作者 | 3D视觉开发者社区用户“152****7486”
编辑 | 3D视觉开发者社区
文章目录
- 前言
- 开发板组装:
- 1.系统配置
- 1.1 解决无法显示中文的问题安装中文依赖
- 1.2 安装中文输入法
- 2.Zora P1和jetson TX2硬件对比
- 3.yolo网络在不同的硬件上运行速度对比
- 4.Zora P1 +realsense D435相机生成点云图
- 1.安装SDK(最好安装SDK,要不然ros下的相机驱动可能没法使用,对arm平台的支持不完善)
- 2.相机驱动安装
- 3.深度图和彩色图融合点云图
- 遇到的问题
- 1.无法无线上网
- 2. 编译程序时,内存太小无法编译
- 3.关于编译的问题
前言
Zora P1(D2/D4)开发板是奥比中光针对3D视觉技术的应用开发而定制,与奥比中光RGBD模组、软件SDK等高度适配;并提供丰富的周边配件产品:poe插板、emmc插板、麦克风阵列、lcd屏幕触摸屏、MIPI-CSI接口摄像头模组等,适用于各种场景需求。 开发板组装: Zora P1(D2/D4)开发板是奥比中光针对3D视觉技术的应用开发而定制,与奥比中光RGBD模组、软件SDK等高度适配;并提供丰富的周边配件产品:poe插板、emmc插板、麦克风阵列、lcd屏幕触摸屏、MIPI-CSI接口摄像头模组等,适用于各种场景需求。
开发板组装:

按照教程<<01 ubuntu18.04 烧录方法_0630.docx>>及官网教程: http://abzg.szmynet.net/technical_library.html?id=25 安装了armbian系统,安装好以后的界面如下:
1.系统配置
1.1 解决无法显示中文的问题安装中文依赖
sudo apt-get install fonts-arphic-uming
重启,即可解决无法显示中文的问题
1.2 安装中文输入法
参考链接
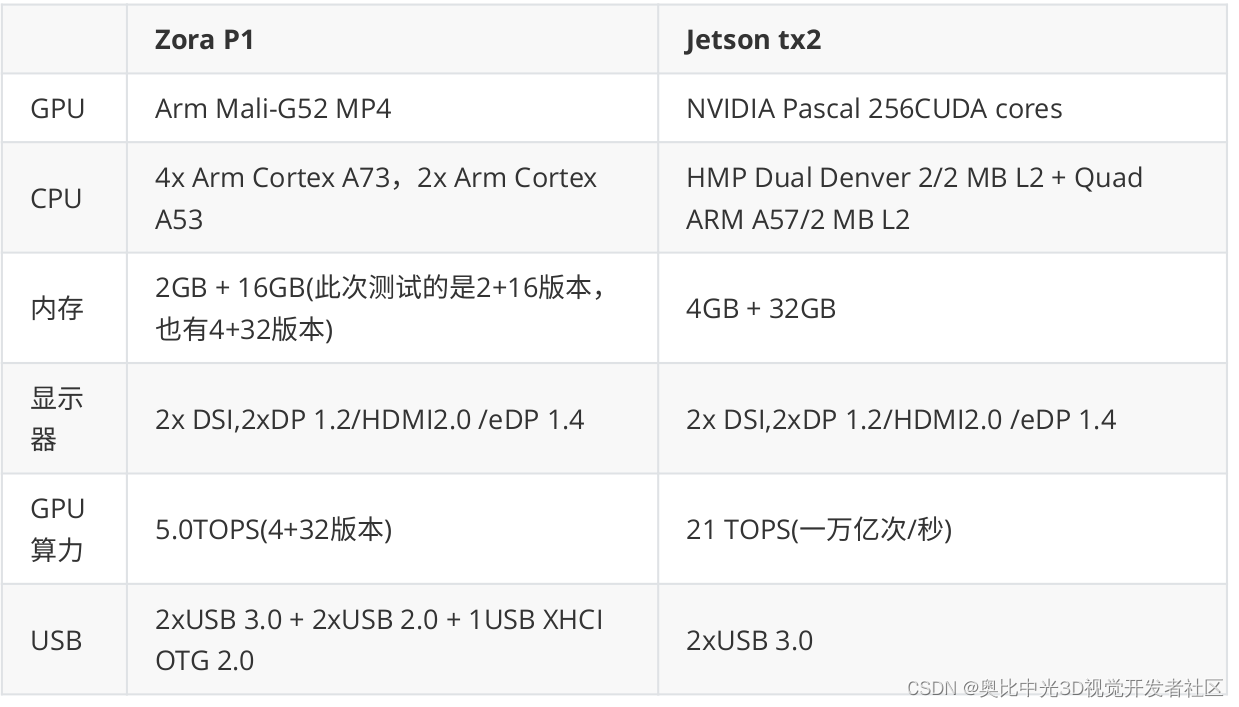
2.Zora P1和jetson TX2硬件对比
3.yolo网络在不同的硬件上运行速度对比
YOLO网络介绍:YOLO是最新的实时物体检测系统。在Pascal Titan X上,它以30 FPS的速度处理图像,并且在COCO测试开发中的mAP为57.9%。YOLOv3非常快速和准确。在mAP值为0.5 IOU时,YOLOv3与Focal Loss相当,但速度约快4倍。此外,您只需更改模型的大小即可轻松在速度和精度之间进行权衡,而无需重新训练!
