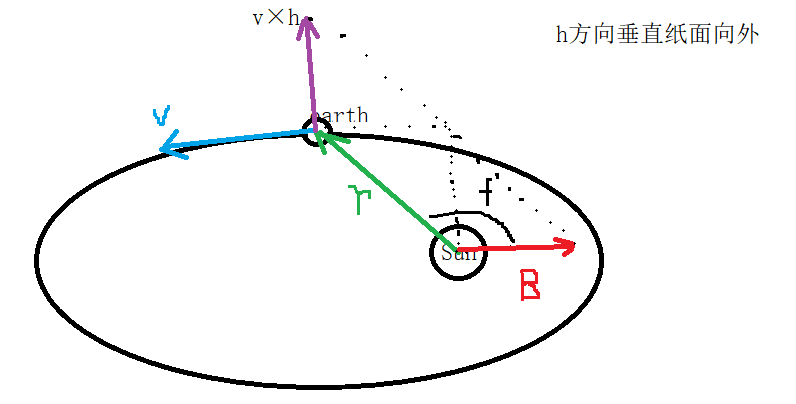
r˙×h=μrr+B
其中B是积分常矢量,方向是从中心引力体指向近拱点。下面画图解释
f
是
r
f是r
f是r与圆锥曲线上离焦点最近的一点与焦点连线间的夹角
用
r
⃗
vec r
r点乘上式可得到标量方程
r
⃗
(
r
⃗
˙
×
h
⃗
)
=
r
⃗
μ
r
⃗
r
+
r
⃗
B
⃗
vec r(dot{vec r}times vec h) = vec r dfrac{mu vec r}{r} + vec r vec B
r(r˙×h)=rrμr+rB
左
边
=
r
⃗
(
v
⃗
×
(
r
⃗
×
v
⃗
)
)
=
(
r
⃗
×
v
⃗
)
(
r
⃗
×
v
⃗
)
=
h
2
左边=vec r(vec vtimes (vec rtimes vec v ) )= (vec rtimes vec v)(vec rtimes vec v)=h^2
左边=r(v×(r×v))=(r×v)(r×v)=h2
h
2
=
μ
r
+
r
B
c
o
s
f
h^2 = mu r+rBcosf
h2=μr+rBcosf
上面第二步利用了向量混合积的概念,混合积结果是三个向量形成的立体的体积,所以满足结合律。解出
r
r
r得轨道的几何方程为
r
=
h
2
/
μ
1
+
(
B
/
μ
)
c
o
s
f
=
p
1
+
e
c
o
s
f
r = dfrac{h^2/mu}{1+ (B/mu)cosf} = dfrac{p}{1+ecosf}
r=1+(B/μ)cosfh2/μ=1+ecosfp
p
p
p是半正焦弦,常数
e
e
e是偏心率。e=0时轨迹是圆,0<e<1是椭圆,e=1是抛物线,e>1是双曲线。
综上,航天器轨道运动可以总结如下,
- 圆锥曲线族为二体问题中的航天器唯一可能的运动轨道。
- 中心引力体中心必定是圆锥曲线轨道的一个焦点。
- 当航天器沿同一条圆锥曲线轨道运动时,比机械能保持不变。动能与势能可相互转换。当航天器高度增加时,速度必定变慢,反之变快。
- 航天器绕中心引力体运动,当 r ⃗ 、 v ⃗ vec r、vec v r、v沿轨道变化时,比角动量 h ⃗ vec h h保持不变——比的意思是质量为1kg,角动量(动量矩)公式 L ⃗ = r ⃗ m v ⃗ vec L=vec rmvec v L=rmv
- 轨道运动总是处于一个固定于惯性空间的平面内
二体轨道几何性质
偏 心 率 e = c a 偏心率e=dfrac{c}{a} 偏心率e=ac 半 正 焦 弦 p = a 2 − c 2 a = a ( 1 − e 2 ) 半正焦弦p=dfrac{a^2-c^2}{a} = a(1-e^2) 半正焦弦p=aa2−c2=a(1−e2)
1轨道的近拱点与远拱点
轨道长轴的两个端点称为拱点,离主焦点近的称为近拱点(或者称近X点,如近日点),远的称为远拱点(远X点)。对于圆轨道,这些点不是确定的,对于开曲线(抛物线与双曲线),远拱点没有物理意义。
主焦点至近拱点距离
r
p
=
p
1
+
e
=
a
(
1
−
e
)
r_p = dfrac{p}{1+e}=a(1-e)
rp=1+ep=a(1−e)
主焦点至远拱点的距离
r
a
=
p
1
−
e
=
a
(
1
+
e
)
r_a = dfrac{p}{1-e}=a(1+e)
ra=1−ep=a(1+e)
在任何圆锥曲线轨道的近拱点或远拱点处,总有位置矢量与速度矢量垂直
h
=
r
p
v
p
=
r
a
v
a
h=r_pv_p=r_av_a
