首先,上参考网址:
http://wiki.ros.org/Robots/TIAGo
http://wiki.ros.org/teleop_twist_keyboard
第一个,使用TIAGo的gazebo例子;
第二个,是通用的键盘控制例子,使用时需要改动一下。
具体如下:
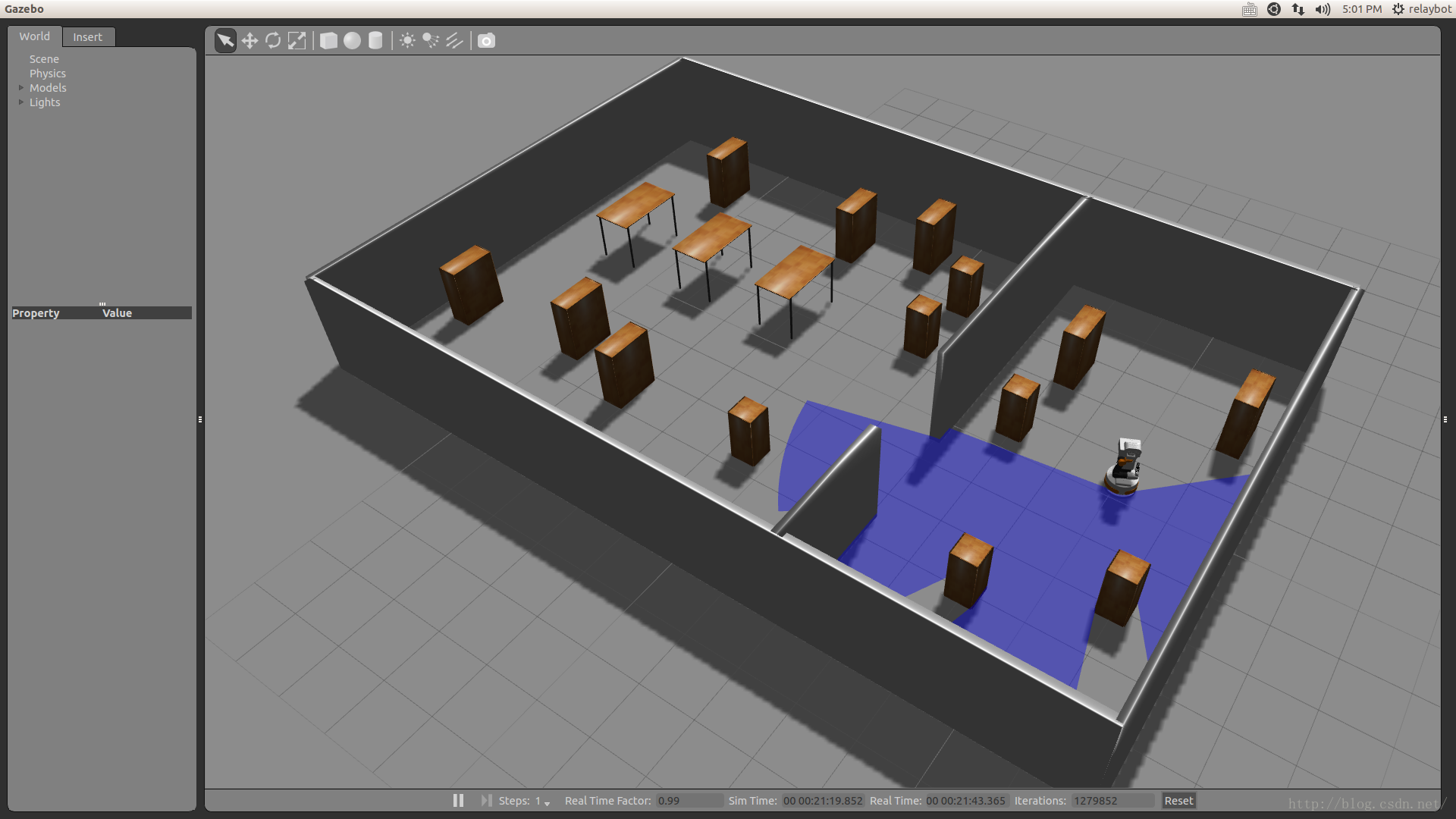