yolo网络配置:
yolo官网
yolo的ros版本
cd catkin_workspace/src
git clone --recursive git@github.com:leggedrobotics/darknet_ros.git
cd ../
catkin_make -DCMAKE_BUILD_TYPE=Release
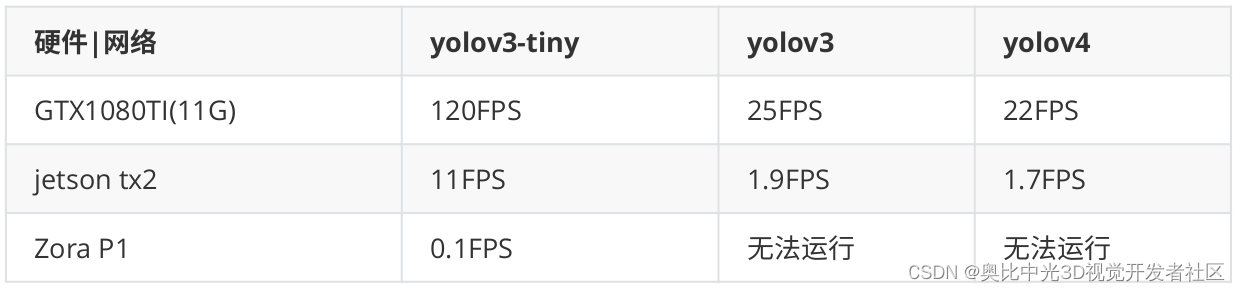
我们对比一下不同硬件运行yolo网络的情况,对比结果如下:
1.当yolo.cfg里面设置width=608,height=608
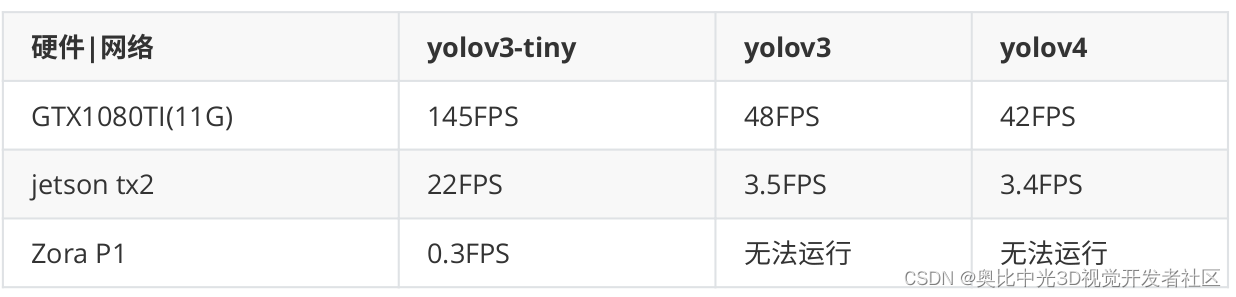
2.当yolo.cfg里面设置width=416,height=416
3.当yolo.cfg里面设置width=320,height=320
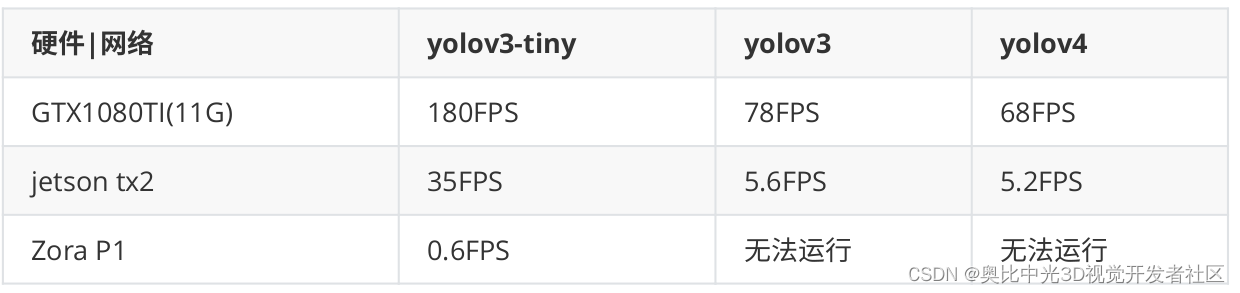
注:width和height值越小,精度会随之下降。
结论:Zora P1开发板相比于jetson tx2来说,性能较弱,不足以运行yolo网络。原因主要是Zora P1的GPU不是英伟达的,无法用cuda加速。
4.Zora P1 +realsense D435相机生成点云图
arm平台安装ros下的realsense相机驱动步骤:
1.安装SDK(最好安装SDK,要不然ros下的相机驱动可能没法使用,对arm平台的支持不完善)
