点云模型与三维信息
三维图像是一种特殊的信息表达形式,其特征是表达的空间中三个维度的数据。和二维图像相比,三维图像借助第三个维度的信息,可以实现天然的物体-背景解耦。除此之外,对于视觉测量来说,物体的二维信息往往随射影方式而变化,但其三维特征对不同测量方式具有更好的统一性。与相片不同,三维图像时对一类信息的统称,信息还需要有具体的表现形式。其表现形式包括:深度图(以灰度表达物体与相机的距离),几何模型(由CAD软件建立),点云模型(所有逆向工程设备都将物体采样成点云)。可见,点云数据是最为常见也是最基础的三维模型。点云模型往往由测量直接得到,每个点对应一个测量点,未经过其他处理手段,故包含了最大的信息量。然而,这些信息隐藏在点云中需要以其他提取手段将其萃取出来,提取点云中信息的过程则为三维图像处理。
点云处理的三个层次
与图像处理类似,点云处理也存在不同层次的处理方式。或者说,根据任务的需求,需要组合不同的处理方式,而这些处理在过程上有先后之分。Marr将图像处理分为三个层次,低层次包括图像强化,滤波,边缘检测等基本操作。中层次包括连通域标记(label),图像分割等操作。高层次包括物体识别,场景分析等操作。工程中的任务往往需要用到多个层次的图像处理手段,在传统的图像处理方法中(传统就是不包括CNN神经网络和大数据集),图像处理的过程需要递增的使用不同层次图像处理来完成任务。
PCL官网对点云处理方法给出了较为明晰的层次划分,如图所示。
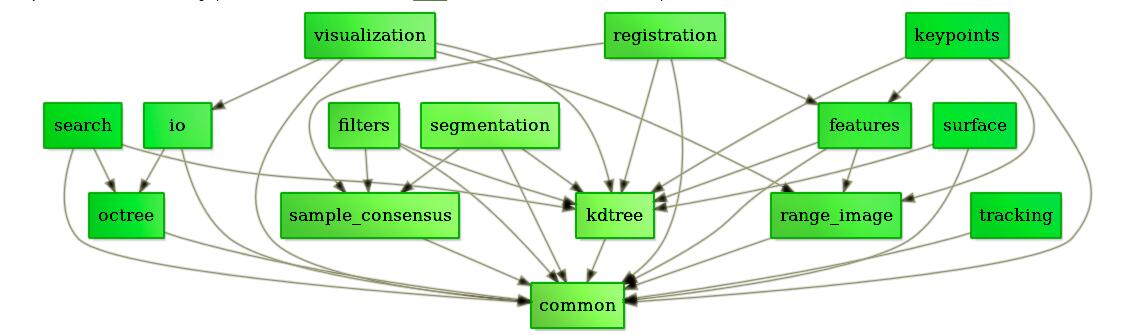
此处的common指的是点云数据的类型,包括XYZ,XYZC,XYZN,XYZG等很多类型点云,归根结底,最重要的信息还是包含在point<pcl::point::xyz>中。可以看出,低层次的点云处理主要包括滤波(filters),关键点(keypoints),分割(segmention)。分别对应图像处理中的滤波,边缘检测,分割。显然,在图像处理中还是中层次的分割操作,由于点云的特性被简化到了低层次的水平,本质上与滤波和关键点提取难度相当了。点云的中层次处理则是特征描述(feature)。高层次处理包括配准(registration),识别(recognition)。可见,点云在分割的难易程度上比图像处理更有优势。准确的分割也为识别打好了基础。
最后
以上就是舒适鼠标最近收集整理的关于PCL—综述—三维图像处理点云模型与三维信息 点云处理的三个层次的全部内容,更多相关PCL—综述—三维图像处理点云模型与三维信息 点云处理内容请搜索靠谱客的其他文章。








发表评论 取消回复