决策树
- 信息论基础(熵 联合熵 条件熵 信息增益 基尼不纯度)
- 熵
- 联合熵
- 条件熵
- 信息增益
- 基尼不纯度
- 决策树的不同分类算法(ID3算法、C4.5、CART分类树)的原理及应用场景
- ID3算法
- C4.5
- CART分类树
- 回归树原理
- 决策树防止过拟合手段
- 模型评估
- sklearn参数详解,Python绘制决策树
信息论基础(熵 联合熵 条件熵 信息增益 基尼不纯度)
熵
在引入熵的概念之前,思考一个问题, 抛硬币和投骰子,哪一个不确定性更强?直觉来说,投骰子的不确定性更强,因为有6中可能,而抛硬币只有两种可能(那种说中间的就别杠了)
Shannon提出了熵的概念,解决了以上这个问题。对于上述离散型随机事件,可以用离散熵定义其不确定性

log以2为底。
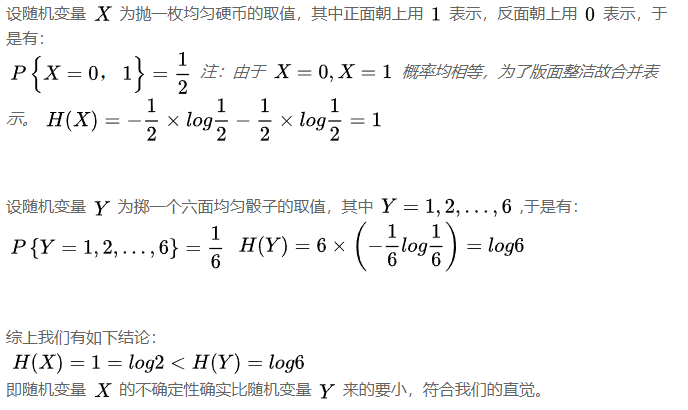
我们可以更进一步地看,一个随机变量的熵越大,意味着不确定性越大,那么也就是说,该随机变量包含的信息量越大,那到底信息量是什么呢?抛一枚硬币的信息量就是,正面朝上,反面朝上,这2就是信息量;同样,掷骰子的信息量就是6个不同数字的面朝上,这6也是信息量。那么,在计算机角度上看,熵到底是什么,在计算机中,要表示抛硬币的结果,需要用1 bit,要表示掷骰子的结果需要用log6 bit(实际表示时为向上取整3 bit),也就是说熵是平均意义上对随机变量的编码长度。
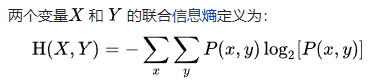
联合熵
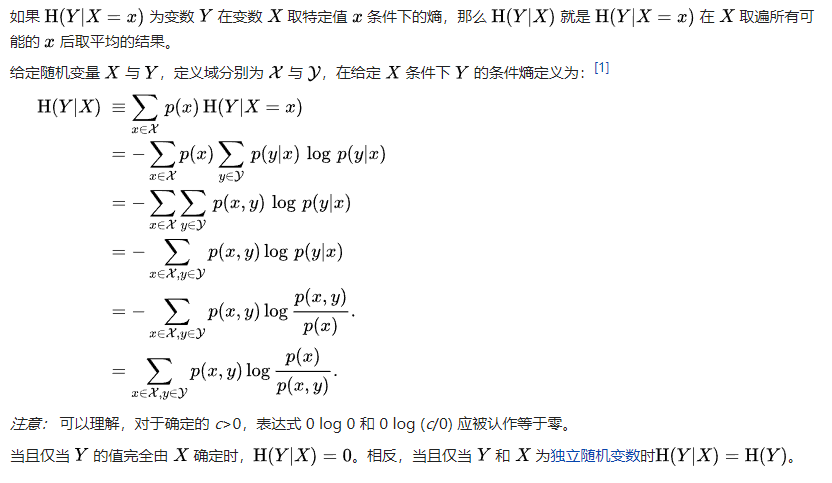
条件熵
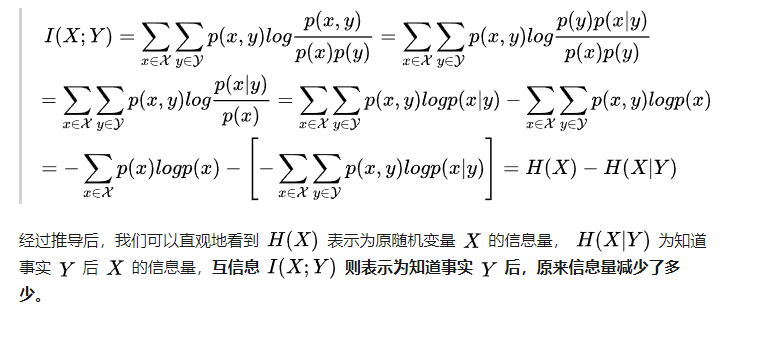
信息增益
熵-条件熵 = 信息增益
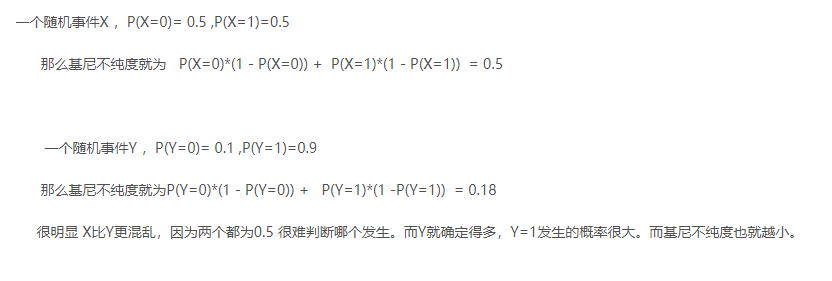
基尼不纯度
从一个数据集中随机选取子项,度量其被错误的划分到其他组里的概率