# 安装依赖
sudo apt install --install-recommends linux-generic-lts-xenial xserver-xorg-core-lts-xenial xserver-xorg-lts-xenial xserver-xorg-video-all-lts-xenial xserver-xorg-input-all-lts-xenial libwayland-egl1-mesa-lts-xenial
#下载源码
git clone https://github.com/IntelRealSense/librealsense.git
cd librealsense
sudo apt-get install git libssl-dev libusb-1.0-0-dev pkg-config libgtk-3-dev libglfw3-dev
mkdir build && cd build
cmake ..
make -j1 # 系统运行内存太小,此处只开一个线程,要不然没法编译
sudo make install
如果没报错就ok了,运行realsense-viewer测试一下能不能打开相机
2.相机驱动安装
#创建一个工作空间
mkdir -p ~/realsense_ws/src
cd ~/realsense_ws/src/
#下载源代码
git clone https://github.com/IntelRealSense/realsense-ros.git
cd realsense-ros/
catkin_make
catkin_make install
#添加到环境变量里
echo "source ~/realsense_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
运行相机驱动:
roslaunch realsense_camera rs_camera
3.深度图和彩色图融合点云图
我们订阅相机发布深度图和彩色图的节点,利用相机的内参及相应的转换公式,可以得到点云图,效果如下:
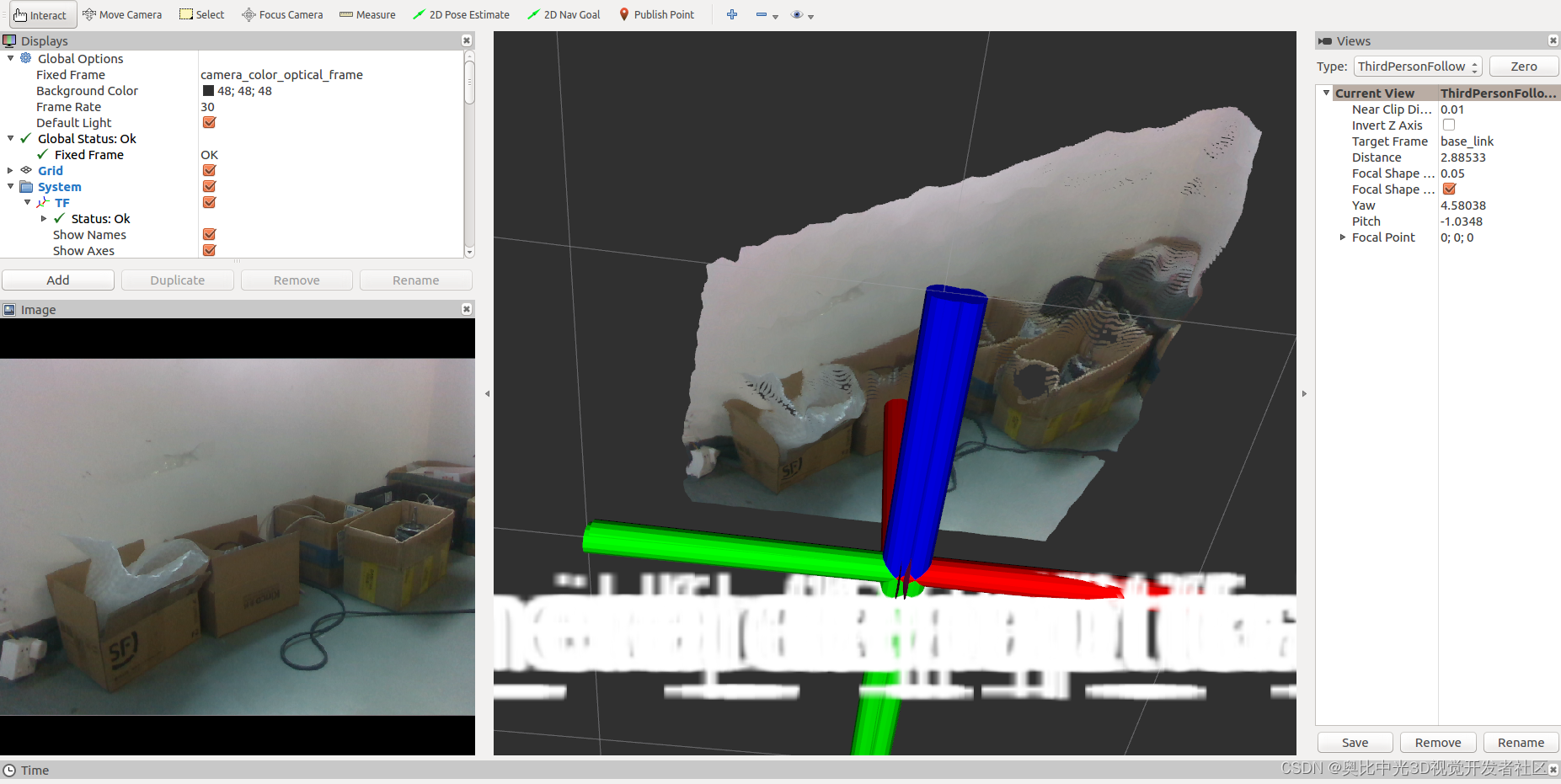
效果还不错,并且融合点云的频率有30HZ,完全满足要求.
遇到的问题
1.无法无线上网
有一次在执行完sudo apt-get upgrade,重启电脑,发现无法无线上网,按照网上的修复教程也没修复成功,应该是需要重新安装网卡驱动,苦于没有找到网卡型号,于是重装系统,问题解决.
2. 编译程序时,内存太小无法编译
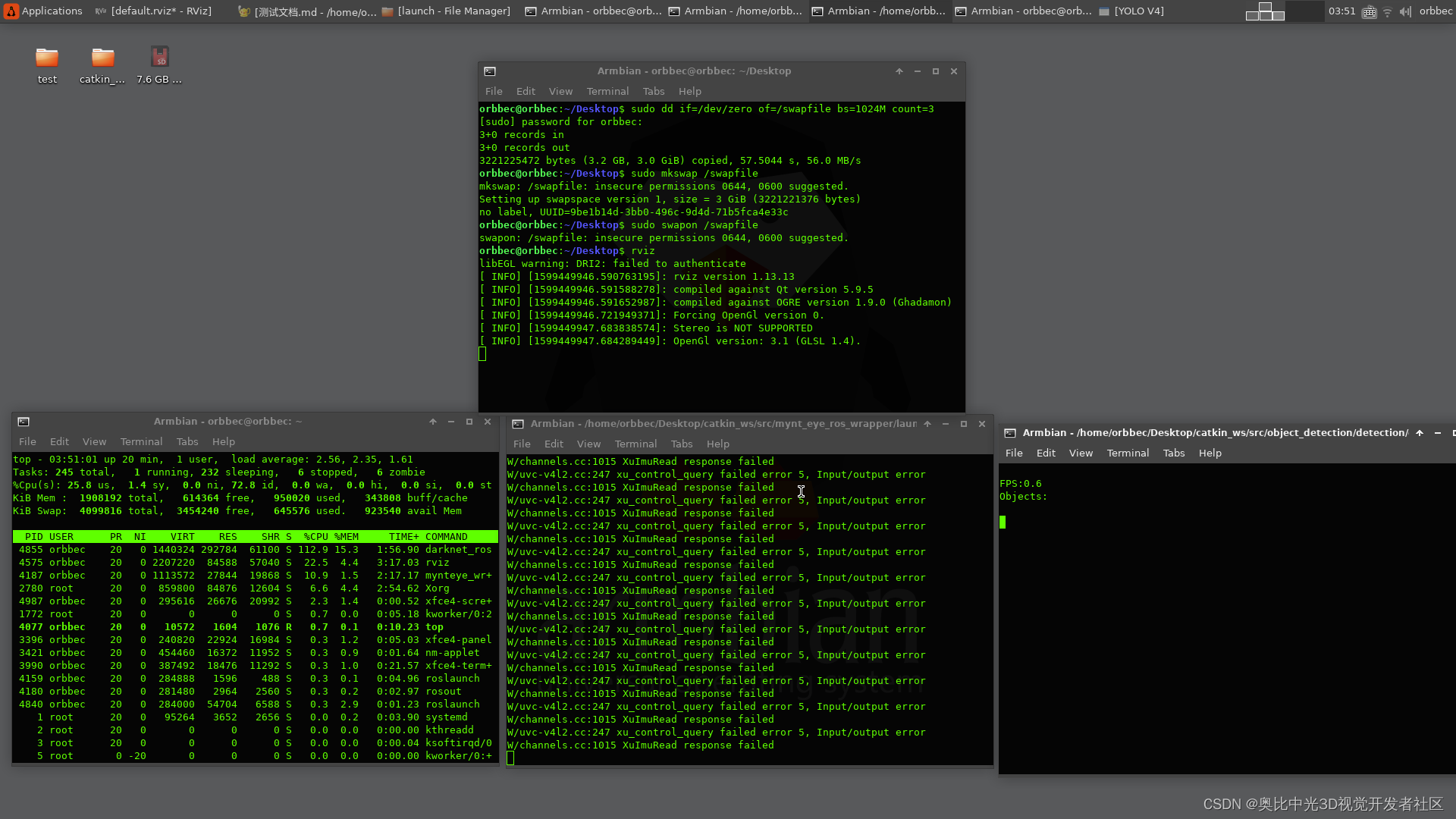
主要是开发板只有2GB内存,使用的时候不要打开浏览器.编译时可以使用 make -j1 开启一个线程编译。如果这样都还不行的话,可以临时增大交换空间的大小。具体做法如下:
