记录一下,总忘,出现问题解决问题,浪费时间。。。。。。。。。
用kinect2 跑ORB_SLAM2要安装 ROS、 安装Kinect2驱动 libfreenect2 以及ros接口 iai-kinect2
然后开始安装编译ORB_SLAM2:
1. github 下载源码解压
2. 添加环境变量在 ./bashrc 中 (添加路径和包)
$ export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/user/ORB_SLAM2/Examples/ROS
3. 编译ORB-SLAM2,第三方库中的DBoW2和g2o,并解压ORB词典,包括编译ORB_SLAM2
$ cd ORB_SLAM2
$ chmod +x build.sh
$ ./build.sh
然后修改订阅话题,运行 ORB_SLAM2:
1. 通过 ros 驱动 kinect2
$ roslaunch kinect2_bridge kinect2_bridge.launch
2. 用 rostopic list 查阅发布话题(折叠排版好点 。。。)


/kinect2/bond
/kinect2/hd/camera_info
/kinect2/hd/image_color
/kinect2/hd/image_color/compressed
/kinect2/hd/image_color_rect
/kinect2/hd/image_color_rect/compressed
/kinect2/hd/image_depth_rect
/kinect2/hd/image_depth_rect/compressed
/kinect2/hd/image_mono
/kinect2/hd/image_mono/compressed
/kinect2/hd/image_mono_rect
/kinect2/hd/image_mono_rect/compressed
/kinect2/hd/points
/kinect2/qhd/camera_info
/kinect2/qhd/image_color
/kinect2/qhd/image_color/compressed
/kinect2/qhd/image_color_rect
/kinect2/qhd/image_color_rect/compressed
/kinect2/qhd/image_depth_rect
/kinect2/qhd/image_depth_rect/compressed
/kinect2/qhd/image_mono
/kinect2/qhd/image_mono/compressed
/kinect2/qhd/image_mono_rect
/kinect2/qhd/image_mono_rect/compressed
/kinect2/qhd/points