$ roslaunch tiago_gazebo tiago_gazebo.launch world:=small_office
可见:
如果没有官方要求的手柄会报错:
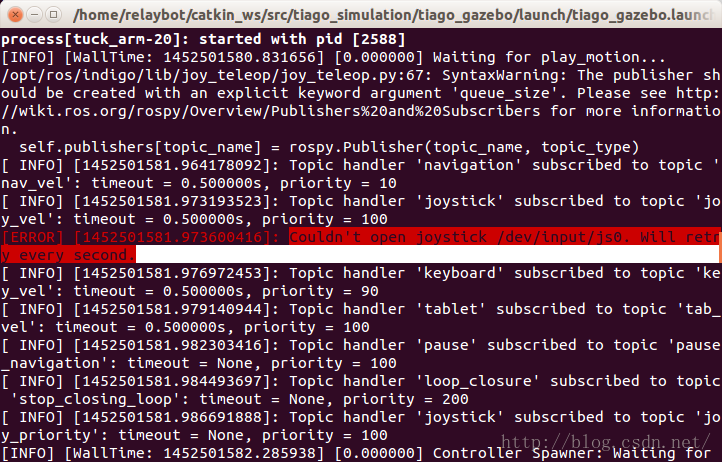
这里用键盘控制,可以忽略。