fi为某概率事件发生的概率

决策树的不同分类算法(ID3算法、C4.5、CART分类树)的原理及应用场景
ID3算法
ID3算法才用信息增益来作为划分的依据, 就是朝着越不混乱的方向进行划分,就是信息增益最大的方向。
举例说明:
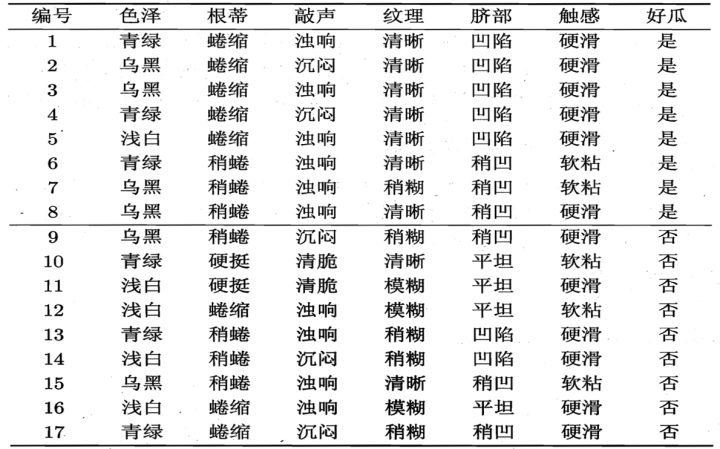
好瓜8/17, 不好瓜9/17, 熵为 -8/17 * log 8/17 - 9/17 * log 9/17 = 0.998
然后计算每个特征的信息增益
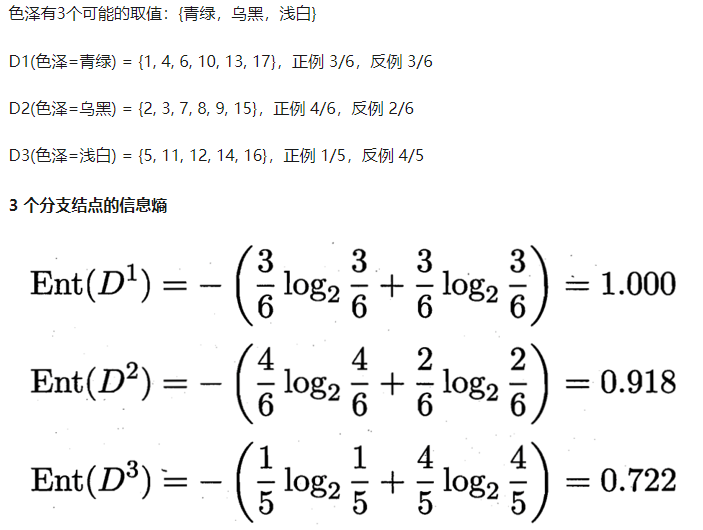
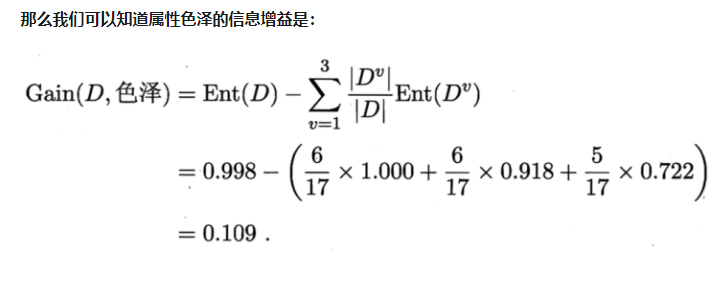
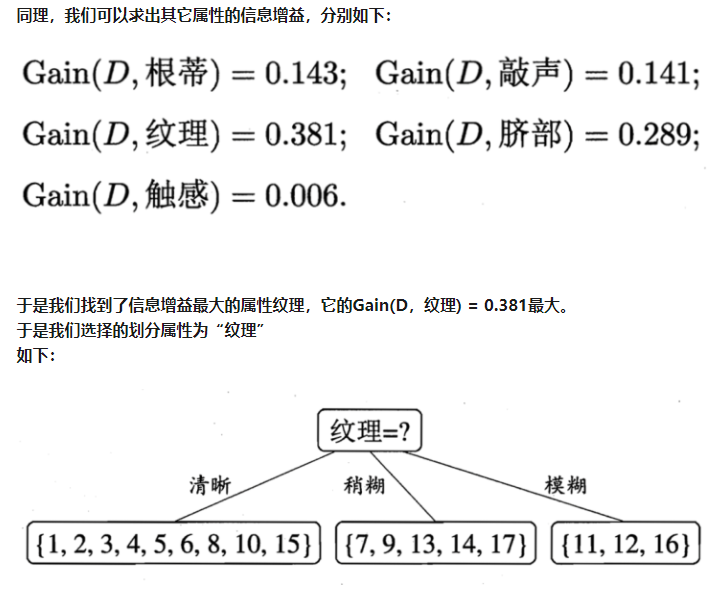
我们从上面求解信息增益的公式中,其实可以看出,信息增益准则其实是对可取值数目较多的属性有所偏好!
现在假如我们把数据集中的“编号”也作为一个候选划分属性。我们可以算出“编号”的信息增益是0.998
因为每一个样本的编号都是不同的(由于编号独特唯一,条件熵为0了,每一个结点中只有一类,纯度非常高啊),也就是说,来了一个预测样本,你只要告诉我编号,其它特征就没有用了,这样生成的决策树显然不具有泛化能力。 为了解决这个问题,就有了下面C4.5的算法
C4.5
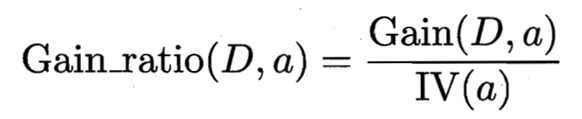
这里我们引入信息增益率这个说法,定义如下
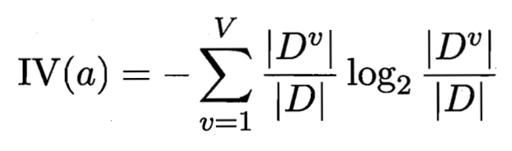
IV(触感) = 0.874 ( V = 2 )
IV(色泽) = 1.580 ( V = 3 )
IV(编号) = 4.088 ( V = 17 )
C4.5算法不直接选择增益率最大的候选划分属性,候选划分属性中找出信息增益高于平均水平的属性(这样保证了大部分好的的特征),再从中选择增益率最高的(又保证了不会出现编号特征这种极端的情况)
