原博客地址 https://blog.csdn.net/u013453604/article/details/72903398
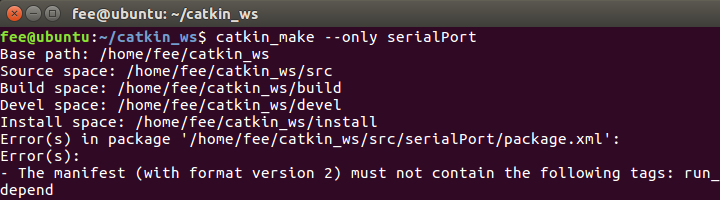
按照博主的说明步骤catkin_make时报错
查阅资料后得知:
当你在package.xml中,添加完run_depend后,编译出错,显示The manifest must not cotain the following tags:run_depend,这是因为目前一共有两种软件包格式,目前的有关ROS的教程中,大多讲的是第一种,四种依赖关系分别是
<buildtool_depend>
<build_depend>
<run_depend>
<test_depend>
第二种是新的,他的依赖关系分别是
<buildtool_depend>
<build_depend>
<build_export_depend>
<exec_depend>
<test_depend>
<doc_depend>
所以,当你run_depend出错时,有可能是你的软件包格式是第二种,所以要把run_depend改成exec_depend
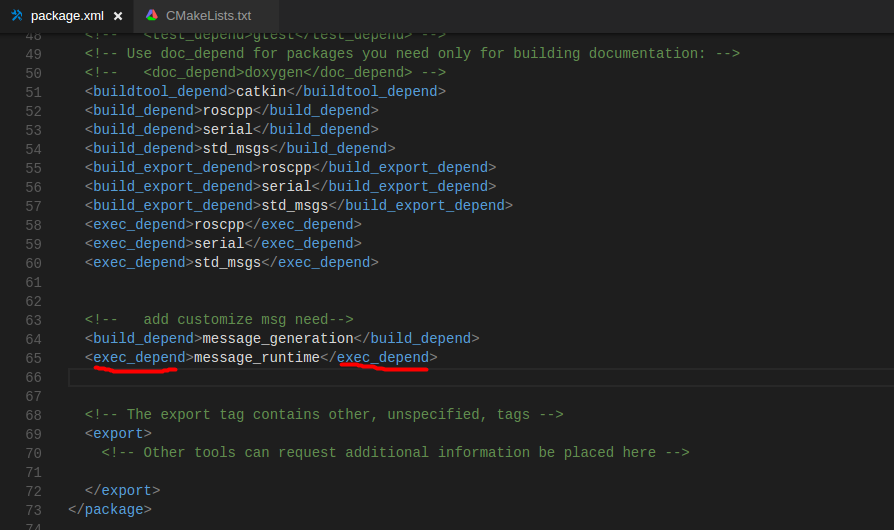
问题解决!
再次编译继续报错 (/ □ )!!!
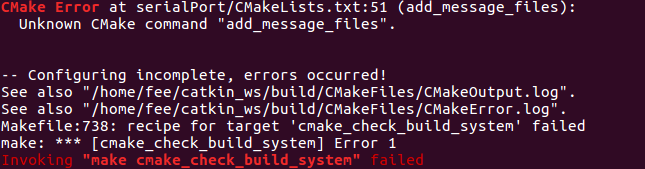
查找ros wiki 找到答案
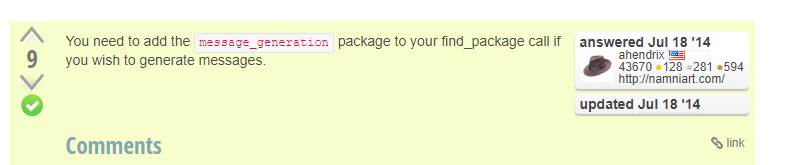
在CMakelists.txt中 findpackage 中添加 message_generation
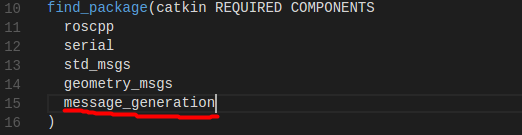
问题解决编译通过。
项目因为要从串口读取sting类型数据,处理后转换为double类型数据,通过话题发布
因此需要涉及到自定义消息类型以及数据类型转换方面的问题。在另外一篇博客中
一位博主讲的非常详细
https://www.jianshu.com/p/3ed51b015223
最后
以上就是彩色小懒猪最近收集整理的关于ROS自定义msg类型及使用的全部内容,更多相关ROS自定义msg类型及使用内容请搜索靠谱客的其他文章。








发表评论 取消回复