在之前的ROS-Industrial Overview中,ROS-I 的高层架构包含有MoveIt层,用来完成机器人的运动规划任务。在此记录一下在使用过程中遇到的磨人的问题。
文章目录
- 1. 问题描述
- 2. 解决方法
- 3. 参考资料
1. 问题描述
在使用ROS-I控制实体机器人的过程中,通过向MoveIt的规划环境中添加碰撞物体约束,以生成机器人运动的无碰撞轨迹。但在添加完CollisionObject约束之后,发现添加的物体不能同步到 PlanningSceneInterface 变量中,或者说不能显示到 RVIZ 的规划场景中。比如用以下代码添加场景中已固定的障碍物体:
void my_class_name::setFixedCollisionObjects()
{
moveit_msgs::CollisionObject collision_object;
collision_object.header.frame_id = "/world";
collision_object.id = "table_base";
shape_msgs::SolidPrimitive primitive;
primitive.type = primitive.BOX;
primitive.dimensions.resize(3);
primitive.dimensions[0] = 0.75;
primitive.dimensions[1] = 1.1;
primitive.dimensions[2] = 0.85;
geometry_msgs::Pose table_pose;
table_pose.orientation.w = 1.0;
table_pose.position.x = 0.375;
table_pose.position.y = 0;
table_pose.position.x = 0.425;
collision_object.primitives.push_back(primitive);
collision_object.primitive_poses.push_back(table_pose);
collision_object.operation = collision_object.ADD;
collision_objects.push_back(collision_object);
planning_scene_interface.addCollisionObjects(collision_objects);
}
