此paper由两项组成
data term 和 smooth term
data term 负责将template拉到对应点
smooth term 保证相邻两点的形变尽可能一致
公式构造很简单, 我只列一下每个变量的维数
W:N×N
W
:
N
×
N
V:N×4N
V
:
N
×
4
N
U˜:N×3
U
~
:
N
×
3
X:4N×3
X
:
4
N
×
3
B:4E×4N
B
:
4
E
×
4
N
A:4N×3
A
:
4
N
×
3
关键是11步的推导
argminAα∥A∥1+<Y,A−BX>+μ2∥A−BX∥FargminAα∥A∥1+121μ(A−BX+Yμ)
arg
min
A
α
‖
A
‖
1
+
<
Y
,
A
−
B
X
>
+
μ
2
‖
A
−
B
X
‖
F
arg
min
A
α
‖
A
‖
1
+
1
2
1
μ
(
A
−
B
X
+
Y
μ
)
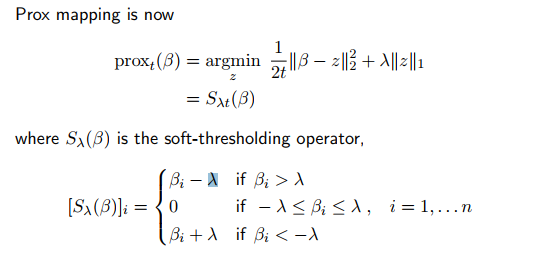
所以在我们的Paper里面为
Sαμ(BX−Yμ)
S
α
μ
(
B
X
−
Y
μ
)
即为公式11
更详细的推导请见:
http://blog.csdn.net/seamanj/article/details/79534536
最后
以上就是俭朴冰淇淋最近收集整理的关于sparse non-rigid registration of 3d shapes的全部内容,更多相关sparse内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复