目录
- 安装系统
- 换源
- 安装VNC服务
- 安装ROS
- 初始化rosdep和环境
- 测试
平台:Jetson Nano
系统版本:4.6.1
安装系统
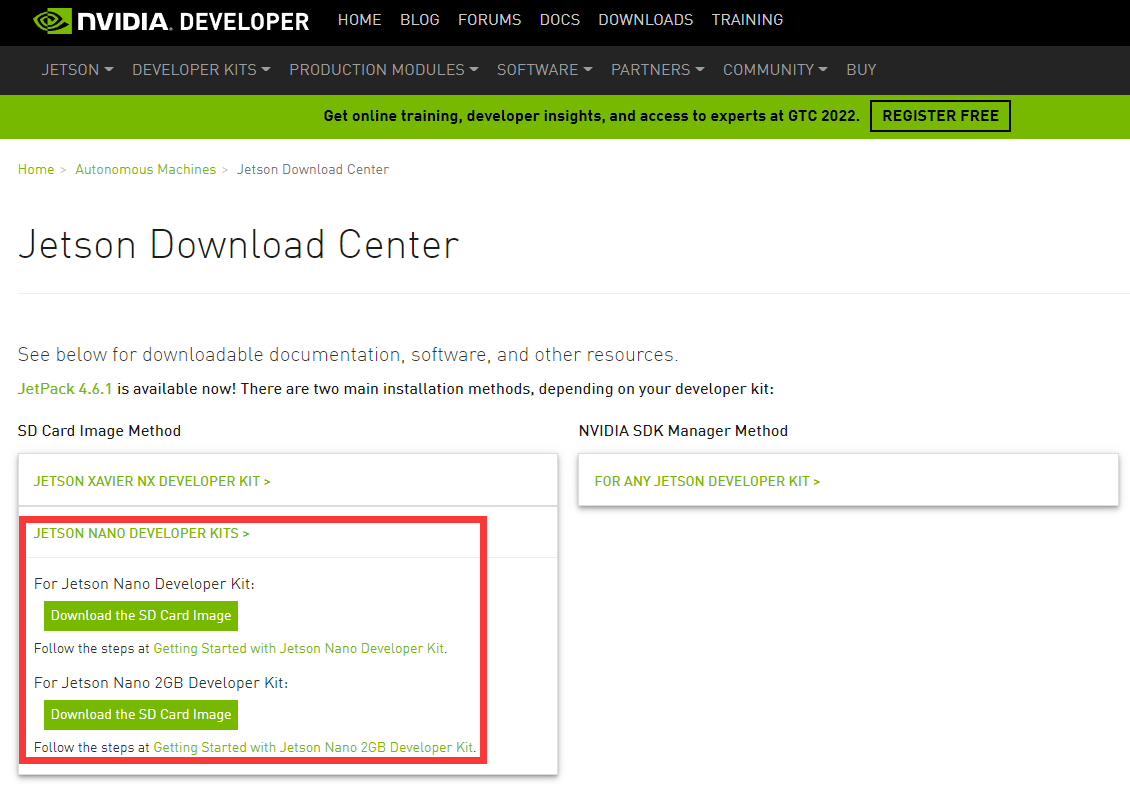
在Jetson Download Center下载镜像:
在树莓派资源下载 | 树莓派实验室下载工具
使用SDFormatter格式化内存卡
使用balenaEtcher烧录镜像
插上TF卡,开机后配置好语言、键盘、wifi、时区和App partition size后会自动重启,此后即可使用SSH远程登陆。
换源
sudo apt-get install nano
sudo nano /etc/apt/sources.list
将 http://ports.ubuntu.com/ 全部替换为中科大的源 http://mirrors.ustc.edu.cn/ubuntu-ports/
执行
sudo apt update
sudo apt upgrade
更新
安装VNC服务
安装x11vnc
sudo apt-get install x11vnc
设置x11vnc密码
x11vnc -storepasswd
#然后按提示输入密码
编写启动脚本
nano startVNC