键入如下命令:
$ rostopic list
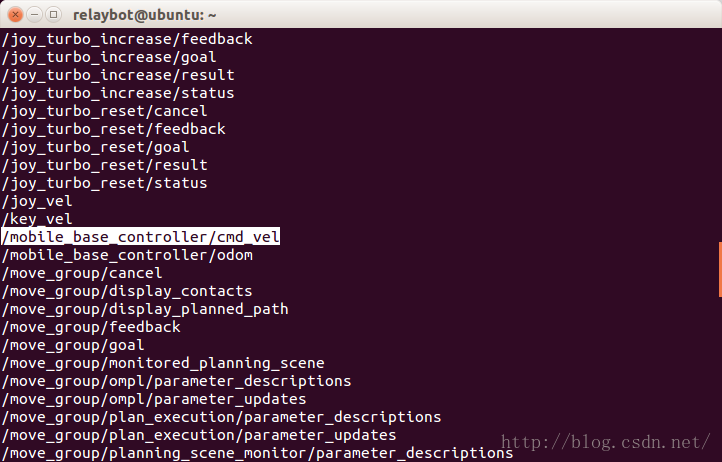
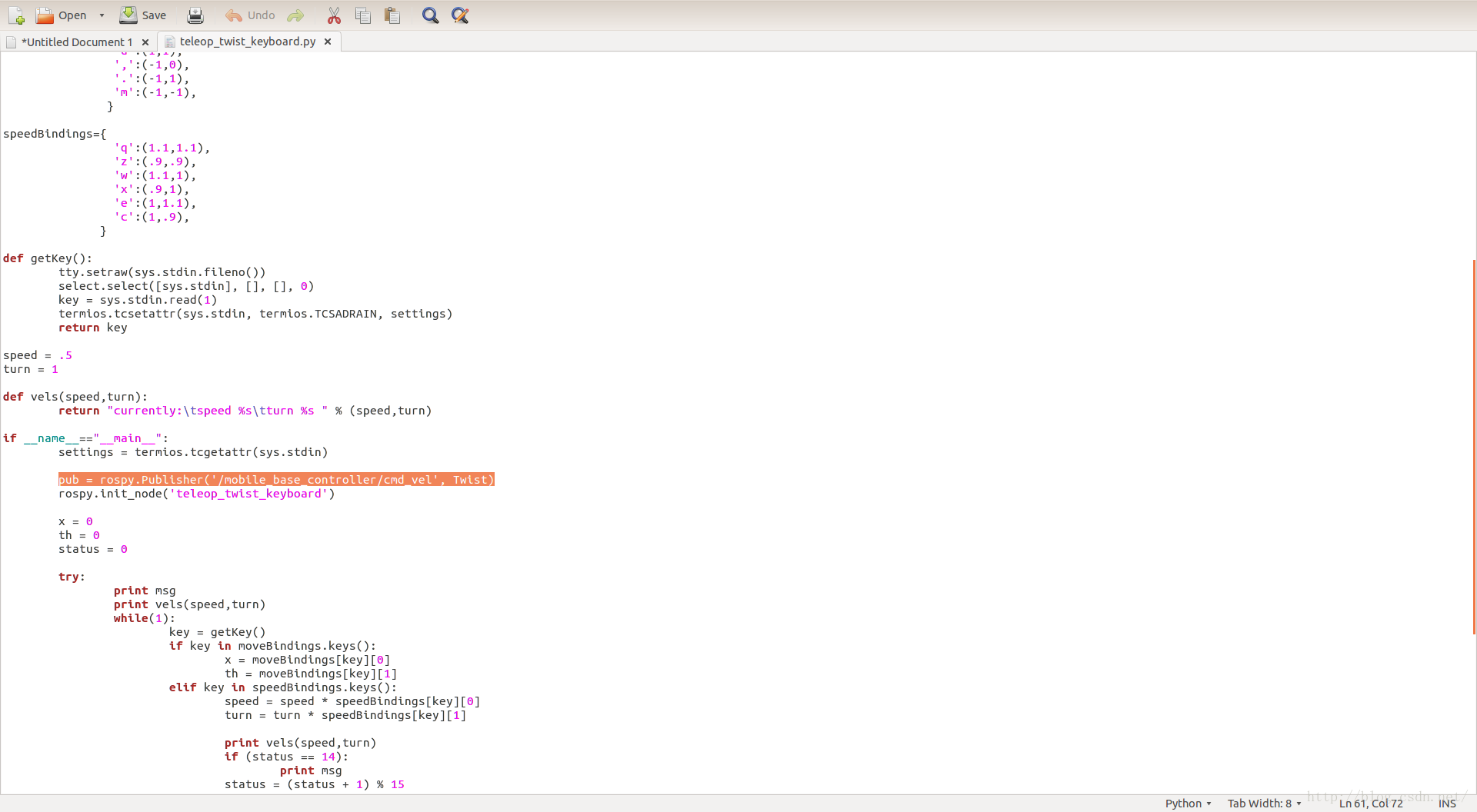
修改teleop_twist_keyboard.py,注意选中部分,这里只是控制机器人底盘,其他部件自行修改:
