系列文章目录
文章目录
- 系列文章目录
- 前言
- 一、非线性系统线性化
- 原理
- 二、反馈控制
- 开环控制
- 反馈or闭环控制
- PID Controller
- PID微调
- 案例
- 总结
前言
- 将非线性系统近似线性化
- PIDblock与微调
提示:以下是本篇文章正文内容,下面案例可供参考
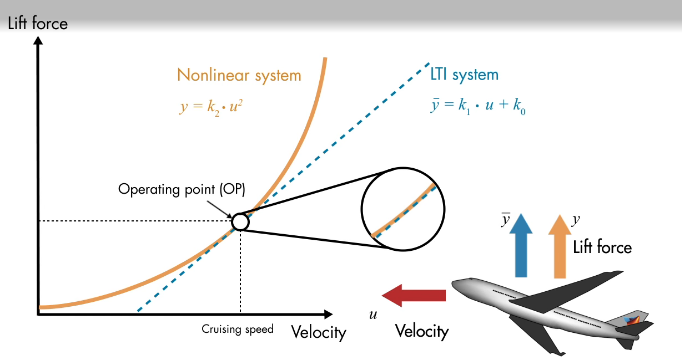
一、非线性系统线性化
- 非线性系统输入电流与电机带动物体位移的关系:
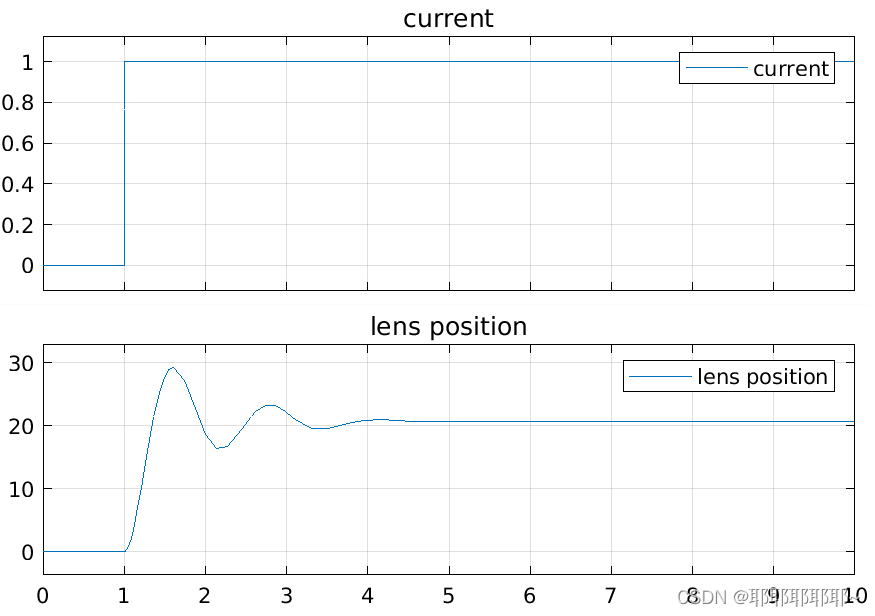
其输入的电流值与最终输出的位移值为非线性关系.
- 在APP标签页下点击
](https://img-blog.csdnimg.cn/f41fe43edb434193b4c9129bb17be861.png) , 将需要线性化的系统的输入输出分别设置为
