我是靠谱客的博主 腼腆乐曲,这篇文章主要介绍ROS机器人032-机器人实现分布式通信一、设置笔记本端与工控机端ip地址二、设置笔记本端与工控机端的/etc/hosts三、测试互ping四、搭建笔记本端.bashrc环境四、小海龟测试,现在分享给大家,希望可以做个参考。


一、设置笔记本端与工控机端ip地址
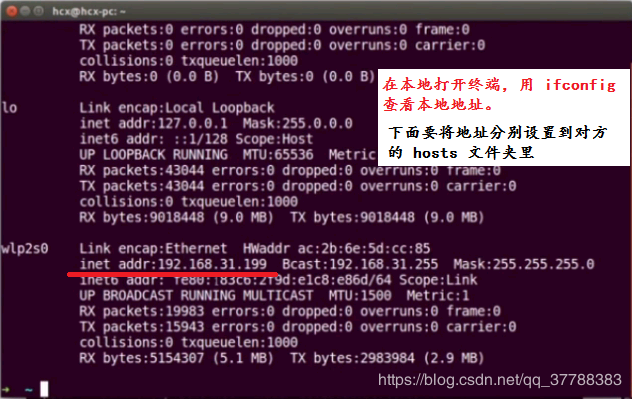
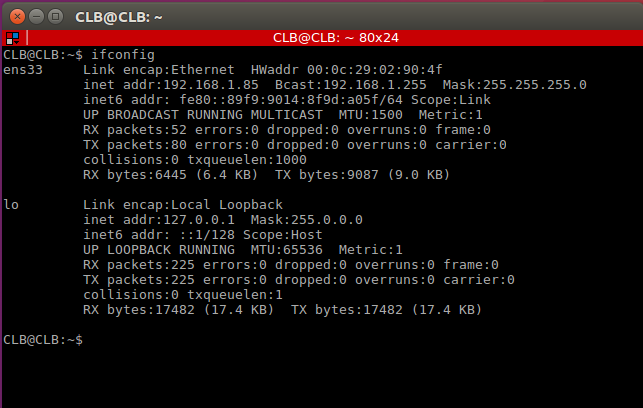
笔记本端
