参考博客地址:
https://blog.csdn.net/weixin_43879302/article/details/105880972?utm_medium=distribute.pc_relevant.none-task-blog-BlogCommendFromMachineLearnPai2-3.edu_weight&depth_1-utm_source=distribute.pc_relevant.none-task-blog-BlogCommendFromMachineLearnPai2-3.edu_weight
状态方程:
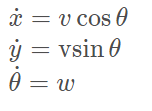
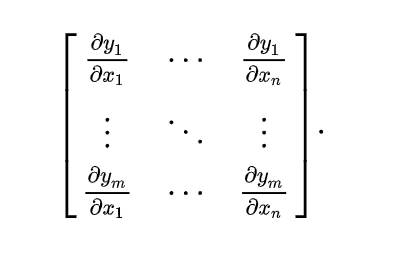
这里的状态方程是非线性化的,无法直接使用。需要在参考值ref处通过一阶泰勒公式进行展开,这个时候就可以得到A和B矩阵,是通过雅克比矩阵得到的。

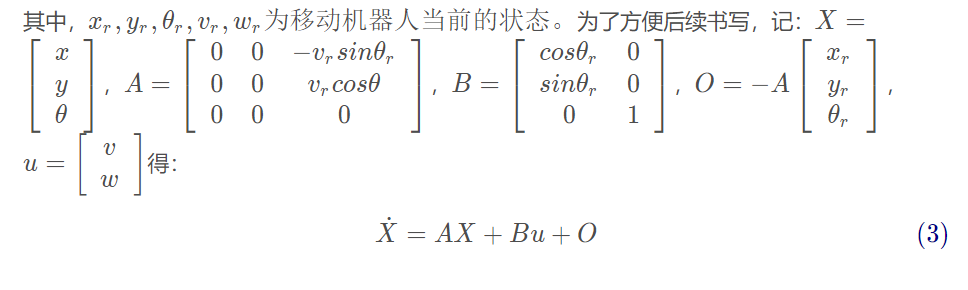
这个地方并不是将整个过程线性化了,而是将误差进行了线性化。
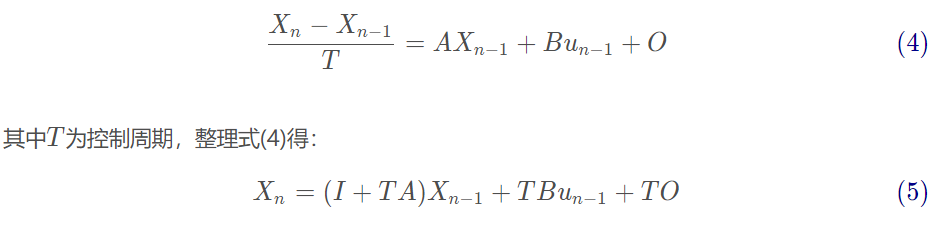
