Jupyter一直是非常受欢迎的交互式笔记本,但是机器人爱好者没有太多机会用它。
最近,Jupyter-ROS插件出炉了,可以用Jupyter实现ROS功能。
而且你只需要一个浏览器界面,不用安装设置,直接在云端运行,简直不要太方便。
现在,你的机器人可以在Jupyter里跳舞了。
此前,如果想用ROS,至少你需要会用Linux和Qt框架,下载安装环境搭建……做各种准备工作。
但现在,如果你依靠Jupyter和ipywidgets框架是用ROS,完全不用这么麻烦:
只要有一个Web浏览器就行,不受Linux限制,不需要编译Qt应用;
复杂的功能,也可以只靠浏览器就搞定,比如:JavaScript滑块、3D WebGL、WebRTC实时视频流……
而且不用在本地运行,可以跑在远程服务器上,不需要手动设置,也不用安装,几乎是即开即用,省略了前期的各种复杂步骤。
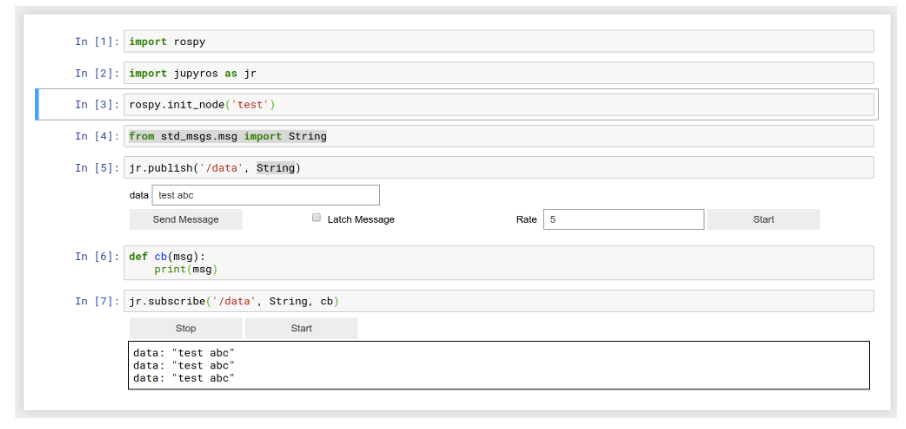
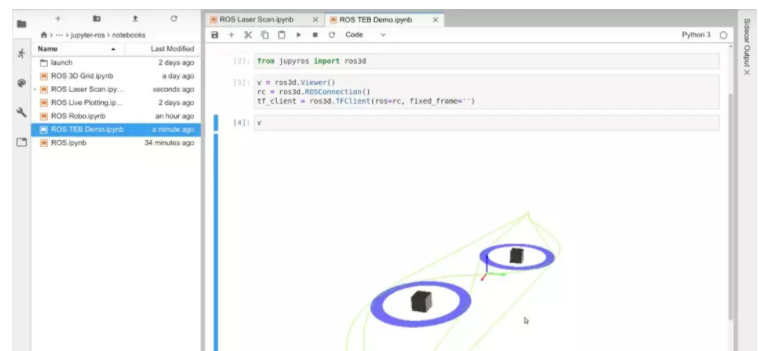
界面也十分简洁,一个窗口就够用,代码和交互界面不分开,两者都在同一个笔记本内。
敲几行代码,就可以召唤可视化界面。
另外,使用Jupyter-ROS,可以借助bqplot绘图。
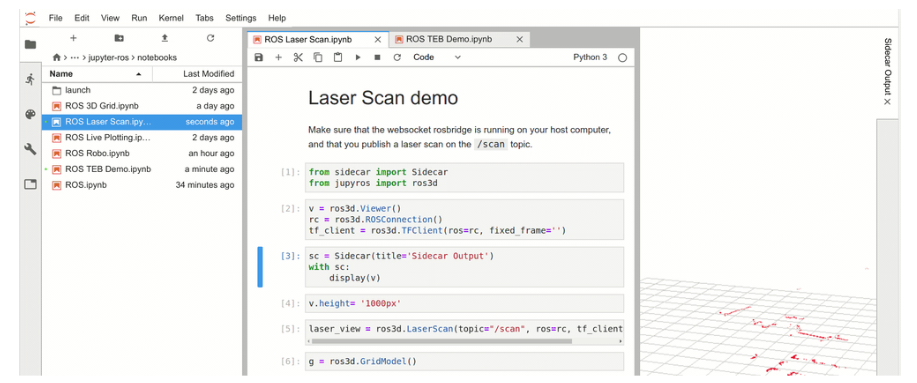
当然也可以实现3D可视化,一般用的工具是RViz。
现在一些RViz的功能也可以移植到Web浏览器里,用代码把RViz可视化和不同数据类型结合,比如激光扫描、机器人轨迹、机器人3D(URDF)模型等。
相关使用方法见如下网址:
GitHub:https://github.com/RoboStack/jupyter-ros
bqplot绘图工具:https://github.com/bloomberg/bqplot
最后
以上就是笨笨金针菇最近收集整理的关于Jupyter-ROS(机器人操作系统)的全部内容,更多相关Jupyter-ROS(机器人操作系统)内容请搜索靠谱客的其他文章。








发表评论 取消回复