/kinect2/sd/camera_info
/kinect2/sd/image_color_rect
/kinect2/sd/image_color_rect/compressed
/kinect2/sd/image_depth
/kinect2/sd/image_depth/compressed
/kinect2/sd/image_depth_rect
/kinect2/sd/image_depth_rect/compressed
/kinect2/sd/image_ir
/kinect2/sd/image_ir/compressed
/kinect2/sd/image_ir_rect
/kinect2/sd/image_ir_rect/compressed
/kinect2/sd/points
/rosout
/rosout_agg
选择 /kinect2/qhd/image_color 和 /kinect2/qhd/image_depth_rect 这两个话题
打开 ORB-SLAM2/Example/ROS/ORBSLAM2/src/ros_rgbd.cc文件,修改订阅话题(68/69行)
message_filters::Subscriber<sensor_msgs::Image> rgb_sub(nh,"/kinect2/qhd/image_color",1); message_filters::Subscriber<sensor_msgs::Image> depth_sub(nh,"/kinect2/qhd/image_depth_rect",1);
3. 编译 ros 节点
$ chmod +x build_ros.sh $ ./build_ros.sh
4. 新建kinect2.yaml文件
获取内参和畸变系数后,在 ORB_SLAM2/Examples/RGB-D 下新建 kinect2.yaml,参照 Examples/RGB-D/TUM1.yaml,修改对应参数。
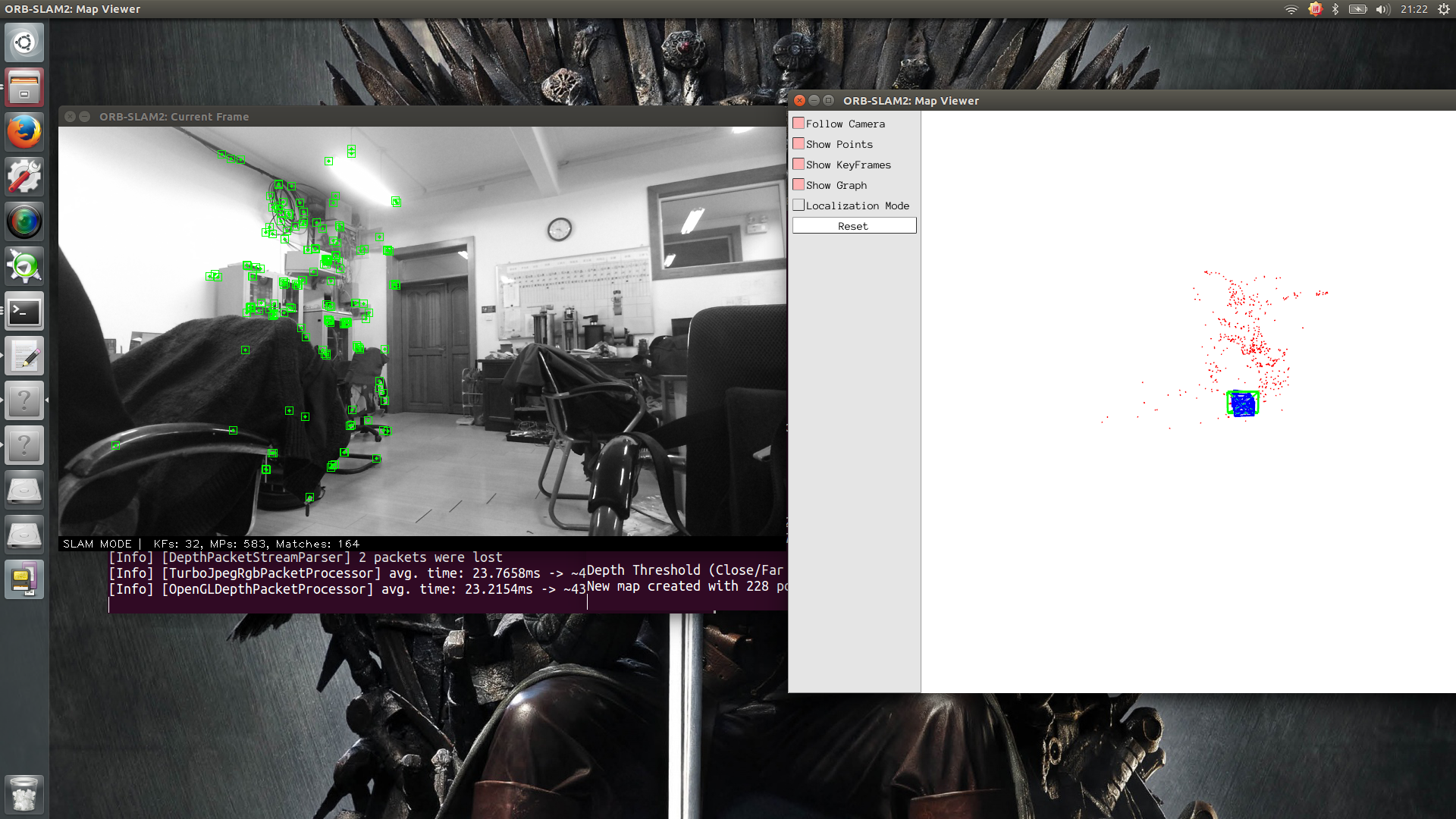
5. 运行ORB_SLAM2
在~/ORB_SLAM2/Examples/ROS$ 目录下,运行:
$ rosrun ORB_SLAM2 RGBD Vocabulary/ORBvoc.txt Examples/RGB-D/kinect2.yaml
运行ORB_SLAM2前,确保运行 roslaunch kinect2_bridge kinect2_bridge.launch 发布图片消息
转载于:https://www.cnblogs.com/kidycharon/p/9966336.html
最后
以上就是开放灯泡最近收集整理的关于ROS + Kinect2 跑ORB_SLAM2 安装步骤记录的全部内容,更多相关ROS内容请搜索靠谱客的其他文章。








发表评论 取消回复