CART分类树
CART:classification and regression tree. 这是一个二叉树。
CART中用于选择变量的不纯性度量是Gini指数;
如果目标变量是标称的,并且是具有两个以上的类别,则CART可能考虑将目标类别合并成两个超类别(双化);
如果目标变量是连续的,则CART算法找出一组基于树的回归方程来预测目标变量。
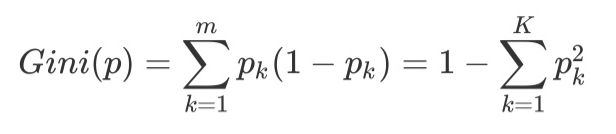
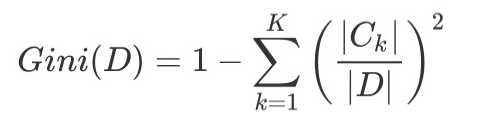
CART分类树预测分类离散型数据,采用基尼指数选择最优特征,同时决定该特征的最优二值切分点。分类过程中,假设有K个类,样本点属于第k个类的概率为Pk,则概率分布的基尼指数定义为
根据基尼指数定义,可以得到样本集合D的基尼指数,其中Ck表示数据集D中属于第k类的样本子集。
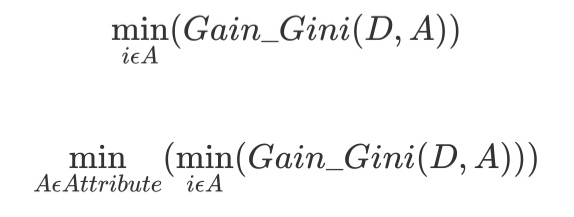
如果数据集D根据特征A在某一取值a上进行分割,得到D1,D2两部分后,那么在特征A下集合D的基尼系数如下所示。其中基尼系数Gini(D)表示集合D的不确定性,基尼系数Gini(D,A)表示A=a分割后集合D的不确定性。基尼指数越大,样本集合的不确定性越大。

对于属性A,分别计算任意属性值将数据集划分为两部分之后的Gain_Gini,选取其中的最小值,作为属性A得到的最优二分方案。然后对于训练集S,计算所有属性的最优二分方案,选取其中的最小值,作为样本及S的最优二分方案。
举个例子
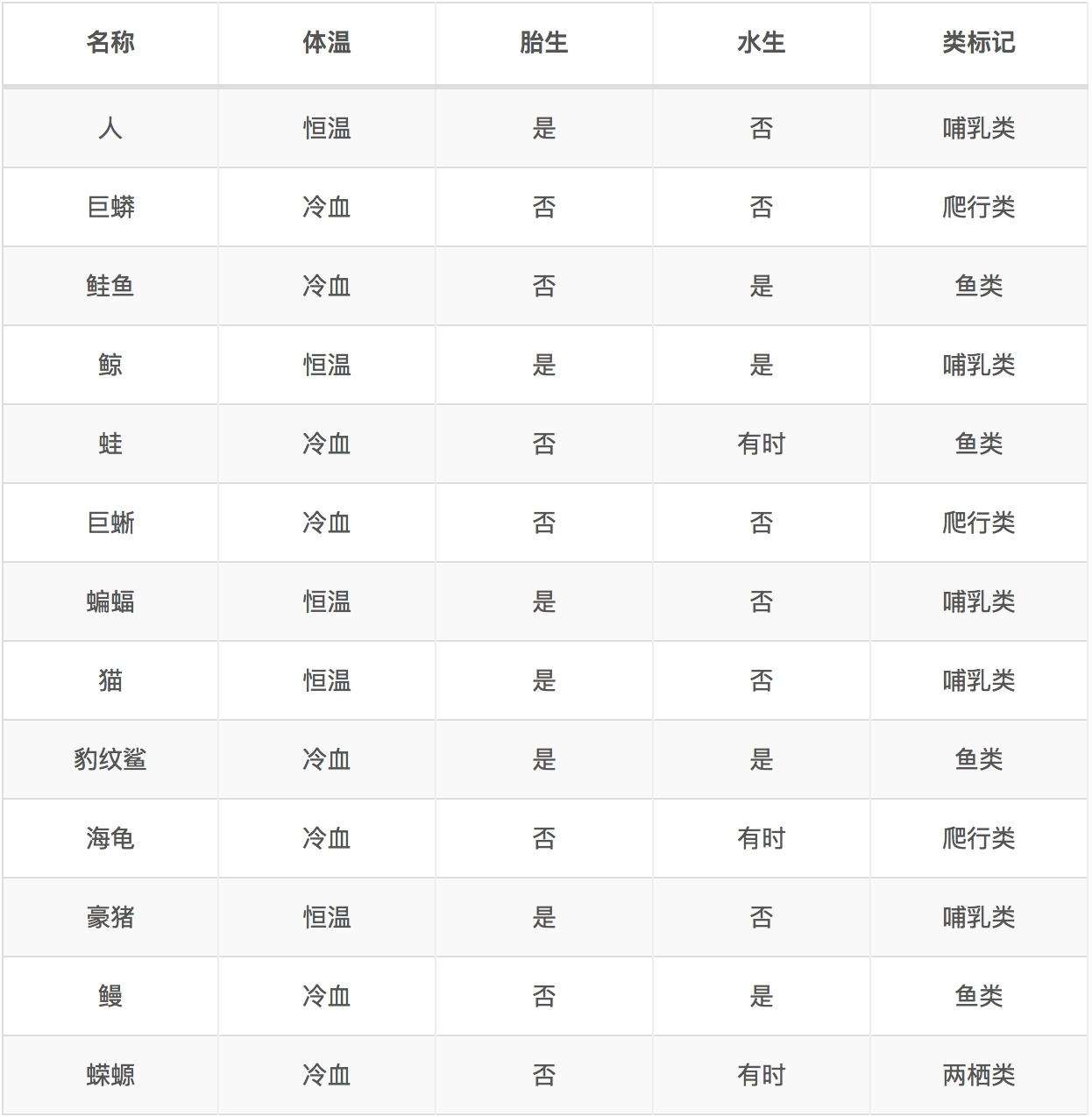
针对上述离散型数据,按照体温为恒温和非恒温进行划分。其中恒温时包括哺乳类5个、鸟类2个,非恒温时包括爬行类3个、鱼类3个、两栖类2个,如下所示我们计算D1,D2的基尼指数。