注意这里多了一个O矩阵,是将偏差部分单独拿出来成立了一项。
控制量的参考值是0,所以没用。
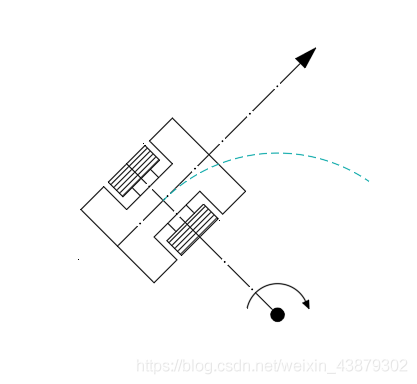
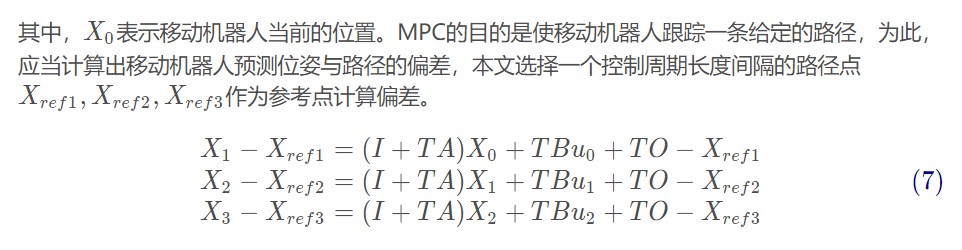
位置的参考值是通过轨迹规划确定的,这个是与时间严格相关的。
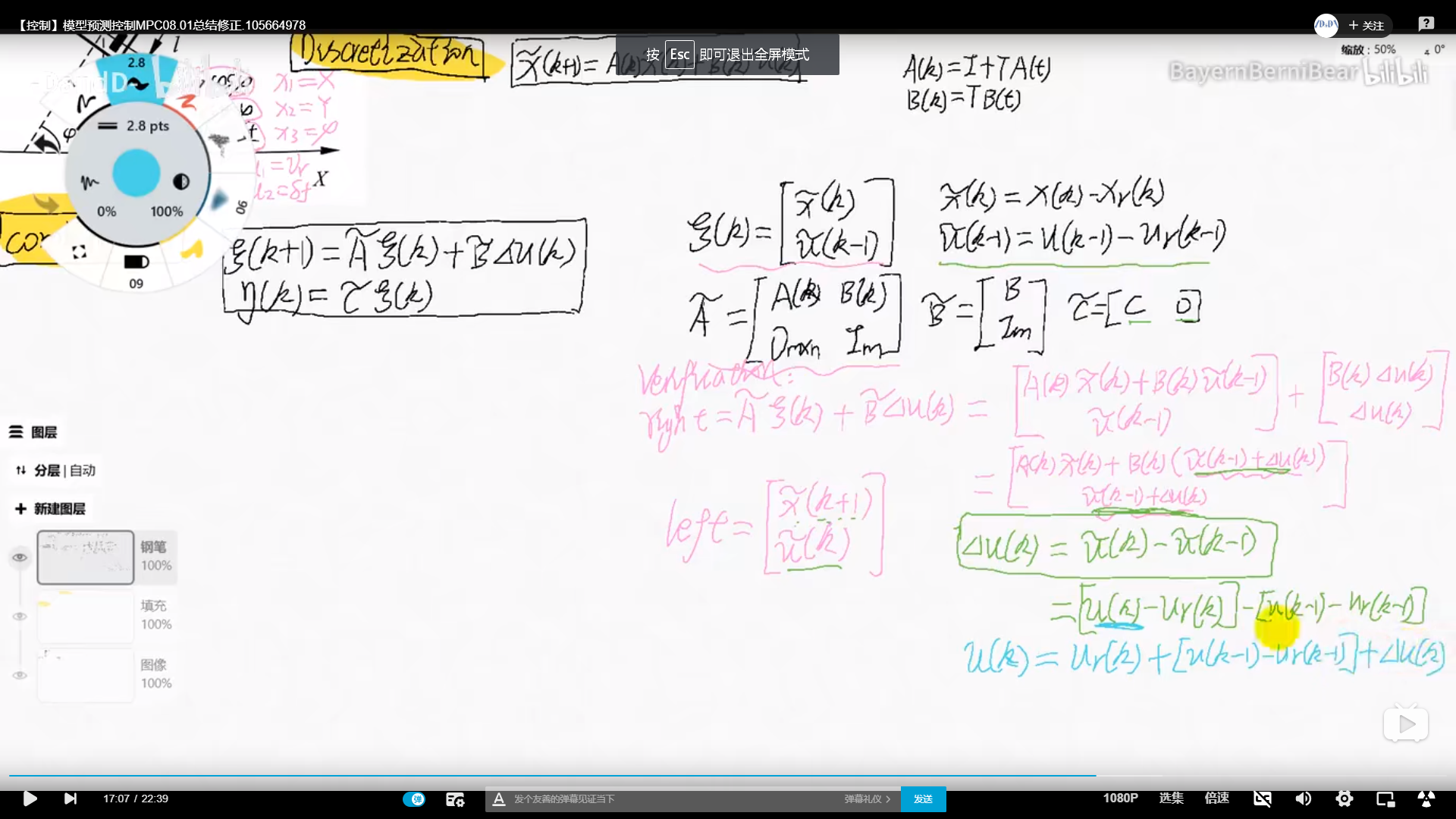
这个时候的运动方程还是无法直接使用,需要进行离散化,形成一个递推公式。
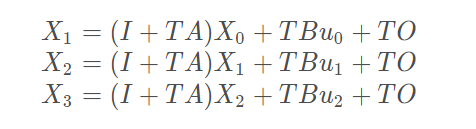
状态预测过程:
只是一个滚动优化的过程。形成多个预测时域和控制时域。
这里的参考点是严格与时间相关的,从轨迹规划的图中根据时间找到位置。
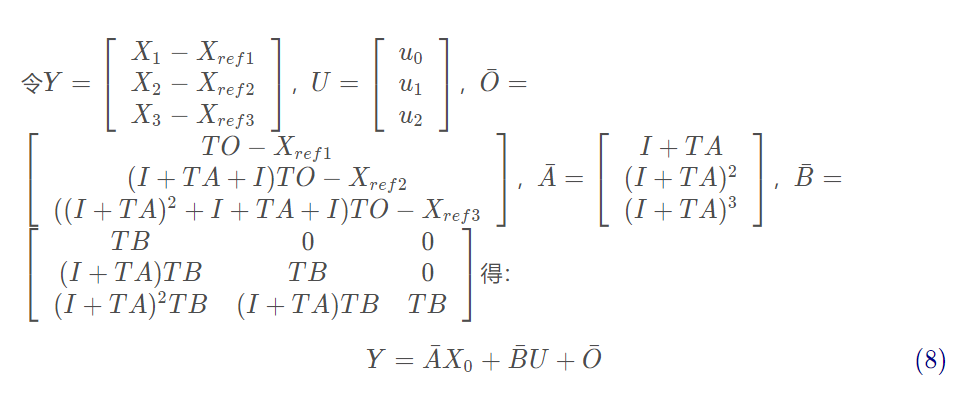
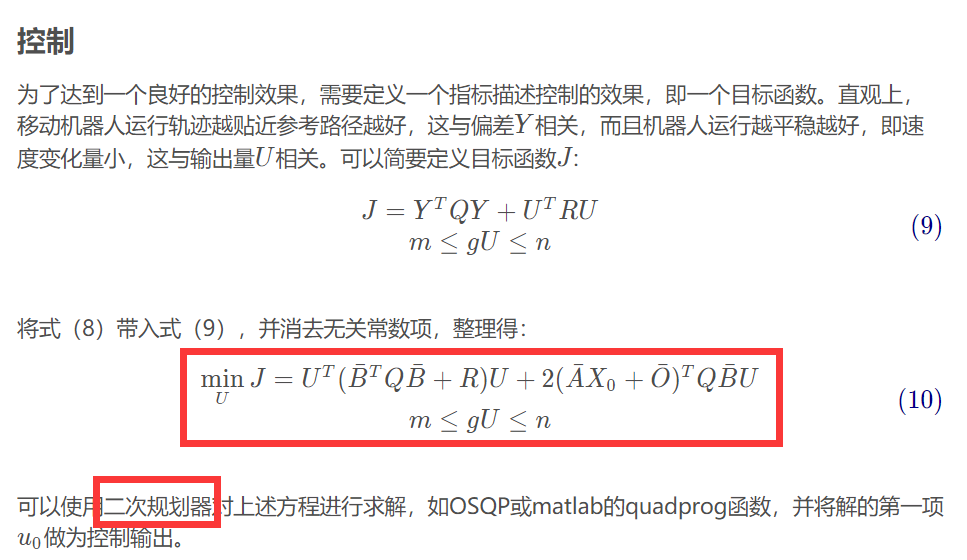
通过二次规划器找到最优解,将第一项作为输出。
这是一种基于偏差的方法,具体需要见视频,内在逻辑是一样的。
https://www.bilibili.com/video/BV1HQ4y1P7bJ?p=8
最后
以上就是坦率胡萝卜最近收集整理的关于MPC(模型预测控制,差分底盘距离)的全部内容,更多相关MPC(模型预测控制内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。


![[论文阅读]Road Mapping and Localization using Sparse Semantic Visual Features速读以下是精读部分](https://www.shuijiaxian.com/files_image/reation/bcimg18.png)


![[学习SLAM]分析总结常见的几种移动机器人底盘类型及其运动学 两轮差速底盘(Differential Drive robot)三轮全向轮底盘(Three-wheel omnidirectional wheel robot)四轮全向轮底盘(Four-wheel omnidirectional wheel robot)四轮麦克纳姆轮底盘(Four-wheeled Mecanum wheel robot)四轮滑移底盘(Four-wheel sliding robot)四轮阿克曼底盘(Four-wh](https://www.shuijiaxian.com/files_image/reation/bcimg21.png)


发表评论 取消回复