挂载分区并加入SWAP分区
sudo dd if=/dev/zero of=/swapfile bs=1024M count=4 #4GB
sudo mkswap /swapfile
sudo swapon /swapfile
删除挂载点/临时交换分区:
sudo swapoff /swapfile
sudo rm /swapfile
参考:此链接
3.关于编译的问题
在开发板上编译太慢,可以考虑在配置高的电脑上编译好了,再把编译好的文件拷贝到开发板上(交叉编译).
ros下交叉编译:链接一
连接二
连接三
连接四
版权声明:本文为奥比中光3D视觉开发者社区特约作者授权原创发布,未经授权不得转载,本文仅做学术分享,版权归原作者所有,若涉及侵权内容请联系删文。
3D视觉开发者社区是由奥比中光给所有开发者打造的分享与交流平台,旨在将3D视觉技术开放给开发者。平台为开发者提供3D视觉领域免费课程、奥比中光独家资源与专业技术支持。进入3D视觉开发者社区,和开发者们一起讨论分享吧~
最后
以上就是鳗鱼鸭子最近收集整理的关于Zroa P1评测记录前言1.系统配置2.Zora P1和jetson TX2硬件对比3.yolo网络在不同的硬件上运行速度对比4.Zora P1 +realsense D435相机生成点云图遇到的问题的全部内容,更多相关Zroa内容请搜索靠谱客的其他文章。








发表评论 取消回复