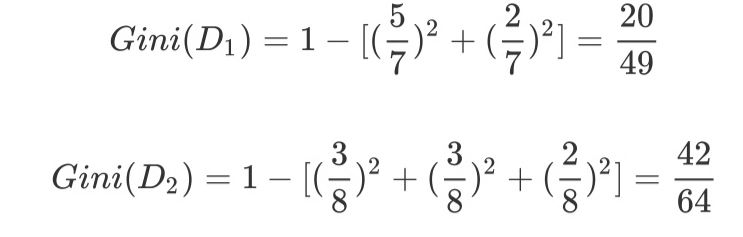

然后对每个特征都计基尼系数, 最后选择基尼系数最小的特征和相应的划分
PS。 如果特征多有离散的特征值如(young, middle, old) 会有如下划分
{(‘young’), (‘middle’, ‘old’)}
{(‘middle’), (‘young’, ‘old’)}
{(‘old’), (‘middle’, ‘young’)}
如果有4个离散值,就有7种划分可能。
如果有5个离散值,就有15种划分可能。
所以,如果特征里面离散值过多的话,是不太适合用CART的
对于连续性特征问题,其实有限数据,也可以视为多特征的离散值。
将数据排序,然后根据指定点切分。 总共有N-1种切分。 然后算基尼系数最小的就可以了
回归树原理
区别于分类树,回归树的待预测结果为连续型数据。同时,区别于分类树选取Gain_GINI为评价分裂属性的指标,回归树选取Gain_σ为评价分裂属性的指标。选择具有最小Gain_σ属性及其属性值,作为最优分裂属性以及最优分裂属性值。Gain_σ值越小,说明二分之后的子样本的“差异性”越小,说明选择该属性(值)作为分裂属性(值)的效果越好。
其中,μ表示样本集S中预测结果的均值,yk表示第k个样本。 可以这么理解。把数据分在一个箱子里面,然后用箱子的均值就是预测值。这个就是方差了。 回归树就是争取做到方差最小(就是与实际值越接近)
试着想一下,如果总共有100条数据,分了100个箱子, 那均值 = 自身。 方差为0
决策树防止过拟合手段
上面说的100条数据,分100个箱子,也就是过拟合状态了。 理论上一直分一直分, 可以得到方差为0的决策树。
避免这个问题就要对树进行剪枝了。
由于时间关系,请各位大侠参考这篇文章
https://blog.csdn.net/zhengzhenxian/article/details/79083643
模型评估
混淆矩阵