ifconfig
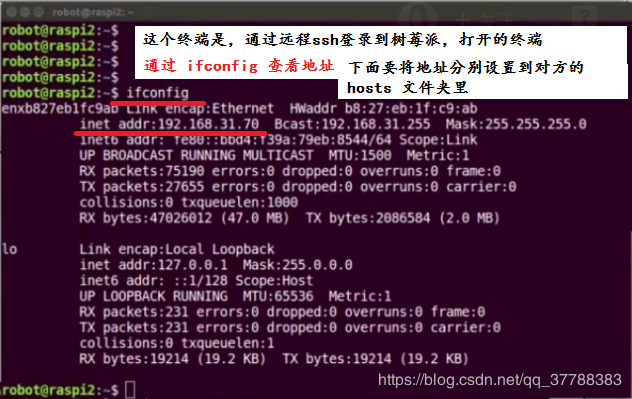
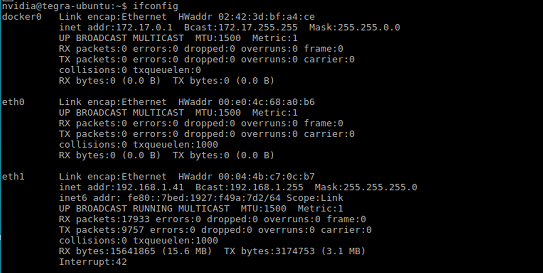
工控机端(TX2)
ifconfig
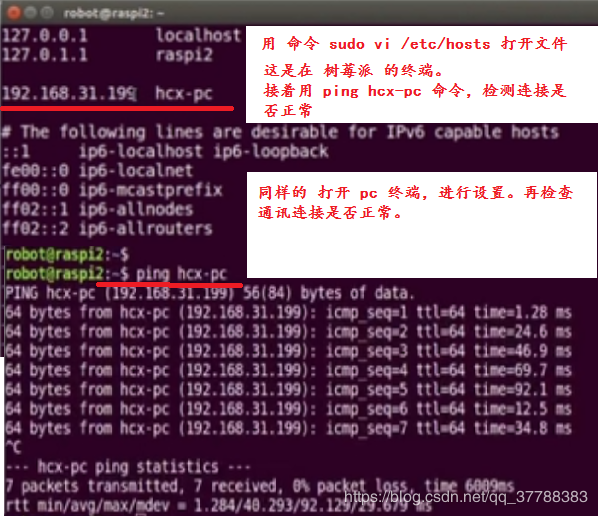
二、设置笔记本端与工控机端的/etc/hosts
分别了解了之后,需要在两台机子上的/etc/hosts文件加入对方的IP地址和对应的计算机名字
举例如下:
在工控机上终端操作,或者远程操工控机