h=rpvp=rava
2轨道形状
对所有的圆锥曲线轨道都成立这个简单的关系式表明,轨道长半轴a仅与航天器比机械能E有关。进一步说,E仅与轨道上任一点的rv有关,即
- 圆和椭圆轨道a>0,E<0
- 抛物线轨道a= ∞ infty ∞(抛物线的a,c值都是无穷),E=0
- 双曲线轨道a<0,E>0
因为默认以无穷远点为零势能点,航天器向心力与引力平衡,椭圆平均半径等于半长轴,推出E与a的关系如下,
E
=
势
能
+
动
能
=
{
m
v
2
2
−
G
M
m
r
}
∣
m
=
1
,
v
=
G
M
/
r
=
−
μ
2
r
=
−
μ
2
a
E=势能+动能={dfrac{mv^2}{2} - dfrac{GMm}{r}}|_{m=1,v=sqrt{GM/r}}=-dfrac{mu}{2r}=-dfrac{mu}{2a}
E=势能+动能={2mv2−rGMm}∣m=1,v=GM/r=−2rμ=−2aμ
所以仅由航天器比机械能的符号就可以确定航天器处于哪种类型的圆锥曲线轨道内。由于
p
=
h
2
/
μ
,
E
=
−
μ
/
2
a
p=h^2/mu,E=-{mu}/{2a}
p=h2/μ,E=−μ/2a,h单独决定p,E单独决定a,而Eh决定e,即确定了圆锥曲线轨道的具体形状。
e
=
1
+
2
E
h
2
μ
2
e=sqrt{1+dfrac{2Eh^2}{mu^2}}
e=1+μ22Eh2
圆型限制性三体问题
只考虑两个相互作用的质点所组成的质点系在惯性系中的运动问题,称为二体问题。三体问题则是研究3个引力体之间的运动问题。限制性三体问题是低三个质量较之于其他两个可以忽略,即
m
对
M
1
,
M
2
没
有
引
力
作
用
,
只
考
虑
M
1
和
M
2
的
相
互
吸
引
力
和
对
m
的
引
力
m对M_1,M_2没有引力作用,只考虑M_1和M_2的相互吸引力和对m的引力
m对M1,M2没有引力作用,只考虑M1和M2的相互吸引力和对m的引力
M
1
M
2
M_1M_2
M1M2按照圆锥曲线轨道做无摄动运动,按运动曲线可分为双曲线型限制性三体问题,抛物线型限制性三体问题,圆型限制性三体问题。
假设 S u n Sun Sun和 p l a n e t planet planet围绕其公共质心做圆周运动,则由 S u n 、 p l a n e t 、 s a t e l l i t e Sun、planet、satellite Sun、planet、satellite组成的系统属于原型限制性三体问题。为了描述卫星的轨道运动,建立如下图所示的质心旋转坐标系C-XYZ,M1是 S u n Sun Sun,M2是 p l a n e t planet planet,m是 s a t e l l i t e satellite satellite。
- 圆心C是质心,
S
u
n
和
p
l
a
n
e
t
Sun和planet
Sun和planet围绕质心旋转,两者都处在X轴上,
s
a
t
e
l
l
i
t
e
;satellite
satellite
位置随意。旋转时C-XYZ坐标系以Z轴垂直纸面向内做顺时针旋转。
平动点(拉格朗日点)
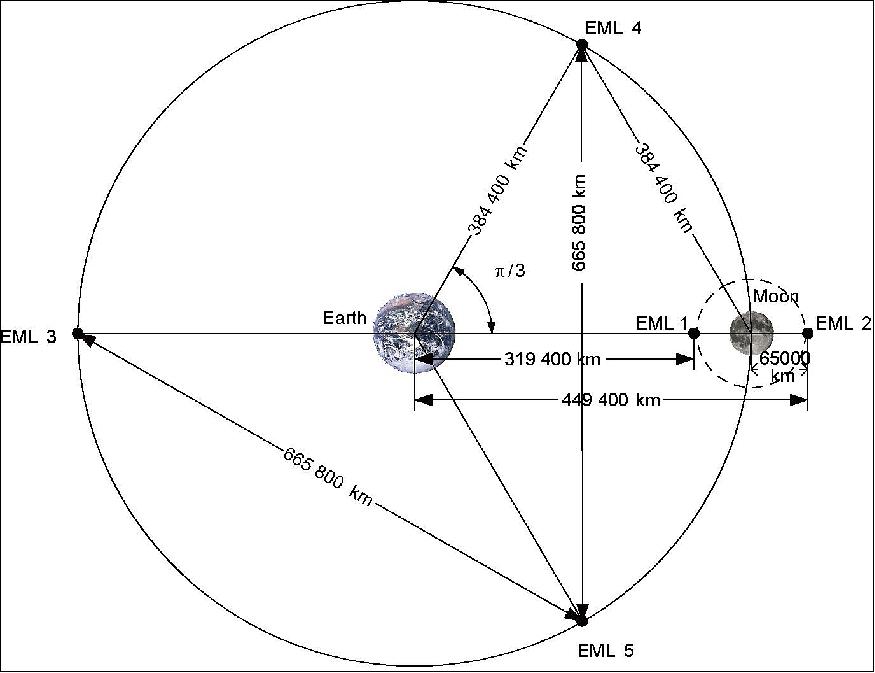
参考《航天器动力学与控制》
最后
以上就是隐形乌龟最近收集整理的关于【Demllie航天】二体问题(是平面问题)的全部内容,更多相关【Demllie航天】二体问题(是平面问题)内容请搜索靠谱客的其他文章。








发表评论 取消回复