AOC
ROC
sklearn参数详解,Python绘制决策树
参数含义:
-
criterion:string, optional (default=“gini”)
(1).criterion='gini',分裂节点时评价准则是Gini指数。 (2).criterion='entropy',分裂节点时的评价指标是信息增益。 -
max_depth:int or None, optional (default=None)。指定树的最大深度。
如果为None,表示树的深度不限。直到所有的叶子节点都是纯净的,即叶子节点 中所有的样本点都属于同一个类别。或者每个叶子节点包含的样本数小于min_samples_split。 -
splitter:string, optional (default=“best”)。指定分裂节点时的策略。
(1).splitter='best',表示选择最优的分裂策略。 (2).splitter='random',表示选择最好的随机切分策略。 -
min_samples_split:int, float, optional
(default=2)。表示分裂一个内部节点需要的做少样本数。(1).如果为整数,则min_samples_split就是最少样本数。 (2).如果为浮点数(0到1之间),则每次分裂最少样本数为ceil(min_samples_split * n_samples) -
min_samples_leaf: int, float, optional (default=1)。指定每个叶子节点需要的最少样本数。
(1).如果为整数,则min_samples_split就是最少样本数。 (2).如果为浮点数(0到1之间),则每个叶子节点最少样本数为ceil(min_samples_leaf * n_samples) -
min_weight_fraction_leaf:float, optional (default=0.)