(计算机名为:CLB)
(工控机名为:nvidia)
1.打开笔记本端的/etc/hosts
vim /etc/hosts
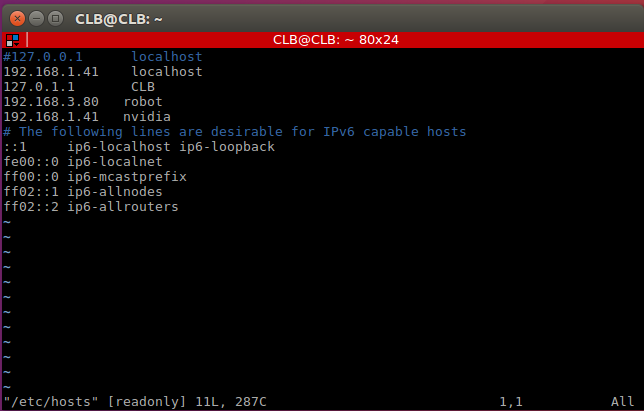
2.打开工控机端的/etc/hosts
vim /etc/hosts
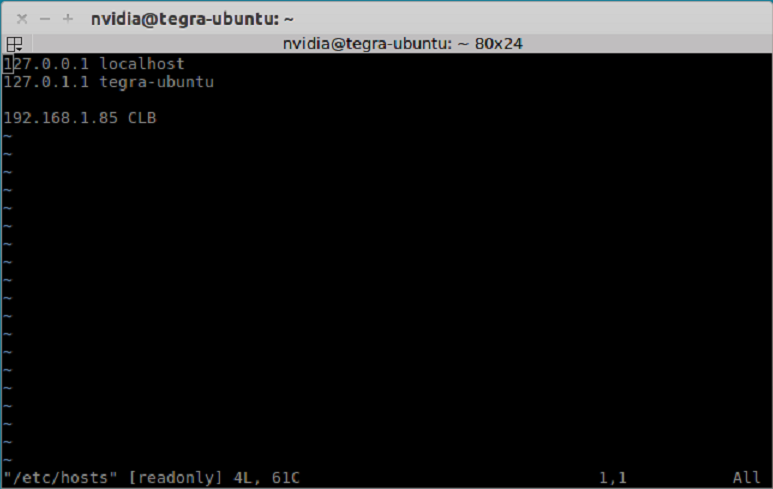
保存退出
三、测试互ping
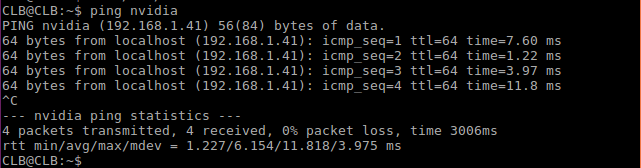