, 将需要线性化的系统的输入输出分别设置为
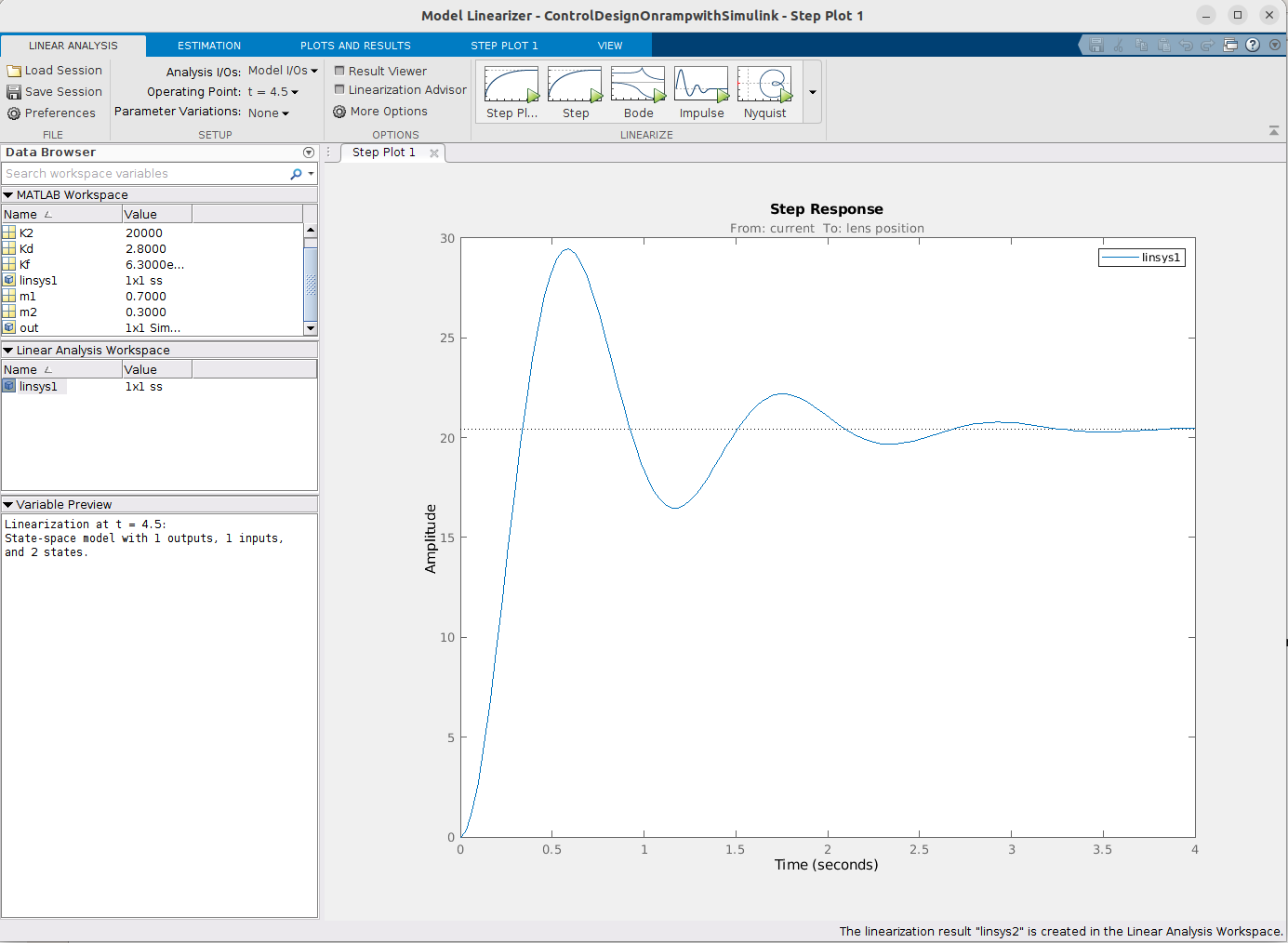
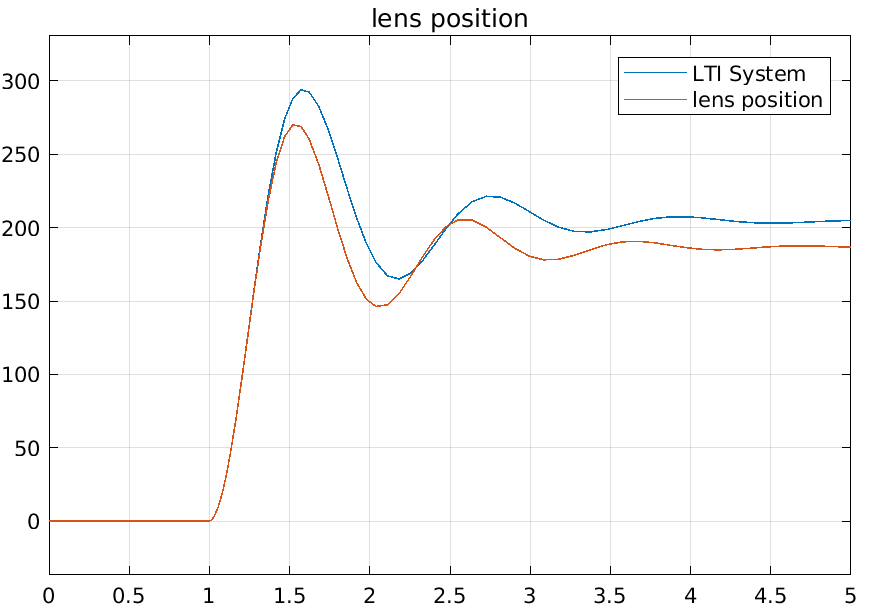
- APPS->Model Linearizer。在SETUP 中设置操作点 这里t=4.5, 然后点击step,会在工作区显示出阶跃响应曲线。将Linear Analysis Workspace中的linsys拖拽至MATLAB Workspace。
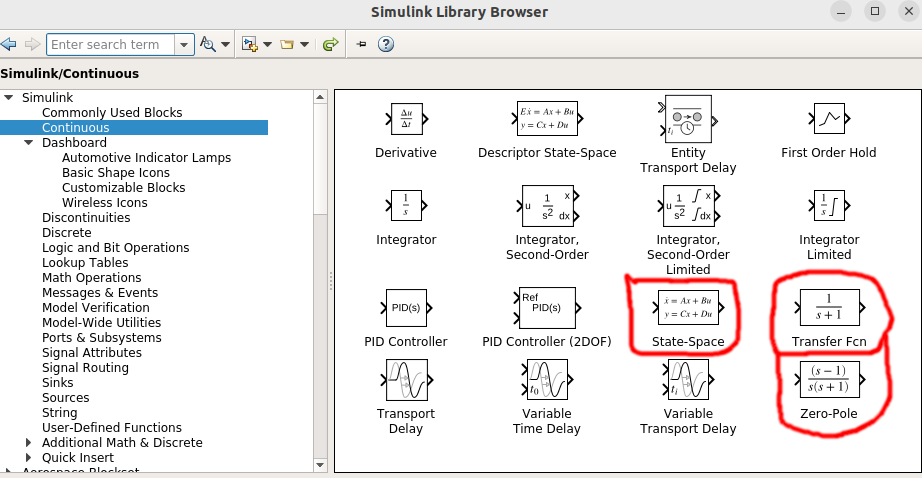
- 添加LTI system模块,将LTI system variable替换为之前新增的变量,比较系统线性化后与原系统的输出
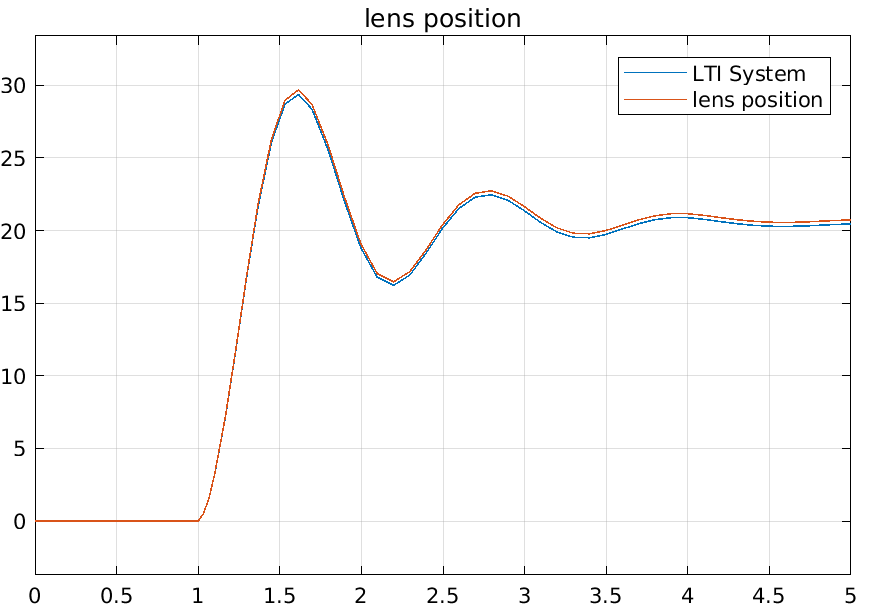
当把输入从原来的1改为10后,次线性系统失效