# !/bin/bash
x11vnc -rfbauth ~/.vnc/passwd -display :0 -forever -bg -repeat -nowf -o ~/.vnc/x11vnc.log -shared &
sudo chmod +x ./startVNC
启动脚本
./startVNC
此后即可通过VNC远程登陆
安装ROS
sudo mkdir -p /etc/apt/sources.list.d/ && sudo touch /etc/apt/sources.list.d/ros-latest.list
sudo sh -c 'echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
sudo apt update -y
sudo apt install aptitude -y
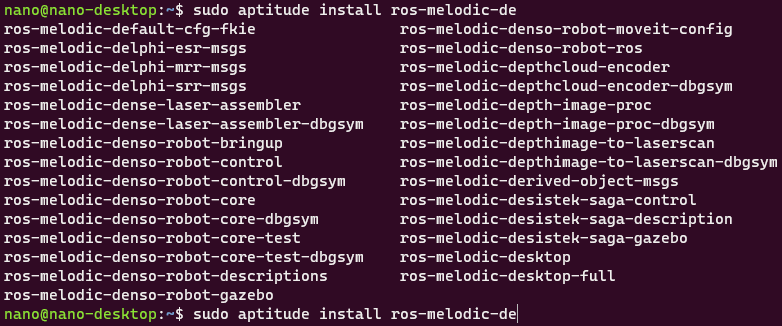
输入sudo aptitude install ros-按住tab补全搜寻有无类似ros-版本代号-desktop-full的安装包,我这里找到了ros-melodic-desktop-full版本的:
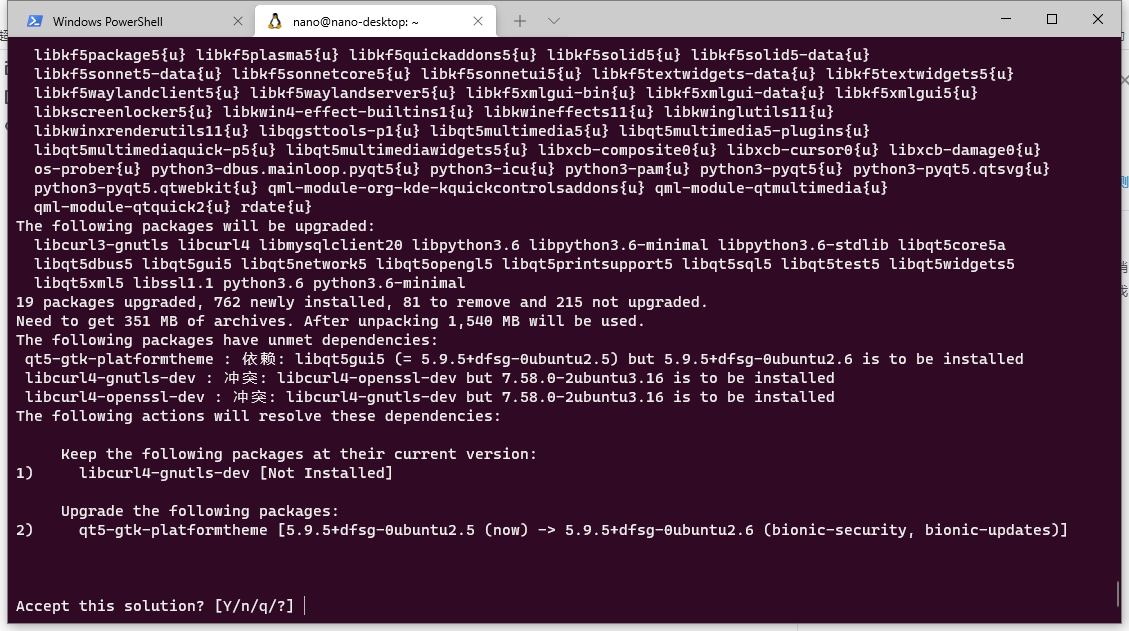
使用如下命令后可能会有不少冲突,尽可能选择安装最全的方案。
