tools
- ubuntu, intall it and then learn about cmake, bash, vim, qt(optional), only the fundamental functions are required.
- OpenCV. install it, and then read the opencv reference manual and tutorial
- ros, install, tutorial.
- python. 可以使用pycharm,作为IDE.
- caffe(optional).
net adout UAV
- ardupliot
- px4
- dji
ros usually used pakcage
- dji onboard sdk
- mavros
- svo
- orb slam
- ar_tracker_alvar githun page ros page
ros books
- Learning ROS for Robotics Programming
- 机器人操作系统(ROS)浅析
SLAM基础学习
- Multiple View Geometry in Computer Vision。这本书基本涵盖了Vision-based SLAM这个领域的全部理论基础!读多少遍都不算多!另外建议配合Berkeley的课件学习。(更新:这本书书后附录也可以一并读完,包括附带bundle adjustment最基本的levenberg marquardt方法,newton方法等).TUM(慕尼黑工大)有一个公开课,非常好,可以听一听,视频在这里
- Sparse Matrix,这是大型稀疏矩阵处理的一般办法。可以参考Dr. Tim Davis的课件:Tim Davis ,他的主页里有全部的课程视频和Project。针对SLAM问题,最常用的least square算法是Sparse Levenberg Marquardt algorithm,这里有一份开源的代码以及具体实现的paper:Sparse Non-Linear Least Squares in C/C++
- openSLAM
- dataset tum
- PCL
- opencv
推荐阅读的书
- Multiple View Geometry in Computer Vision
- Probabilistic Robotics pdf
- state estimation for Robotics
- Quaternion kinematics for the error-state KF
paper about UAV
foundamental
- [tutorial] Modeling, Estimation, and Control of Quadrotor
- A Fully Autonomous Indoor Quadrotor
- PIXHAWK A Micro Aerial Vehicle Design for
- An Open-Source Hardware_Software Architecture for Quadrotor UAVs
- Build Your Own Quadrotor Open-Source Projects on Unmanned Aerial Vehicles
- The evolution of robotics research
- Developing a ROS Enabled Full Autonomous Quadrotor
- The Navigation and Control technology inside the AR.Drone
- Learning ROS for Robotics Programming
- Toward a fully autonomousUAV–Research Platform for Indoor and Outdoor
- Vision-Controlled flying robotFrom System Design to Autonomous Navigation
vision Navigation
- A Kalman Filter-Based Algorithm for IMU-Camera Calibration Observability Analysis and Performance Evaluation
- SVO- Fast Semi-Direct Monocular Visual Odometry
- eth zasl sensor,
- Stephan Weiss. Vision Based Navigation for Micro Helicopters PhD Thesis, 2012 pdf
- Stephan Weiss, Markus W. Achtelik, Margarita Chli and Roland Siegwart. Versatile Distributed Pose Estimation and Sensor Self-Calibration for Autonomous MAVs. in IEEE International Conference on Robotics and Automation (ICRA), 2012. pdf
- Stephan Weiss, Davide Scaramuzza and Roland Siegwart, Monocular-SLAM–based navigation for autonomous micro helicopters in GPS-denied environments, Journal of Field Robotics (JFR), Vol. 28, No. 6, 2011, 854-874. pdf
- Stephan Weiss and Roland Siegwart. Real-Time Metric State Estimation for Modular Vision-Inertial Systems. in IEEE International Conference on Robotics and Automation (ICRA), 2011. pdf
- Simon Lynen, Markus Achtelik, Stephan Weiss, Margarita Chli and Roland Siegwart, A Robust and Modular Multi-Sensor Fusion Approach Applied to MAV Navigation. in Proc. of the IEEE/RSJ Conference on - - Intelligent Robots and Systems (IROS), 2013. pdf
- [orb slam]
- Raúl Mur-Artal, J. M. M. Montiel and Juan D. Tardós. ORB-SLAM: A Versatile and Accurate Monocular SLAM System. IEEE Transactions on Robotics, vol. 31, no. 5, pp. 1147-1163, 2015. (2015 IEEE Transactions on Robotics Best Paper Award). PDF.