笔记本端ping工控机
ping nvidia
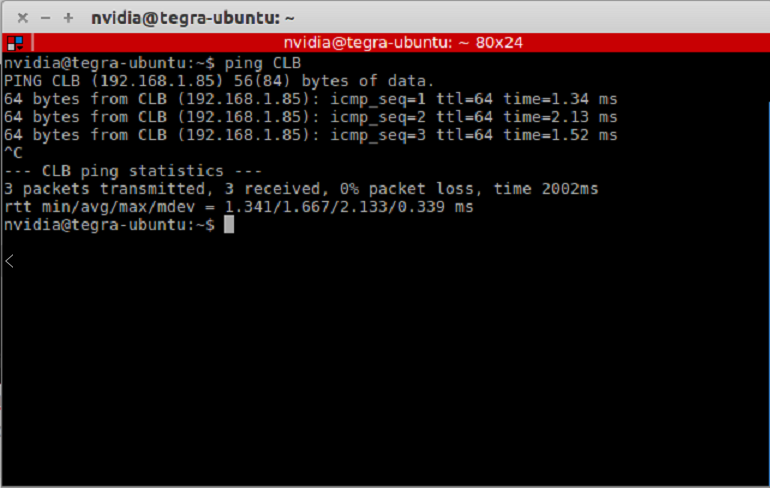
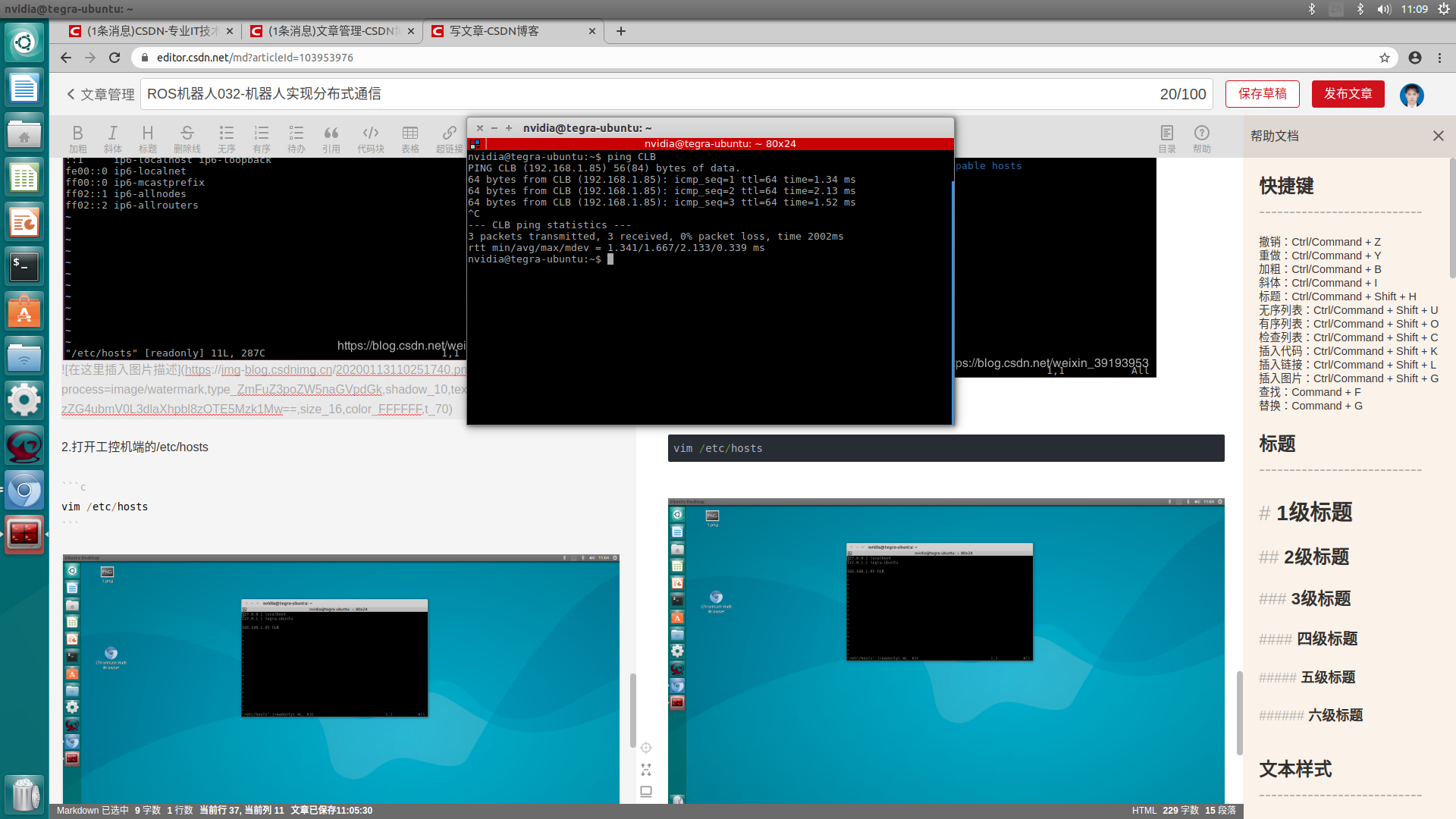
工控机ping笔记本
ping CLB
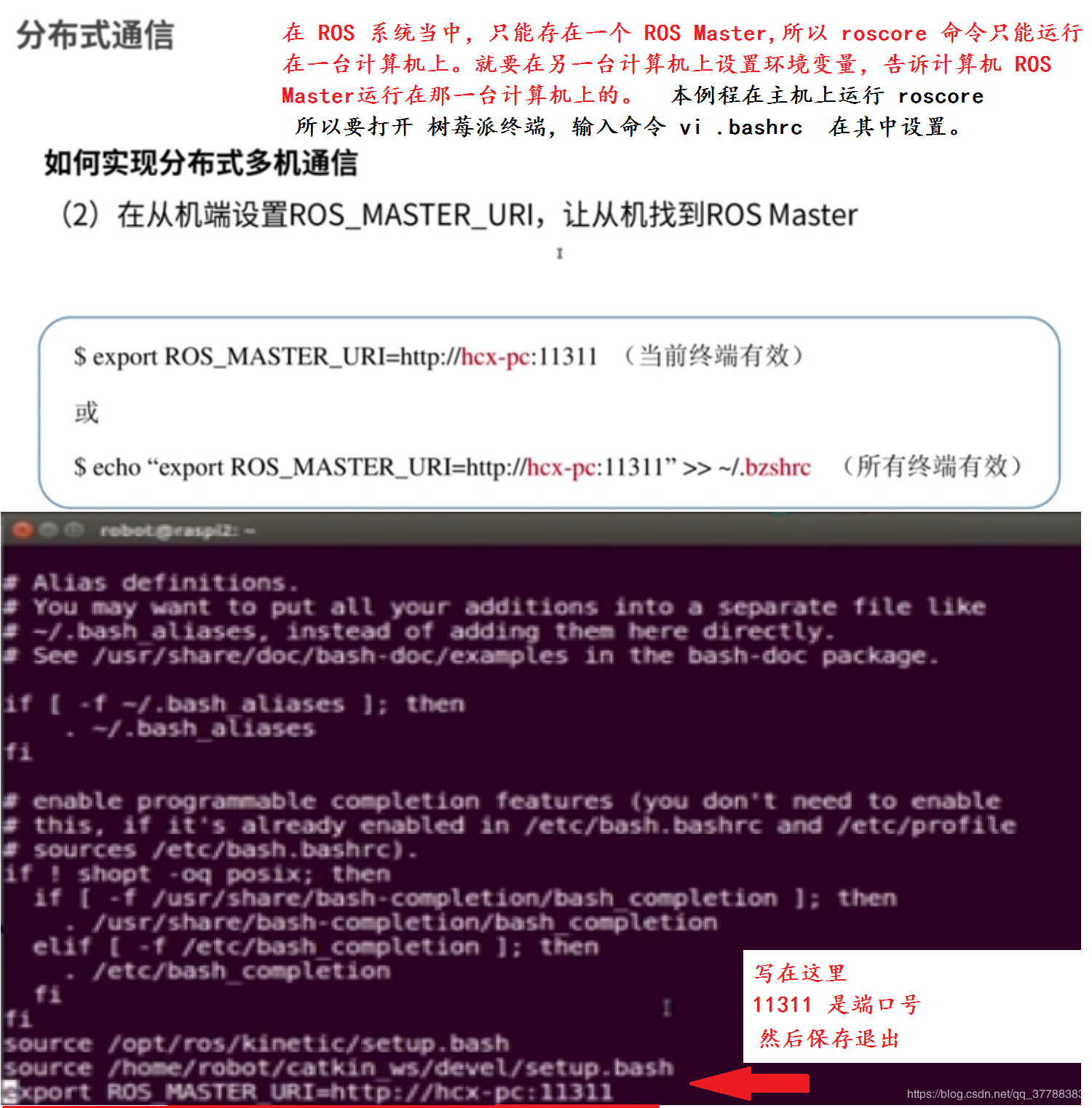
四、搭建笔记本端.bashrc环境
vim ~/.bashrc
设置笔记本端的roscore路径,设置roscore在工控机端
