前提
Ubuntu版本:16.04
安装过程
1.设置你的sources.list
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2.下载安装秘钥
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA1163.确保您的Debian软件包索引是最新的:
sudo apt-get update4.安装Kinetic桌面完整安装:(推荐):
sudo apt-get install ros-kinetic-desktop-full5.Initialize rosdep
(1)初始化rosdep
sudo rosdep init
rosdep update(2)环境设置
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc6.安装软件包的依赖关系
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential7.检查是否安装成功
(1)输入下面的命令行
roscore
(2)另外打开一个终端,输入:
rosrun rviz rviz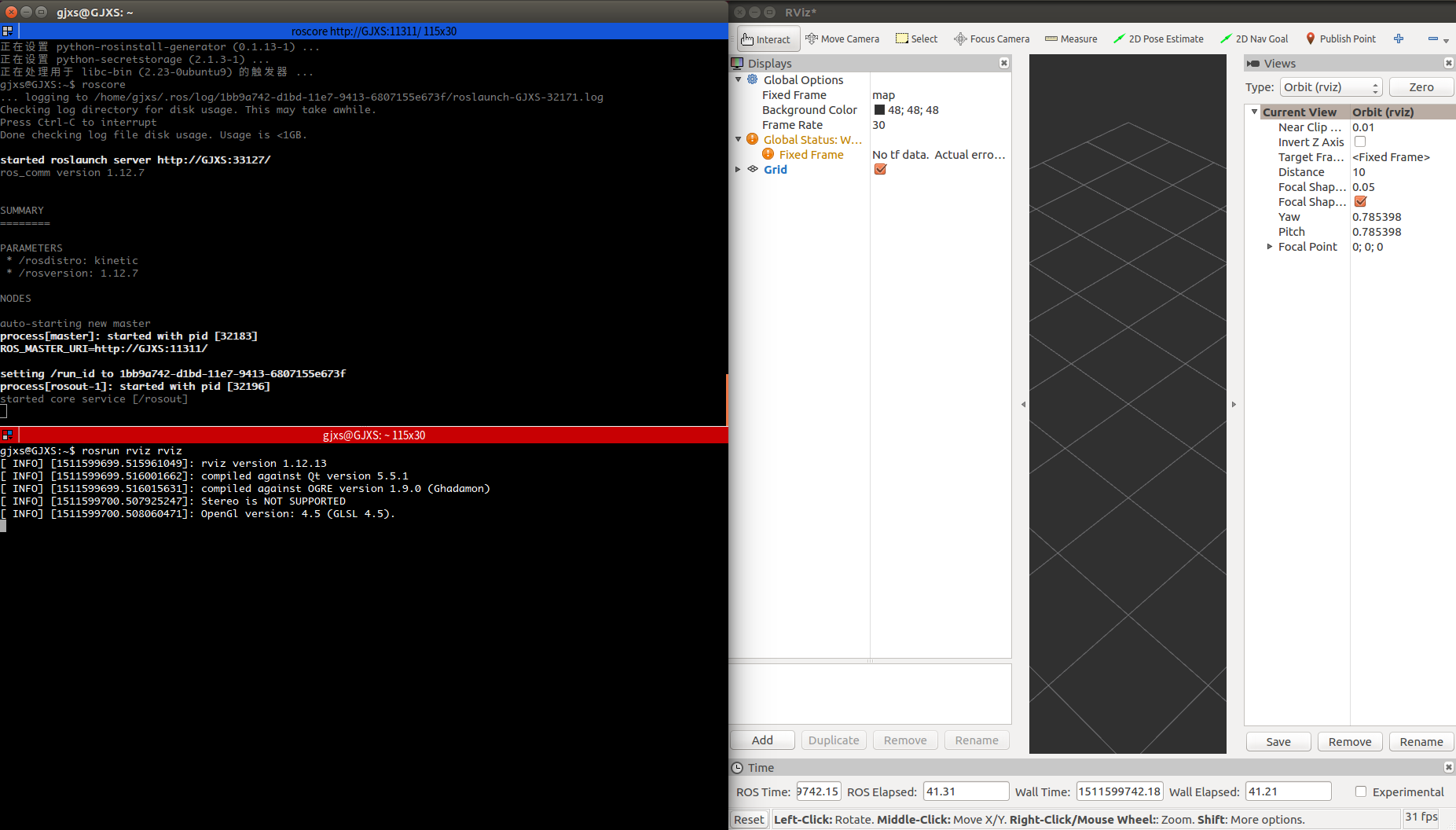
可以打开rviz就说明已经成功了
本文更新版本在个人博客GJXS BLOG
最后
以上就是追寻蛋挞最近收集整理的关于Ubuntu16.04安装Kinetic的全部内容,更多相关Ubuntu16内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复