- Dorian Gálvez-López and Juan D. Tardós. Bags of Binary Words for Fast Place Recognition in Image Sequences. IEEE Transactions on Robotics, vol. 28, no. 5, pp. 1188-1197, 2012.
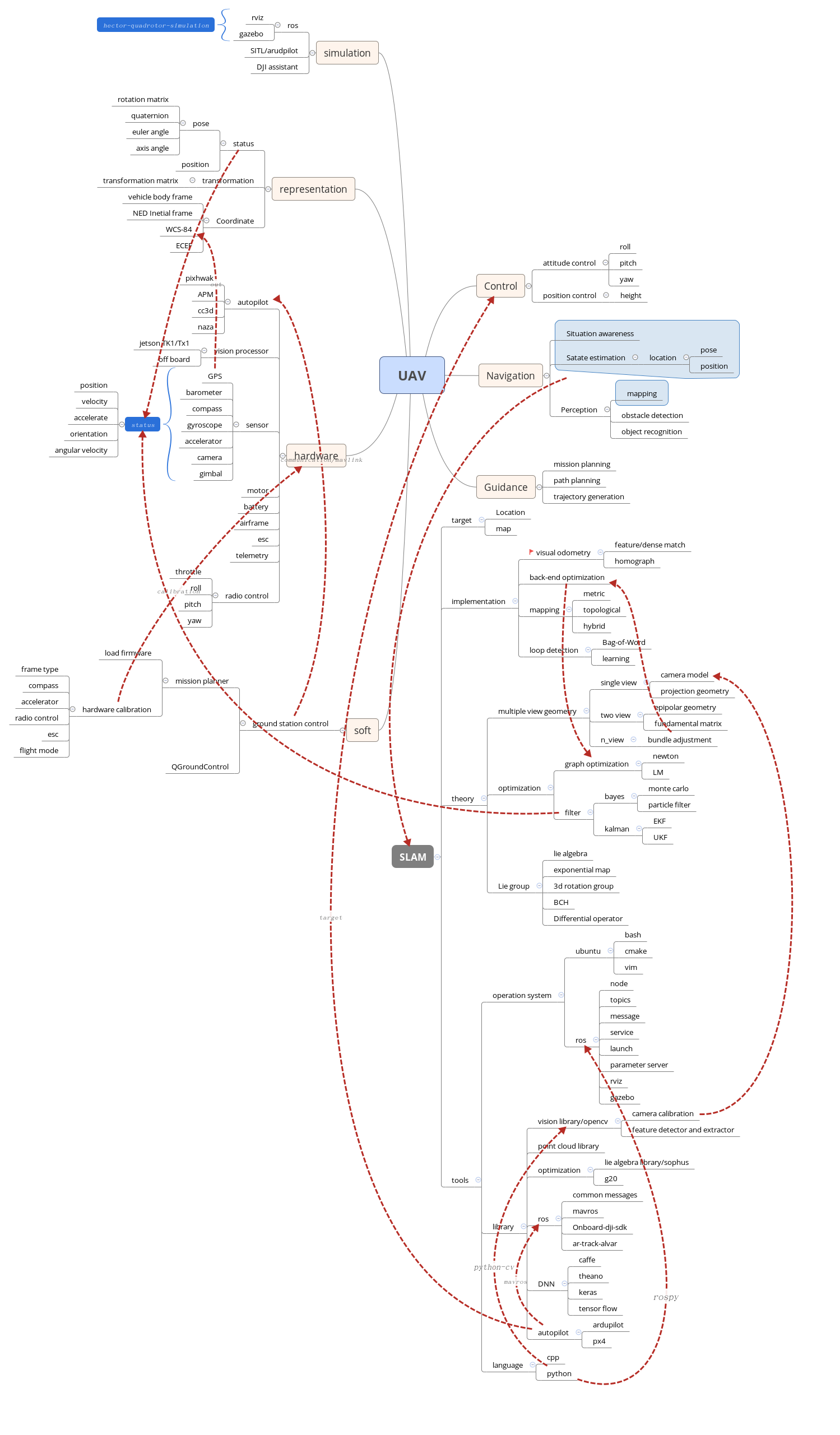
xmind
最后给自己画的的一个思维脑图
最后
以上就是活泼高山最近收集整理的关于UAV 预备知识的全部内容,更多相关UAV内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复