指定叶子节点中样本的最小权重。 -
max_features:int, float, string or None, optional (default=None).
搜寻最佳划分的时候考虑的特征数量。 (1).如果为整数,每次分裂只考虑max_features个特征。 (2).如果为浮点数(0到1之间),每次切分只考虑int(max_features * n_features)个特征。 (3).如果为'auto'或者'sqrt',则每次切分只考虑sqrt(n_features)个特征 (4).如果为'log2',则每次切分只考虑log2(n_features)个特征。 (5).如果为None,则每次切分考虑n_features个特征。 (6).如果已经考虑了max_features个特征,但还是没有找到一个有效的切分,那么还会继续寻找 下一个特征,直到找到一个有效的切分为止。 -
random_state:int, RandomState instance or None, optional
(default=None)(1).如果为整数,则它指定了随机数生成器的种子。 (2).如果为RandomState实例,则指定了随机数生成器。 (3).如果为None,则使用默认的随机数生成器。 -
max_leaf_nodes: int or None, optional (default=None)。指定了叶子节点的最大数量。
(1).如果为None,叶子节点数量不限。 (2).如果为整数,则max_depth被忽略。 -
min_impurity_decrease:float, optional (default=0.)
如果节点的分裂导致不纯度的减少(分裂后样本比分裂前更加纯净)大于或等于min_impurity_decrease,则分裂该节点。
加权不纯度的减少量计算公式为:
min_impurity_decrease=N_t / N * (impurity - N_t_R / N_t * right_impurity
- N_t_L / N_t * left_impurity)
其中N是样本的总数,N_t是当前节点的样本数,N_t_L是分裂后左子节点的样本数,
N_t_R是分裂后右子节点的样本数。impurity指当前节点的基尼指数,right_impurity指
分裂后右子节点的基尼指数。left_impurity指分裂后左子节点的基尼指数。 -
min_impurity_split:float
树生长过程中早停止的阈值。如果当前节点的不纯度高于阈值,节点将分裂,否则它是叶子节点。
这个参数已经被弃用。用min_impurity_decrease代替了min_impurity_split。 -
class_weight:dict, list of dicts, “balanced” or None, default=None
类别权重的形式为{class_label: weight}
(1).如果没有给出每个类别的权重,则每个类别的权重都为1。
(2).如果class_weight=‘balanced’,则分类的权重与样本中每个类别出现的频率成反比。
计算公式为:n_samples / (n_classes * np.bincount(y))
(3).如果sample_weight提供了样本权重(由fit方法提供),则这些权重都会乘以sample_weight。 -
presort:bool, optional (default=False)
指定是否需要提前排序数据从而加速训练中寻找最优切分的过程。设置为True时,对于大数据集
会减慢总体的训练过程;但是对于一个小数据集或者设定了最大深度的情况下,会加速训练过程。
最后
以上就是魁梧路灯最近收集整理的关于决策树信息论基础(熵 联合熵 条件熵 信息增益 基尼不纯度)决策树的不同分类算法(ID3算法、C4.5、CART分类树)的原理及应用场景回归树原理决策树防止过拟合手段模型评估sklearn参数详解,Python绘制决策树的全部内容,更多相关决策树信息论基础(熵内容请搜索靠谱客的其他文章。








发表评论 取消回复