更多与系统线性化相关的模块参考可参考相关文档
在Model Linearizer窗口中可单击图像空白处查看:
- 上升时间
- 超调量
- 达到稳态的时间
- 稳态值
原理
非线性函数的切线处可近似线性化切点附近
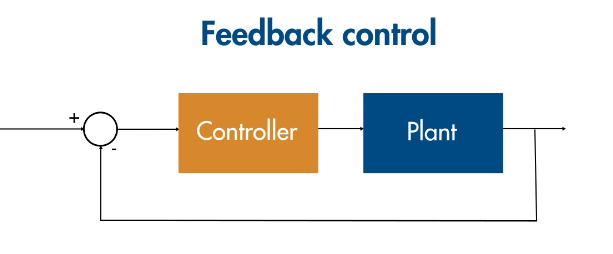
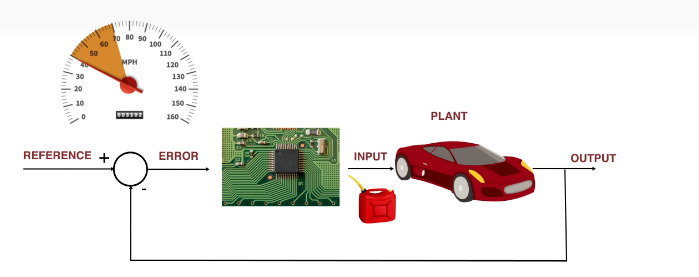
二、反馈控制
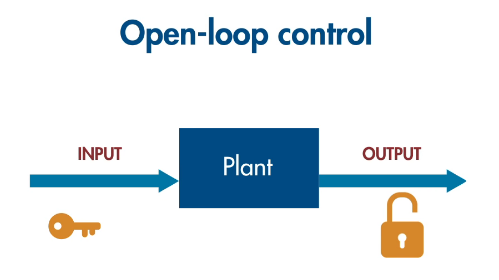
开环控制
反馈or闭环控制
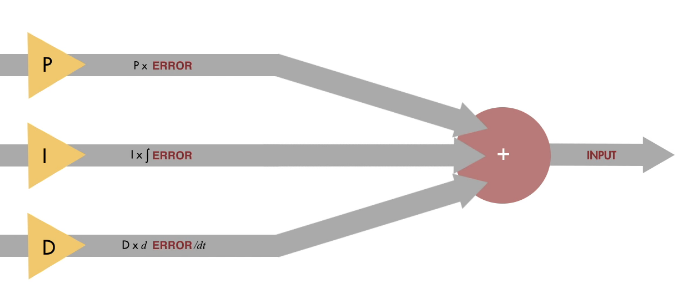
PID Controller
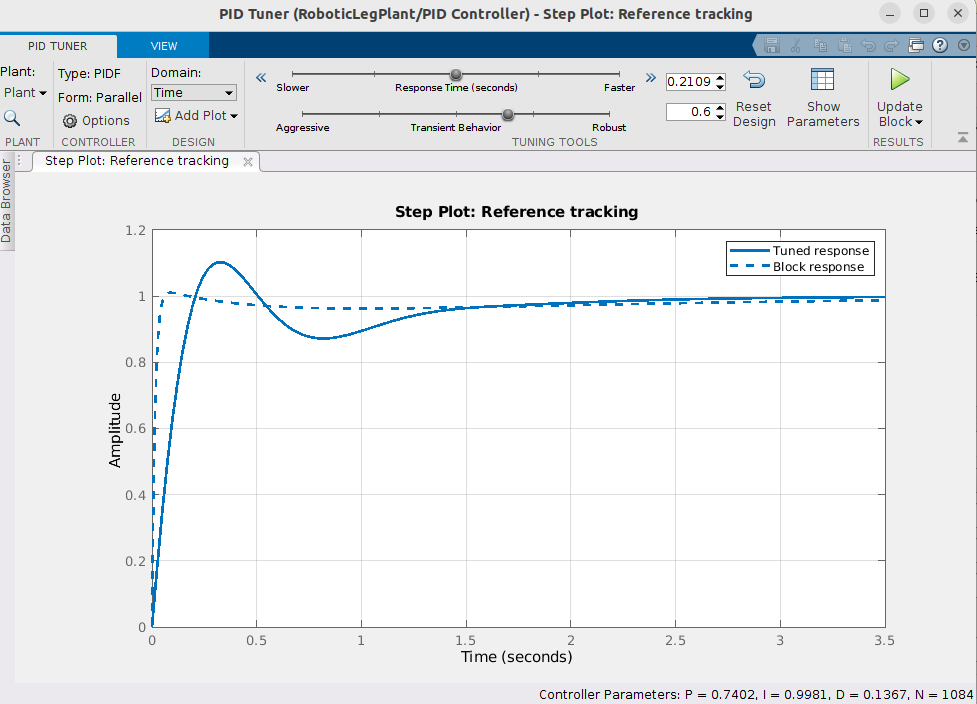
PID微调
双击PIDblock打开对话框,右下边点击tune即可对PID参数进行调整
