7.5 三角测量
-
上节通过对极几何约束获得了相机的运动。
本节运用相机运动获得特征点空间位置。 -
通过单张图像无法获得图像的深度信息。用三角测量估计深度(比较容易理解)
-
红线是O1相机的像素p1对应的所有可能点。蓝线是O2相机像素p2对应的所有可能点。两像素在照片上是同一位置。因此理论上应该交于一点,这个点就是P的空间位置。
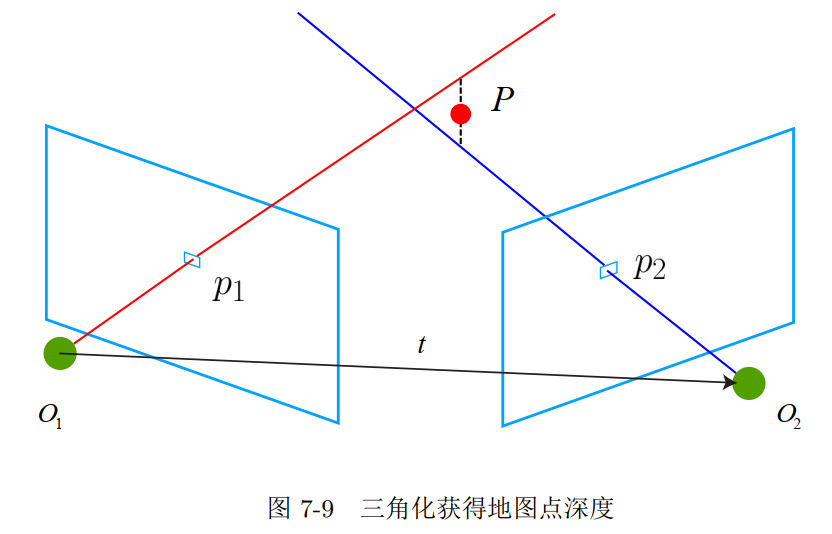
由于噪声影响,两个点无法相交,因此求一个最可能的解。
经过一系列操作解出 X1和X2 。
书中X1 和X2 为特征点的归一化坐标,是一个列向量。
程序:
程序中给出了一个新的函数,triangulation。
函数理解:
输入特征点,匹配向量,输出每两个匹配特征点对应的3D坐标。
void triangulation (
const vector< KeyPoint >& keypoint_1,
const vector< KeyPoint >& keypoint_2,
const std::vector< DMatch >& matches,
const Mat& R, const Mat& t,
vector< Point3d >& points )
// 参数包括关键点,匹配向量,矩阵R t
{
Mat T1 = (Mat_<float> (3,4) <<
1,0,0,0,
0,1,0,0,
0,0,1,0);
Mat T2 = (Mat_<float> (3,4) <<
R.at<double>(0,0), R.at<double>(0,1), R.at<double>(0,2), t.at<double>(0,0),
R.at<double>(1,0), R.at<double>(1,1), R.at<double>(1,2), t.at<double>(1,0),
R.at<double>(2,0), R.at<double>(2,1), R.at<double>(2,2), t.at<double>(2,0)
);
这儿的T1 和 T2 如果说是转移矩阵的话应该是 4*4 的。所以不是
看程序后面有个opencv函数 cv::triangulatePoints( T1, T2, pts_1, pts_2, pts_4d ); 这个函数的输入是3*4 的。
Mat K = ( Mat_<double> ( 3,3 ) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1 ); 相机内参
vector<Point2f> pts_1, pts_2;
for ( DMatch m:matches )
{
// 将像素坐标转换至相机坐标
pts_1.push_back ( pixel2cam( keypoint_1[m.queryIdx].pt, K) );
pts_2.push_back ( pixel2cam( keypoint_2[m.trainIdx].pt, K) );
}
Mat pts_4d;
cv::triangulatePoints( T1, T2, pts_1, pts_2, pts_4d );
// 转换成非齐次坐标
for ( int i=0; i<pts_4d.cols; i++ )
{
Mat x = pts_4d.col(i);
x /= x.at<float>(3,0); // 归一化
Point3d p (
x.at<float>(0,0),
x.at<float>(1,0),
x.at<float>(2,0)
);
points.push_back( p );
}
}
在主函数中应用:
//-- 三角化
vector<Point3d> points;
triangulation( keypoints_1, keypoints_2, matches, R, t, points );
//-- 验证三角化点与特征点的重投影关系
Mat K = ( Mat_<double> ( 3,3 ) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1 );
for ( int i=0; i<matches.size(); i++ )
// 对每个匹配点进行验证。 输出每张图的每个匹配像素在图中的位置和从计算出的P点投影到图像中的位置。
// 若没有噪声,两个点应该重合。
最后
以上就是花痴秋天最近收集整理的关于三角测量7.5 三角测量的全部内容,更多相关三角测量7.5内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复