表4编程口


这三个端口另一个共同的特点就是,一旦客户端打开端口,就会按照一定的频率收到来自机器人的信息。需要注意的是30003端口是实时反馈端口,客户端每8ms能收到一次来自机器人的信息。另外,通过测试,客户端通过30001和30002只能每200ms左右收到来自机器人的信息。
其实客户端通过这三个端口收到的机器人信息也稍有不同。通过30003端口收到信息是最丰富的,包含了通过30002收到的信息以及通过30001收到的大部分信息。
所以说通过实时反馈端口,客户端收到机器人信息效率是最高的,内容也是最全的。通过实时反馈端口每次收到的数据包有1044个字节,这些字节以标准的格式排列。注意在极少情况下客户端会收到小于1044个字节,但是字节排列的格式不变。下表是1044字节排列的顺序表。
字节顺序内容
1-4整个数据包的字节数
5-12控制器通电时间,断电清零
13-444关节目标位置、速度、加速度、电流、扭矩,实际位置、速度、电流,控制电流
445-684TCP位置、速度、力,0目标位置、速度
685-692输入位状态
693-740电机温度
740-748程序扫描时间
749-756保留
757-820机器人模式,关节模式,安全模式
821-868保留
869-892TCP加速度
893-940保留
941-948速度比例
949-956机器人当前动量值
957-972保留
973-996控制板电压,机器人电压,机器人电流
997-1044关节电压
表5实时反馈数据包

有了这些数据,上位机的数据表现就会十分丰富。下面有2张上位机界面图,“点动图”获取了关节位置、TCP位置;“初始化图”获取了关节模式、关节实际电流、关节电压以及其他数据。
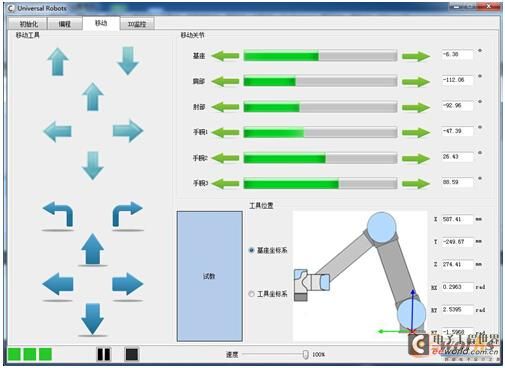
图5点动图

图6初始化图
7、结束语
综上所述,机器人作为ModbusTCP服务器,上位机通过502端口可以控制机器人的所有IO;上位机可以通过30001或30002或30003端口远程下载程序到机器人;上位机通过29999端口可以远程控制程序运行状态;上位机通过30003端口可以实时得到机器人的状态信息。也就是说,利用UR机器人开放的基于TCP/IP协议的端口,可以制作自己的Polyscope软件,实现上位机的远程控制。
最后
以上就是细心黄豆最近收集整理的关于java实现上位机远程控制_基于TCP/IP协议实现上位机对UR机器人的远程控制的全部内容,更多相关java实现上位机远程控制_基于TCP/IP协议实现上位机对UR机器人内容请搜索靠谱客的其他文章。








发表评论 取消回复