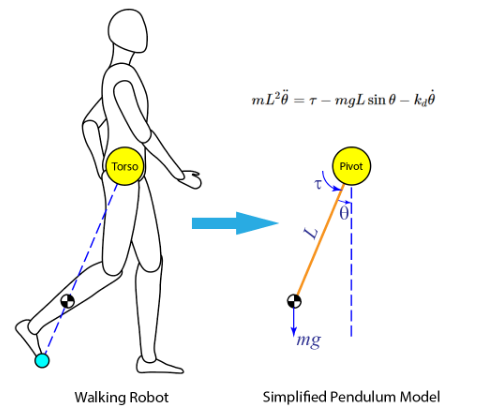
案例
m
L
2
θ
¨
=
τ
−
m
g
L
s
i
n
θ
−
k
d
θ
˙
mL^2ddot theta = tau - mgLsintheta - k_d dot theta
mL2θ¨=τ−mgLsinθ−kdθ˙
总结
最后
以上就是谨慎发卡最近收集整理的关于simulink PID控制系列文章目录前言一、非线性系统线性化二、反馈控制总结的全部内容,更多相关simulink内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。






![[MatLab]图像绘制一、绘制二维图像 二、绘制三维图像](https://www.shuijiaxian.com/files_image/reation/bcimg27.png)

发表评论 取消回复