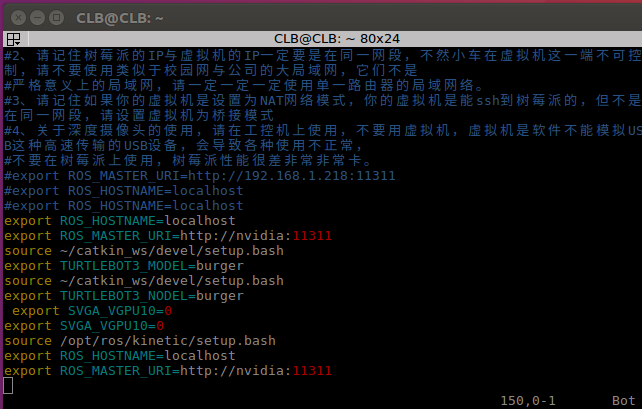
ROS分布式系统搭建完成
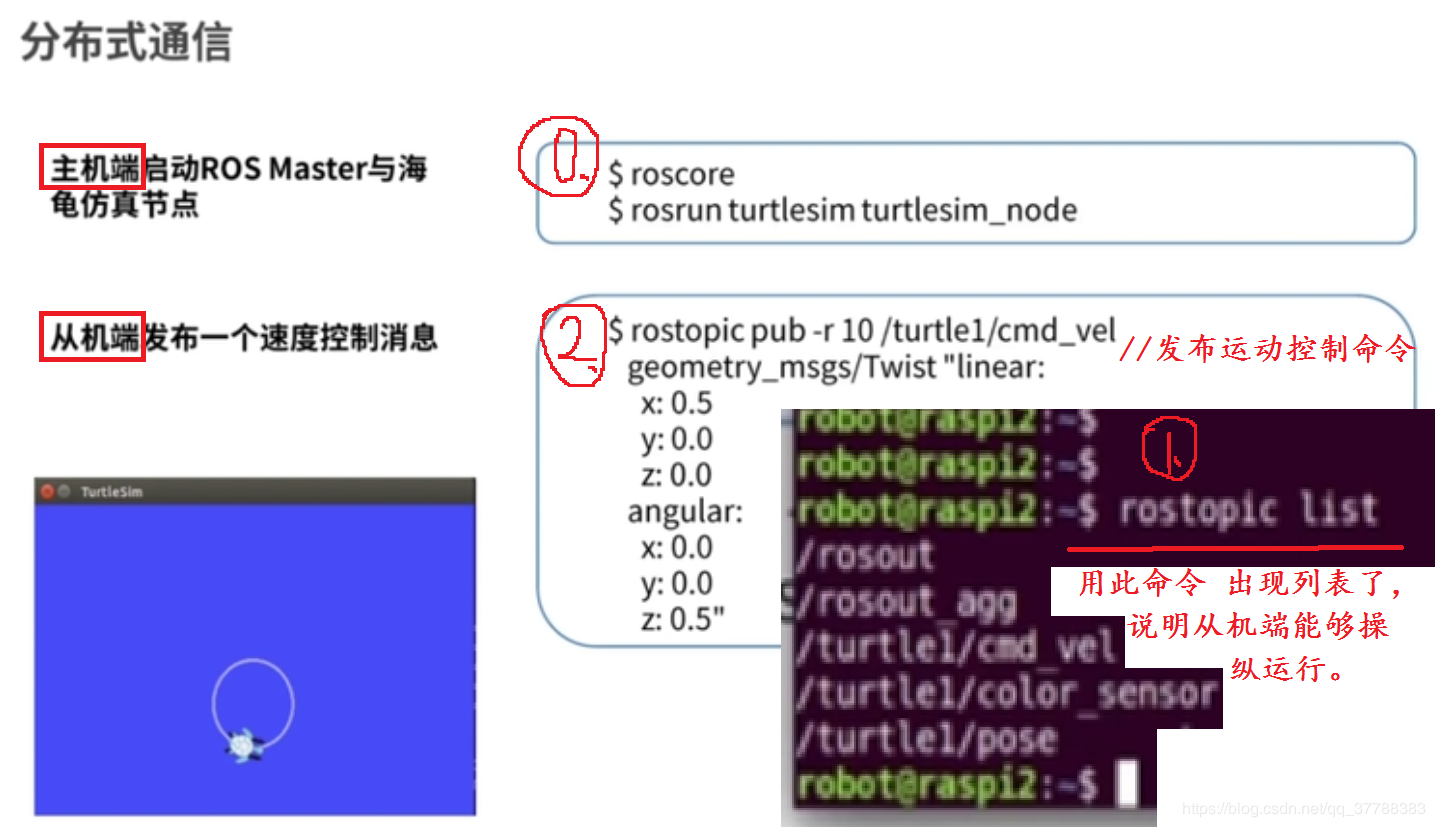
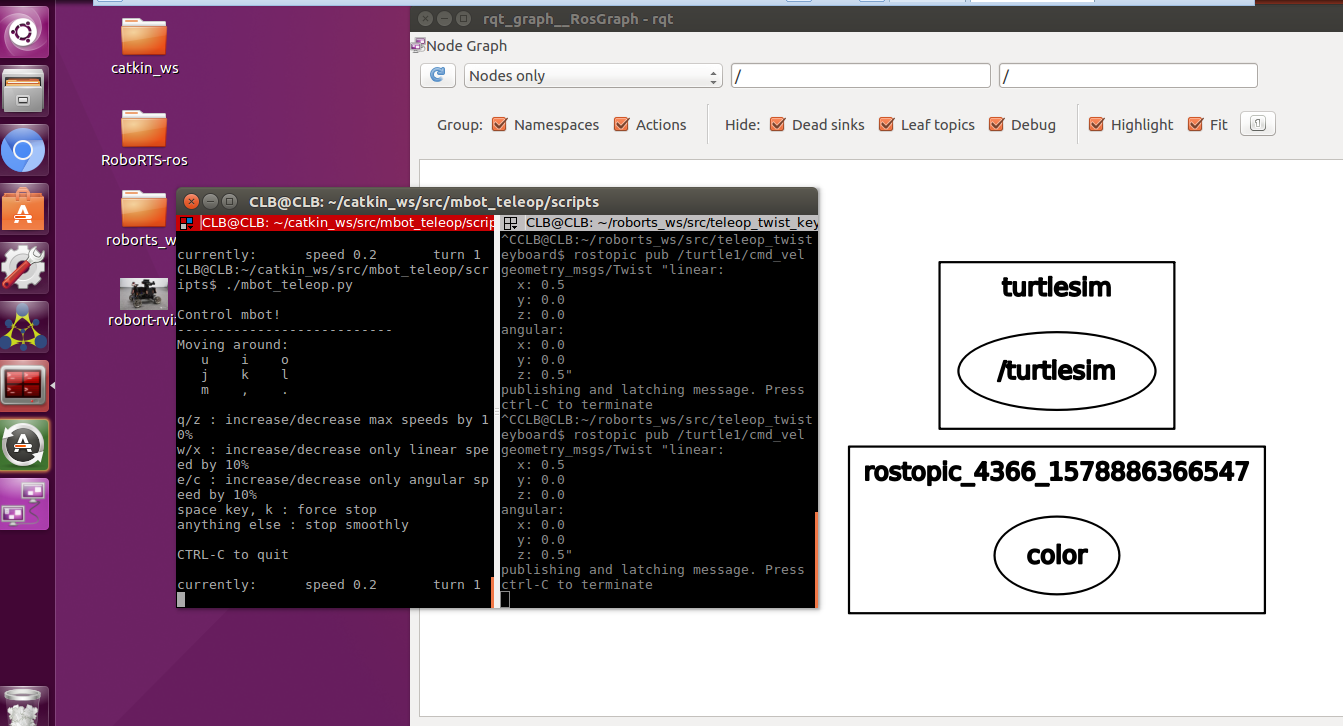
四、小海龟测试
工控机端
笔记本端
最后
以上就是腼腆乐曲最近收集整理的关于ROS机器人032-机器人实现分布式通信一、设置笔记本端与工控机端ip地址二、设置笔记本端与工控机端的/etc/hosts三、测试互ping四、搭建笔记本端.bashrc环境四、小海龟测试的全部内容,更多相关ROS机器人032-机器人实现分布式通信一、设置笔记本端与工控机端ip地址二、设置笔记本端与工控机端内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。



![[android]清单文件中MAIN与LAUNCHER的区别](https://www.shuijiaxian.com/files_image/reation/bcimg1.png)




发表评论 取消回复