预需求:
- 安装好pycharm
- 安装好ros
1.在.bashrc 文件夹中加入ros路径
source /opt/ros/melodic/setup.bash
2.创建pycharm快捷方式
sudo gedit /usr/share/applications/pycharm.desktop
将如下内容复制到上面打开的文件:
[Desktop Entry]
Type=Application
Name=Pycharm
GenericName=Pycharm3
Comment=Pycharm3:The Python IDE
Exec=bash -i -c "/home/hadoop/python/Pycharm/pycharm-community-2017.3/bin/pycharm.sh" %f
Icon=/home/hadoop/python/Pycharm/pycharm-community-2017.3/bin/pycharm.png
Terminal=pycharm
Categories=Pycharm;
bash -i -c 使得在每次打开pycharm前都导入环境变量。
你需要修改的地方就是Exec和Icon两个属性,其他的不用管。其中,Exec中的路径为你pycharm解压包对应的位置。
3.添加可执行权限
sudo chmod +x /usr/share/applications/pycharm.desktop
此时即可在pycharm下使用ros了。
4. 安装conda
按照通用教程一路安装conda,在选择是否初始化conda时填写yes。
此时,主目录下.bashrc文件中出现如下字段:
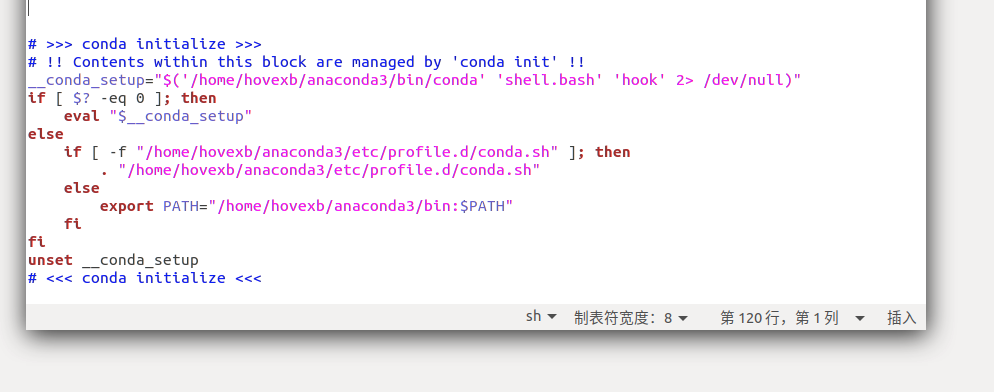
该初始化的作用是每次调用控制台时,自动进入conda base环境,如下图。
但此时出现一个问题,ros是基于python2安装的,而conda base环境是python3的,此两者间有冲突。此时若运行ros的py脚本会出现缺失各种包。
有两种解决方案:
1.方法一: 在conda环境下安装缺失的ros包
conda install setuptools
pip install -U rosdep rosinstall_generator wstool rosinstall six vcstools
2.方法二:禁用conda的自动进入conda base的做法
conda config --set auto_activate_base false
最后
以上就是壮观老鼠最近收集整理的关于Ubuntu18.04 ros与conda共存以及使用pycharm作为IDE的全部内容,更多相关Ubuntu18.04内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复