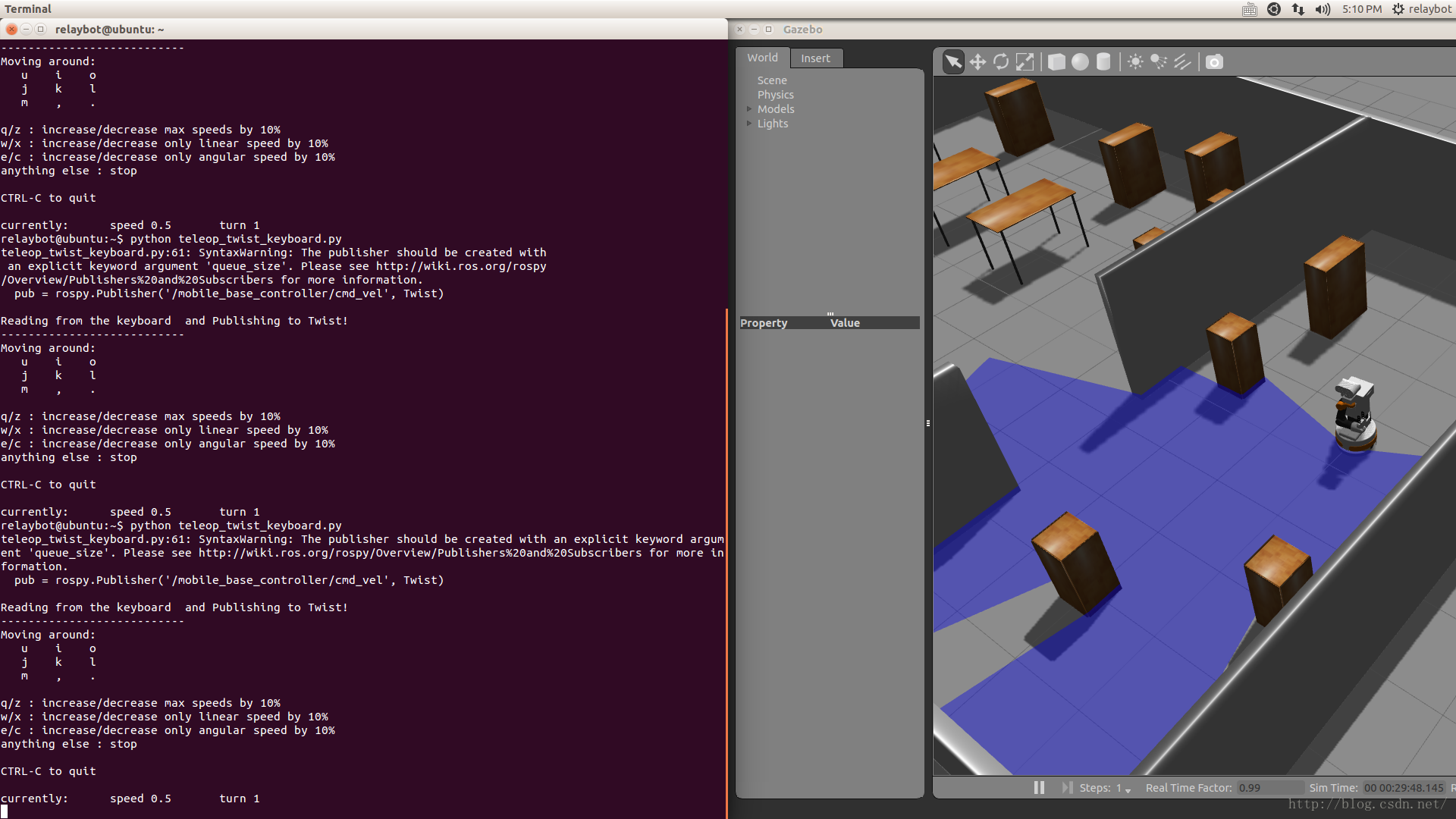
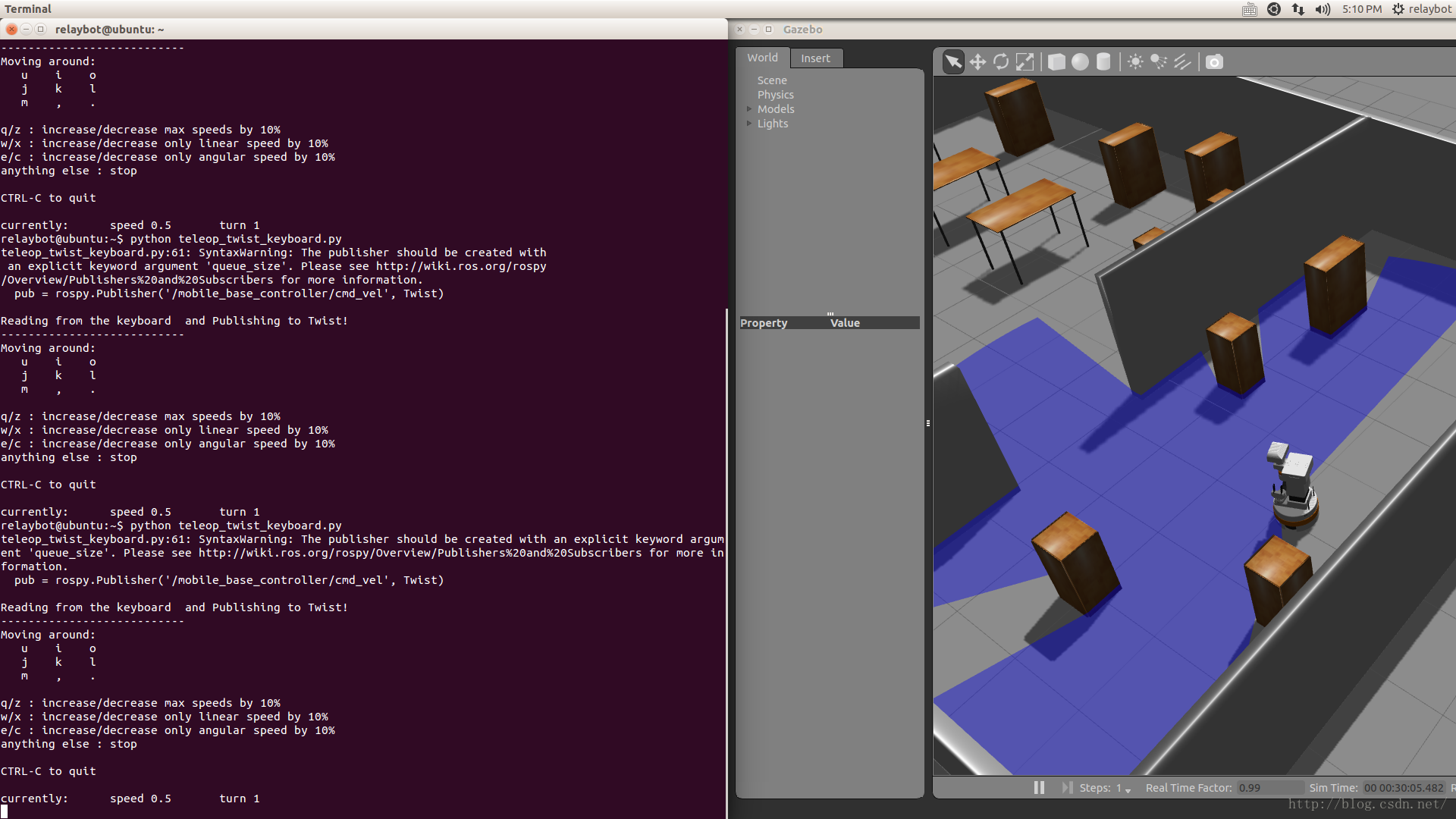
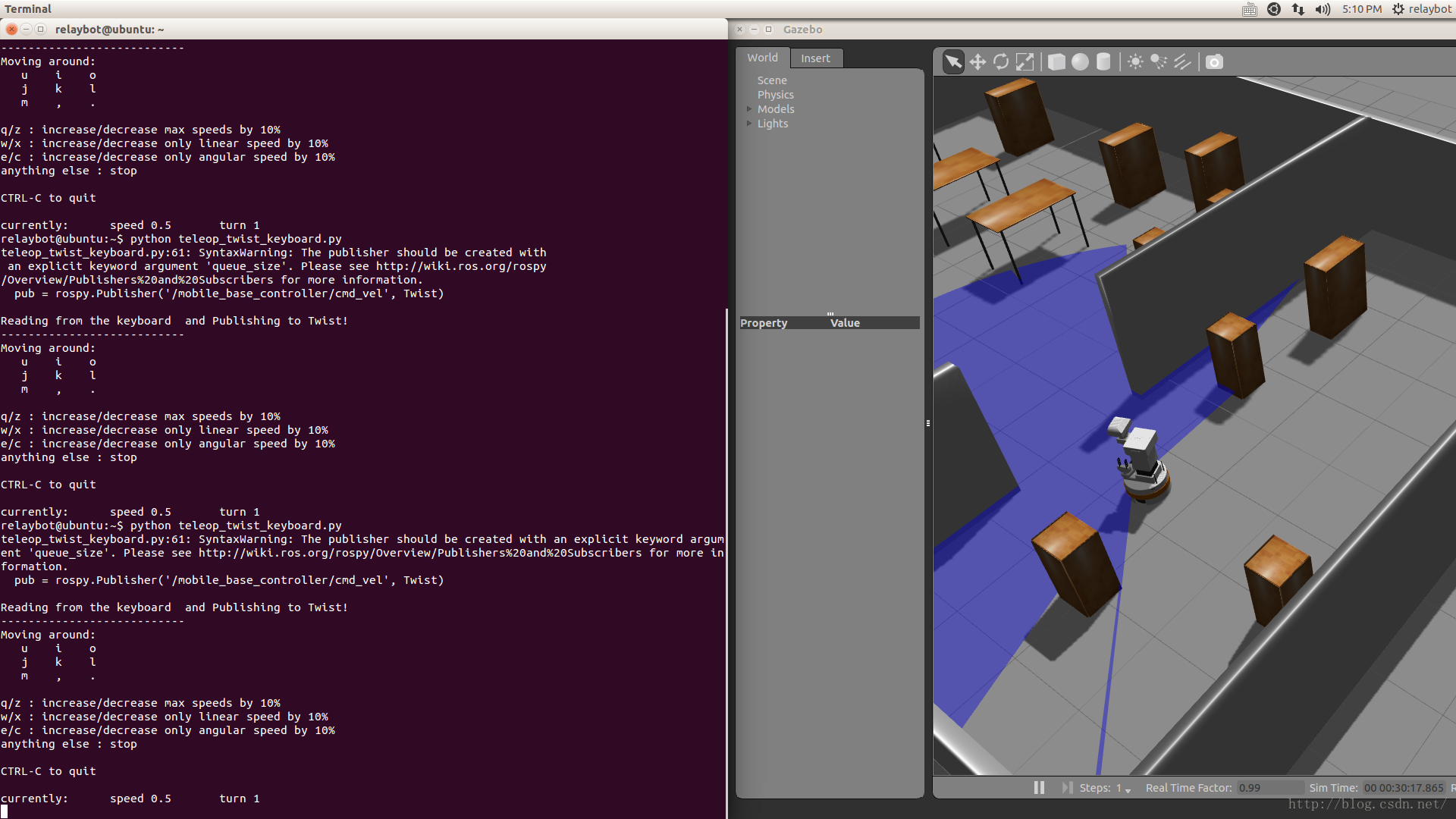
新启动一个终端,启动刚才修改过的代码:
$ python teleop_twist_keyboard.py
