标定参数:两轮半径,两轮间距
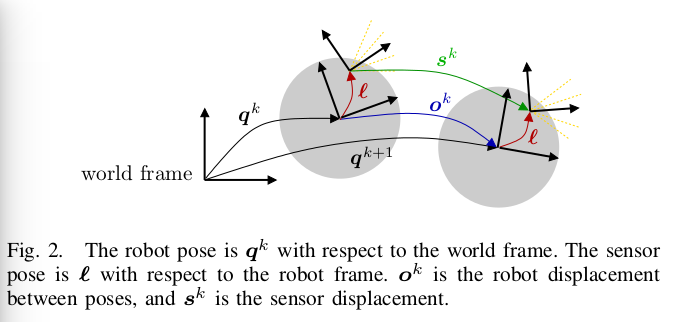
,传感器相对于机器人坐标系的位姿
运动学模型:
其中:
假定在每次采样间隔内轮子速度恒定
假设,通过积分即可得到每个采样时刻的位姿
估计:
基于机器人旋转的角度和传感器旋转的角度
相同的原理。由激光匹配得到的角度估计为
,里程计观测到的角度
。
所有时刻整合:
可以从上式中估计出来。
由于,因此还需估计
。
估计:
由图可知:,展开:
其中已经估计出来。
将用其他参数表示:
将(12)代入(5-6)得到:
其中:
将(13)代入(10)(11)中:
定义:,额外约束:
。
那么(14)(15)写成矩阵形式:
定义:,解最小二乘问题:
由于对于任意解,
同样是解。因此增加额外约束:
求解带约束的最小二乘问题:
使用拉格朗日乘子,将(18)约束写为矩阵形式:
约束(19)暂时忽略,近采用当出现负值时跳过。
使用拉格朗日乘子方法,有:
求解:
有比较特殊的结构:
是二次多项式
,其中:
由此求得。
对于任意核空间的任意向量
,考虑(18)(19)约束,得到:
最终标定参数为:
参考链接:
https://blog.csdn.net/heyijia0327/article/details/85000943 贺博提供了代码
https://blog.csdn.net/qq_17032807/article/details/92613892 论文翻译
最后
以上就是无私大白最近收集整理的关于同时标定激光和里程计的全部内容,更多相关同时标定激光和里程计内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复