其中planning_scene_interface 和 collision_objects定义在类的私有变量中,而在代码执行顺序上,以上函数在类的初始化函数内执行。
void my_class_name::init()
{
start(); //内部是启动spinner
setFixedCollisionObjects();
}
期望的是在执行障碍物体添加代码之后,能够在RVIZ的场景中可视化碰撞的物体,也表示障碍物体已经同步到planning_scene_interface中了,即希望看到:
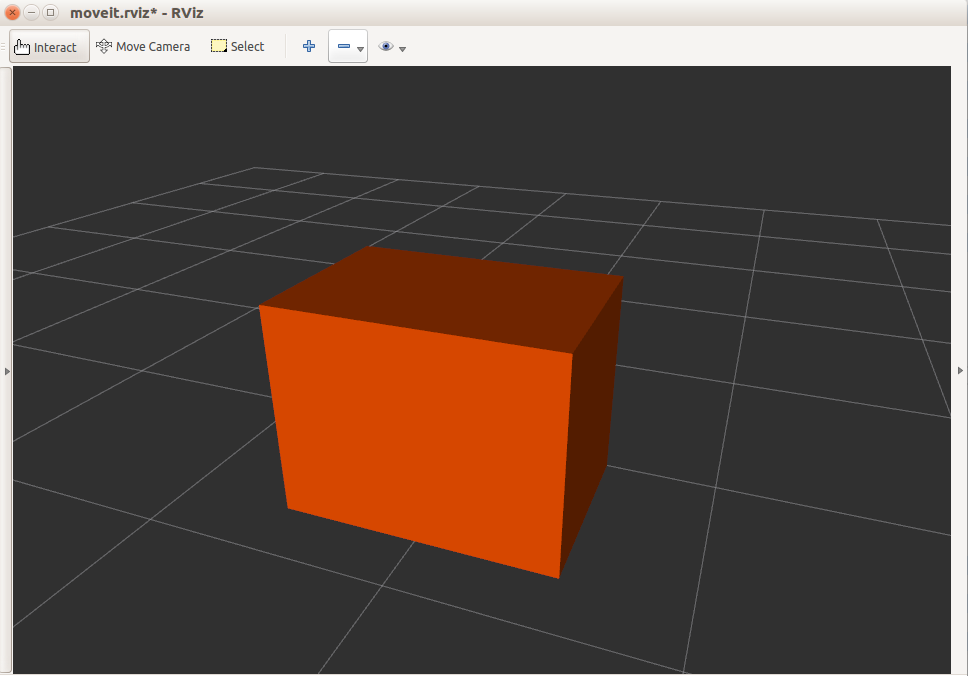
然而实际上如下图所示:
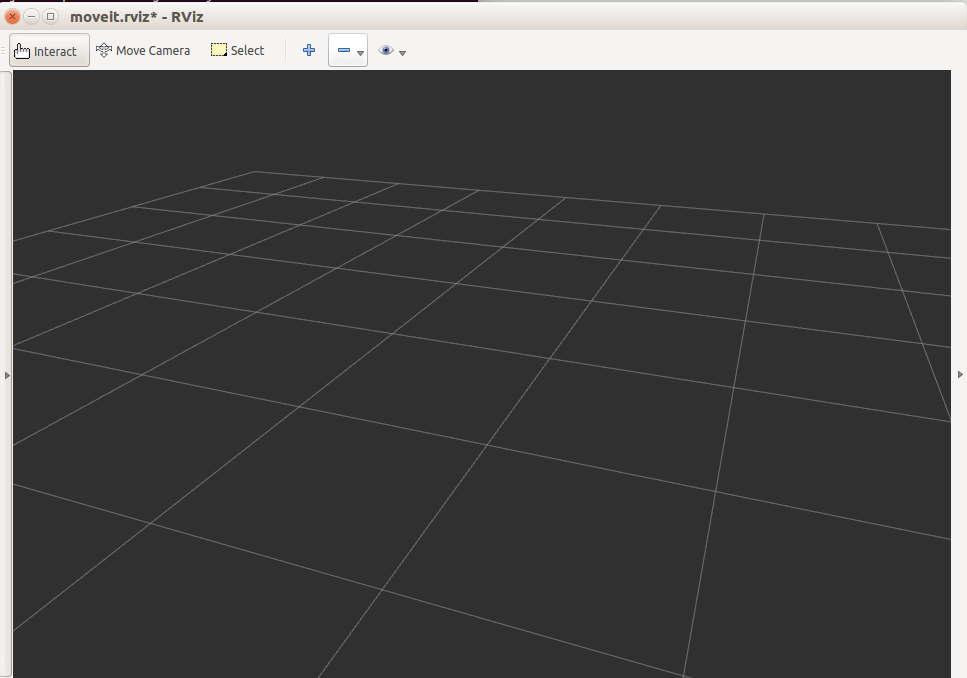
2. 解决方法
不能确定这个方法是不是对所有此类情景都有效,但确实是解决了我遇到的问题,即在添加碰撞物体之前,添加sleep(1.0);如下的代码形式:
void my_class_name::setFixedCollisionObjects()
{
sleep(1.0);
moveit_msgs::CollisionObject collision_object;
collision_object.header.frame_id = "/world";
collision_object.id = "table_base";
% 接下来的其它代码省略掉了……
}
重要的是sleep()函数,而不是里面的时间参数到底是多少,也可以设置时间参数为其它数值:2.1,3.0……,然后就成了期望的情形,可以可视化,并同步到了规划场景变量中。在Moveit PlanningSceneInterface addBox not showing in Rviz中,也说明了如果不在物体添加之前加入sleep()函数,场景中碰撞物体的构建与同步会被跳过。
3. 参考资料
[1] Moveit PlanningSceneInterface addBox not showing in Rviz
最后
以上就是明亮自行车最近收集整理的关于ROS-Industrial 之 MoveIt —— 碰撞物体约束添加1. 问题描述2. 解决方法3. 参考资料的全部内容,更多相关ROS-Industrial内容请搜索靠谱客的其他文章。



 的方式?参考" class="embed-responsive-item">
的方式?参考" class="embed-responsive-item">




发表评论 取消回复