这时就可以用键盘控制机器人运动了,当然通过修改也可以直接控制实际机器人等,例如通过Arduino输出pwm,控制电机运动。
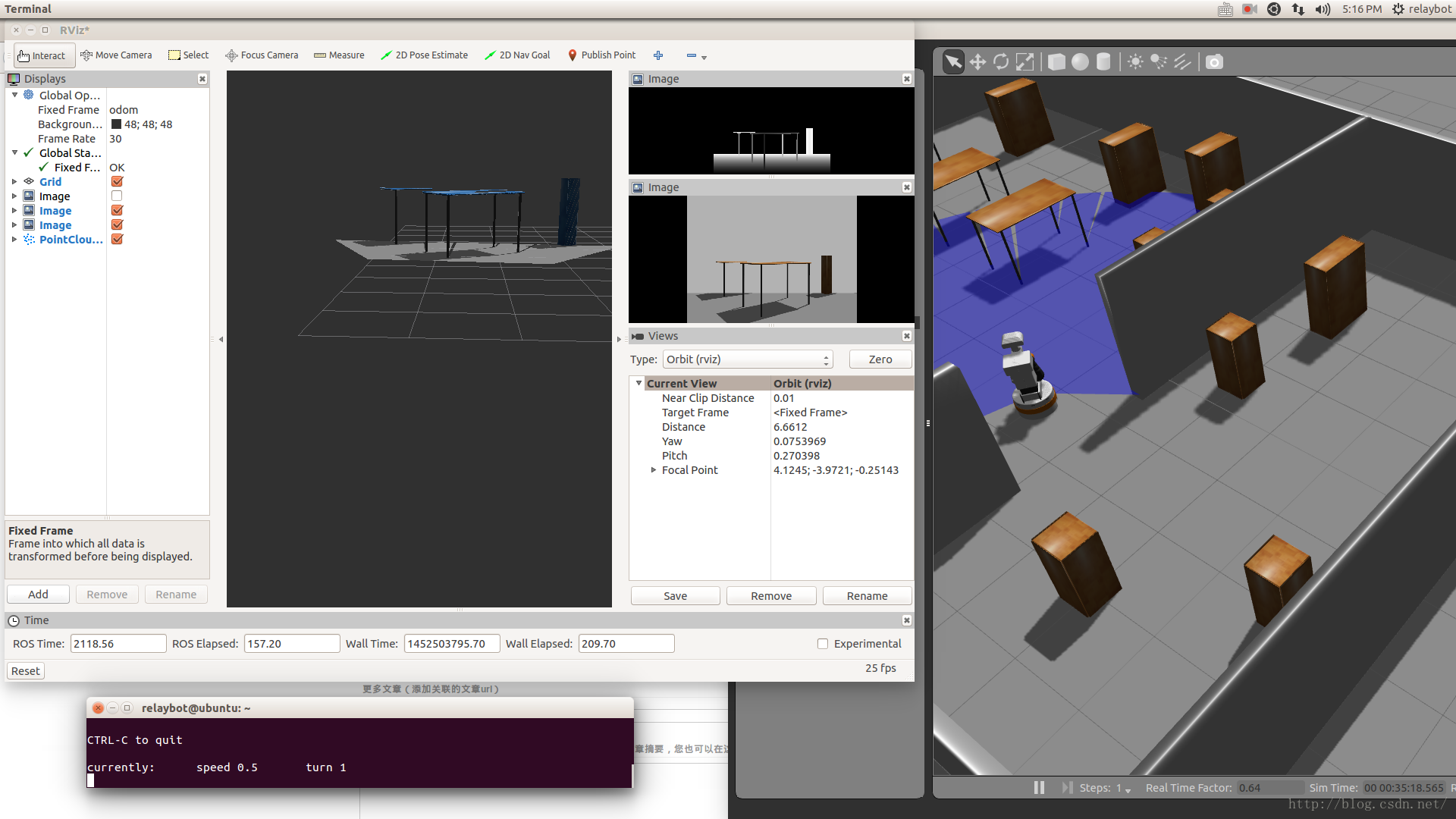
具体视频录像可以参考:
http://v.youku.com/v_show/id_XMTQ0MjIxMzY0MA
最后
以上就是文静咖啡最近收集整理的关于ros_indigo使用keyboard键盘控制虚拟或实际机器人的全部内容,更多相关ros_indigo使用keyboard键盘控制虚拟或实际机器人内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复