sudo aptitude install ros-melodic-desktop-full
初始化rosdep和环境
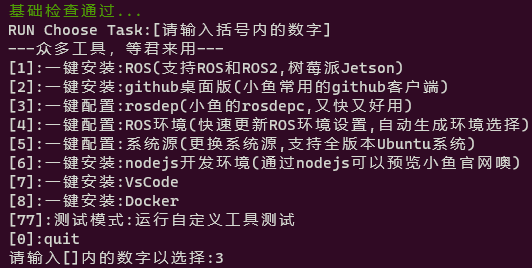
这里使用鱼香ROS大佬的脚本解决rosdep问题,其官网为鱼香ROS
wget http://fishros.com/install -O fishros && . fishros
选择3

rosdepc update
wget http://fishros.com/install -O fishros && . fishros
选择4
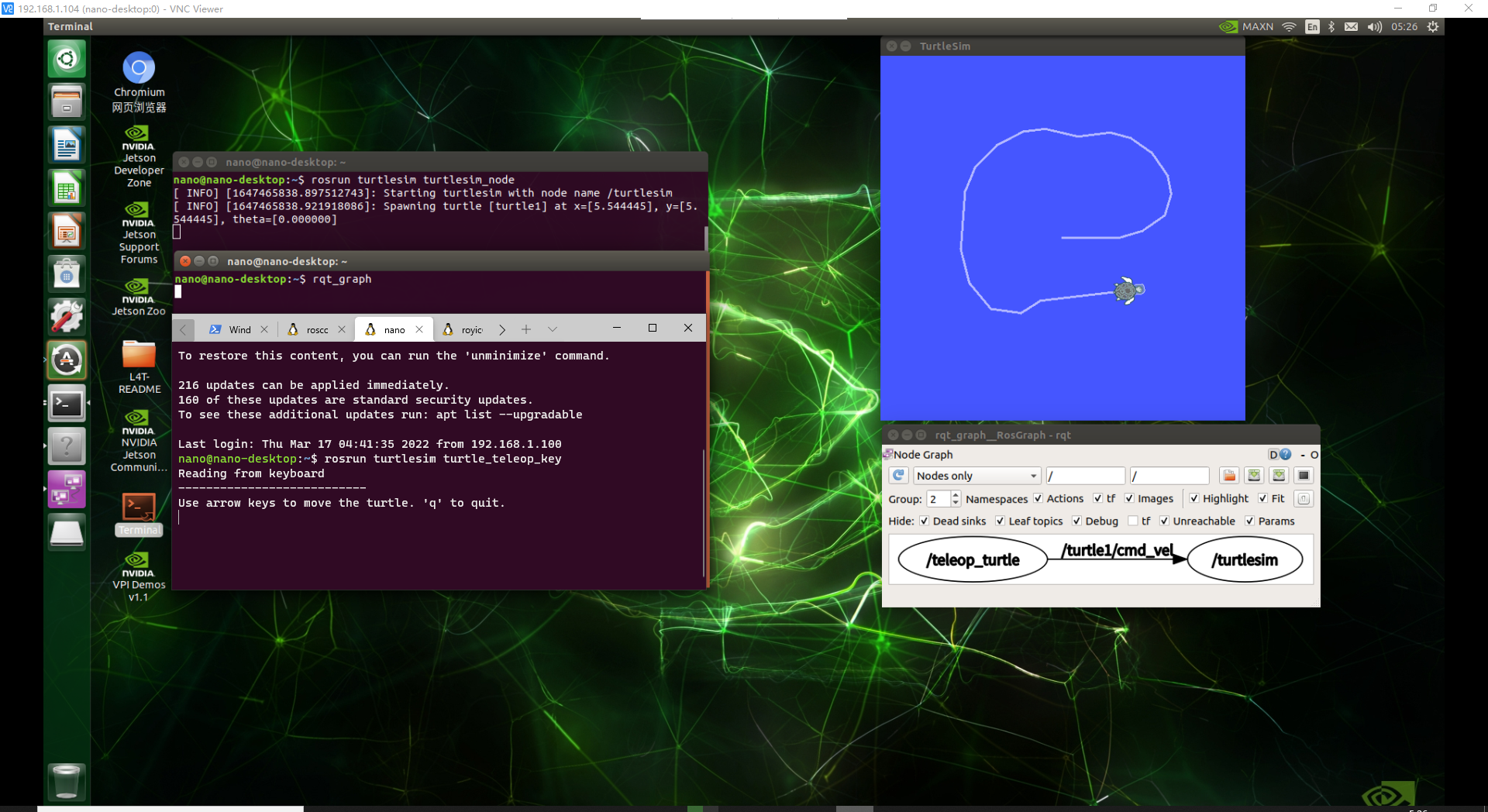
测试
分别在四个终端中使用如下命令
roscore
rosrun turtlesim turtle_teleop_key
以下这个命令需在图形界面的终端中使用
rosrun turtlesim turtlesim_node
rqt_graph
如图所示,已成功运行小乌龟例程
最后
以上就是满意美女最近收集整理的关于【Jetson Nano学习笔记】1. 系统镜像和ROS的安装安装系统换源安装VNC服务安装ROS初始化rosdep和环境测试的全部内容,更多相关【Jetson内容请搜索靠谱客的其他文章。








发表评论 取消回复